
Fターム[2F065QQ14]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の積分 (316)
Fターム[2F065QQ14]の下位に属するFターム
移動平均 (66)
Fターム[2F065QQ14]に分類される特許
141 - 160 / 250
表面形状プロファイルを測定するための方法および装置
シート材料の表面の形状プロファイルを測定するための装置は、前記シート材料の表面に向けて光ビームを提供する光源と、前記光ビームが前記表面で検出される際に前記表面の複数の位置に入射して、前記複数の位置のそれぞれにおいて反射光ビームを生じるように前記光源を前記シート材料の表面上を移動させるために前記光源に連結する線形の移動ステージと、前記複数の位置のそれぞれにおいて生じた反射光ビームを選択的に受信するために所定の位置に配置される複数の光受信器と、前記光源と前記複数の位置のそれぞれで生じた反射光ビームを受信する前記複数の光受信器から選択される1つの光受信器との位置差に関する情報を受信するように構成されるデータ収集装置と、前記位置差情報を前記シート材料の表面の形状プロファイルと関連付けるように構成されるデータ解析装置とを備えている。  (もっと読む)
(もっと読む)
多層膜解析装置および多層膜解析方法

【課題】波長依存性を有する多層膜試料の膜厚をより高い精度を測定することが可能な多層膜解析装置および多層膜解析方法を提供する。
【解決手段】波数変換部721は、バッファ部71に格納される波長毎に、波数K1(λ)および波数変換反射率R1’(λ)(=R(λ)/(1−R(λ)))を順次算出し、バッファ部731へ出力する。バッファ部731は、波数変換部721から順次出力される波数K1(λ)と波数変換反射率R1’(λ)とを対応付けて格納する。フーリエ変換部741は、バッファ部731に格納される波数変換反射率R1’(K1)を波数K1についてフーリエ変換を行って、パワースペクトルP1を算出する。ピーク探索部751は、フーリエ変換部741によって算出されたパワースペクトルP1の中に現れるピークを探索し、各ピーク位置に対応する膜厚を取得する。
(もっと読む)
糸速度依存パラメータ測定方法

【課題】糸速度依存パラメータを非衝突的に測定する方法である、相関測定方法は特に高い糸速度を測定する場合に多大のコストを必要とするため、これに代わる測定方法を提供する。
【解決手段】糸3に光ビーム2を投射(geworfen)し、そして、散乱によって少なくとも第1光波4を拡散(gestreut)し、検出器6において第1光波4を第2光波5と重畳(Ueberlagerung)させ、第1及び第2光波4、5の周波数間のドップラー偏移(Dopplerverschiebung)を測定する、糸3の速度依存パラメータ測定方法により、解決することができる。
(もっと読む)
テラヘルツ波に関する情報を取得するための装置及び方法
【課題】 設定された領域におけるサンプルを透過あるいは反射したテラヘルツ波の時間波形を取得することができる装置の提供。
【解決手段】 14は、発生部12が発生させたテラヘルツ波10がサンプル19を透過したテラヘルツ波11を検出するための検出部13が検出するタイミングを変化させるための遅延部である。
15は、前記遅延部104を用いて得る、前記透過したテラヘルツ波の時間波形を取得するための波形取得部である。
前記記憶部16が予め記憶しているサンプル19に関する情報に基づいて設定される前記時間波形に関する領域で、前記検出部13が前記透過したテラヘルツ波を検出するように前記遅延部14、24を制御する。
そして、前記領域における前記透過したテラヘルツ波の時間波形を取得する。
(もっと読む)
大きさ推定システム及び形状推定システム
【課題】位置が特定されていないセンサの検出結果により、検出対象の形状が分からない場合に大きさの推定を可能とする大きさ推定装置と、検出対象の大きさが分かっている場合に形状検出を可能とする形状推定装置を提供する。
【解決手段】本発明の大きさ推定システムは、複数個のセンサと1つのセンタサーバから構成されており、検出対象の大きさを推定する大きさ推定システムであり、センサが、検出対象における検出した検出部分のセンシング面積を測定する検出手段と、検出手段による検出データを処理し、レポート化する処理手段と、測定手段によるレポートをセンタサーバに通知する通信手段とを有し、センタサーバが、複数のセンサから通知を受信する送受信手段と、複数のセンサからの通知に各々含まれる検出部分のセンシング面積の情報を用いた統計処理を行い、検出対象の大きさを判定する判定手段とを有する。
(もっと読む)
観察物体の物理量を検出するための装置およびこれを用いた検出方法
【課題】 観察物体の位相変化量等を微分干渉顕微鏡により得た微分干渉画像から短時間で検出する装置を提供する。
【解決手段】 光源と、光源からの光を2つの偏光成分に分離し観察物体に導く照明光学系と、照明光学系内で分離された2つの偏光成分を再構成し観察物体の像を形成する結像光学系を有する微分干渉顕微鏡と、2つの偏光成分のリターデーション量を変化させる手段と、リターデーション量を検出する手段と、観察物体の像を撮像する手段を備え、リターデーション量が等しく符号の異なる観察物体の2つの微分干渉像を撮像手段で撮像する検出装置において、2つの微分干渉像の画像において夫々対応する画素毎に差演算及び和演算を行って差画像情報と和画像情報を取得し、以下の式を用いて観察物体面上の位相量を検出する演算手段を備える。
∂Φ(x,y)/∂r=k・{(1−cosθ)・D(x,y)}
/{2sinθ・S(x,y)}
(もっと読む)
周期パターン照明及びTDIによる結像測定システム
構造化照明、モアレ手法、3D結像、及び3D計測等のパターン化照明による高スループット結像及び測定のためのパターン化TDIセンサーであって、前記パターン化TDIセンサーは、ピクセル配列を備え、それぞれのピクセルは、前記ピクセル配列にわたって周期パターンに従って変化するそれぞれの光感度を有する。物体の測定においては、前記物体にわたって周期的に変化する照明によって物体を走査し、反復長が照明の反復長に一致するパターン化TDIセンサーによって物体を結像し、TDIセンサーの出力信号を解析することによって物体の高さや画像等の情報を抽出する。  (もっと読む)
(もっと読む)
非接触測定を行う装置および方法
対象物体を検査するための非接触法および装置。第1の透視位置から撮った、光学的パターンが投影される前記対象物体の少なくとも1つの第1の画像が得られる。第1の透視位置と異なる第2の透視位置から撮った、光学的パターンが投影される対象物体の少なくとも1つの第2の画像が得られる。次いで、少なくとも1つの第1および第2の画像のそれぞれの中の少なくとも1つの共通の対象物体特徴が、少なくとも1つの第1および第2の画像内に画像化されているような光学的パターンの不規則性に基づいて決定される。 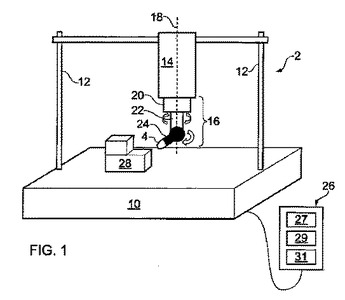 (もっと読む)
(もっと読む)
位相解析測定を行う装置および方法
位相解析を用いて対象物体を検査するための非接触法および装置。プロジェクタは、検査される対象物体の表面上に光学的パターンを投影する。次いで、光学的パターンが投影される表面の少なくとも第1の画像および第2の画像を得る。表面上の光学的パターンの位相は、対象物体に相対的にプロジェクタを移動することによって前記第1の画像と第2の画像との間で変化される。 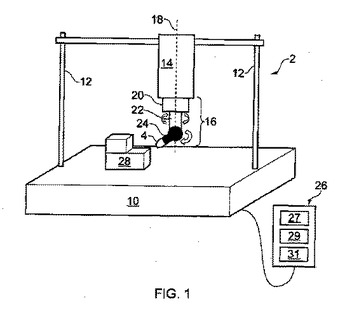 (もっと読む)
(もっと読む)
スジムラ評価装置、スジムラ評価方法、スジムラ評価プログラム、記録媒体及びカラーフィルタの製造方法
【課題】画像データから特定周期スジムラの出現傾向の評価を適切に行えるスジムラ評価装置を提供する。
【解決手段】本発明のスジムラ評価装置100は、カラーフィルタの光照射されている評価対象面を撮像して得られた撮像画像データから当該評価対象面に発生している周期性を有するスジムラを評価する指標となる評価データを生成する評価データ生成部120を備える。評価データ生成部120は、撮像画像データに含まれる光分布情報に対して、スジムラの出現方向のベクトルを含む方向を投影方向として一次元投影処理を行う一次元投影処理部121と、一次元投影処理された光分布情報からパワースペクトルを算出するパワースペクトル算出部122と、算出されたパワースペクトルから、予め設定した周期の区間積分値を算出する積分処理部123と、算出された区間積分値中に含まれるノイズ成分を除去するノイズ成分除去部124とを有している。
(もっと読む)
校正用ターゲット、校正支援装置、校正支援方法、および校正支援プログラム
【課題】基準面と撮像ユニットとの位置関係の校正を容易に行う。
【解決手段】基準面に載置された撮影対象の撮影を行う撮像ユニット15に関して、撮像ユニット15の光軸方向を校正するための校正用ターゲット20である。校正用ターゲット20は、基準面との接触面となる底面と、交線が底面と平行である2つの傾斜面とを有している。2つの傾斜面には、底面に正射影したパタンが同じである校正用パタンがそれぞれ形成されている。撮像ユニット15によって撮影された校正用ターゲット20の撮影画像を、画像解析・処理ユニット16は、2つの傾斜面にそれぞれ形成された2つの校正用パタンを認識し、認識した2つの校正用パタンの寸法を算出し、算出した2つの校正用パタンの寸法に基づいて、校正のための校正情報を作成する。
(もっと読む)
検査方法および装置、リソグラフィ装置、リソグラフィ処理セルおよびデバイス製造方法
【課題】パターンの画像を測定しているパターン付き基板上の位置を正確に決定する方法および装置を提供することである。
【解決手段】基板特性の測定方法は、放射ビームBがマスクMAを通過するように構成されたパターン付きマスクを生成してパターンを取得すること、マスクを使用してパターンが与えられたパターン付き放射ビームでの基板Wの照射をシミュレーションしてシミュレーションパターンを獲得すること、パターニングの誤差が発生しやすいシミュレーションパターンの少なくとも1つの位置を決定すること、および、リソグラフィプロセスを使用して前記パターン付き放射ビームで前記基板を照射することを含む。方法は、パターニングの誤差が発生しやすいとして決定された基板上のパターンの少なくとも1つの位置の少なくとも1つの特性の精度を測定し、測定に従ってリソグラフィプロセスを調整することも含む。
(もっと読む)
表面性状評価方法およびコンクリート表面診断方法
【課題】水利的機能の確保や水理的機能および構造的機能の回復・向上などの目的に対応した効率的な補修を実施する。
【解決手段】コンクリート表面の劣化状態を診断するコンクリート表面診断方法であって、塑性を有すると共に一定時間特定の形状を保持する粘土を用いて、評価対象となるコンクリート表面の型取りを行なう工程と、前記型取りした粘土の表面形状を測定する工程と、前記測定結果を用いて評価指標値を算出する工程と、前記算出した評価指標値に基づいて、前記コンクリート表面の劣化状態を推定する工程と、を少なくとも含む。
(もっと読む)
搬送量推定装置
【課題】コンベアで搬送される搬送物の累計体積の推定精度を向上させることが可能な搬送量推定装置を提供する。
【解決手段】管理面Qを通過した搬送物Zの累計体積を推定する搬送量推定装置E1であって、最も外側に位置する二つの測線D1,Dkと計測対象面Pnとで囲まれた計測領域Kの実面積を取得する面積取得手段31と、管理面Qを通過した搬送物Zの通過体積を取得する体積取得手段33と、を備えており、面積取得手段31は、空荷状態であると判定されたときには、空荷状態を想定して規定した仮想距離dHを用いて算出した計測領域Kの面積を実面積として取得し、空荷状態でないと判定されたときには、距離取得手段11で取得された距離dnを用いて算出した計測領域Kの面積を実面積として取得する。
(もっと読む)
物体認識装置および物体認識方法
【課題】距離画像を使用して高速かつ高精度に物体の種類や向き、数等を識別することができる物体認識装置を提供すること。
【解決手段】物体認識装置は、レンジファインダ等の対象物の表面の距離画像を取得する手段、設定された単位長情報に基づいて距離画像から離散化距離画像データを生成する手段、離散化距離画像データから立体高次局所自己相関によって特徴データを抽出する手段、予め学習した情報に基づいて多変量解析を行って、特徴データから対象物の種類、姿勢、個数の内の少なくとも1つを判定する手段を備える。対象物の切り出しやマッチング処理を行わずに対象物を認識するので、計算量が少なく、実時間処理が可能である。また、物体の種類と共に個数や姿勢(向き)も判定可能である。
(もっと読む)
ドリル検査装置、ドリル検査方法、およびそのプログラム
【課題】ドリルの研磨や破棄のタイミングをバラツキなく判断することは難しい。
【解決手段】撮像部20は、ドリルの刃先を回転軸に沿う方向に撮像する。測定部34は、撮像部20により撮像された画像内の刃先領域の形状情報を測定する。記憶部36は、ドリルのライフサイクル上の研磨回数を反映させたステージごとに、そのドリルの刃先領域の形状情報の参照データを保持する。判定部38は、測定部34により測定された形状情報から、ドリルの刃先の状態を判定する。たとえば、測定部34により測定された形状情報と、記憶部36に保持されたステージごとの参照データを照合することにより、検査対象のドリルが該当するステージを特定する。
(もっと読む)
モーショントラッカ装置
【課題】 頭部装着型表示装置付ヘルメット等の対象物に取り付けられた3個以上のLED等の光学マーカーのそれぞれの現在位置を識別する際に、各光学マーカーを確実に識別することができるモーショントラッカ装置を提供する。
【解決手段】 3個以上の同一の光学マーカー7と、カメラ装置2と、光学マーカー位置情報算出部24と、カメラ装置2に対する対象物10の現在位置及び現在角度を含む相対情報を算出する相対情報算出部22とを備えるモーショントラッカ装置1であって、対象物10に作用する対象物角速度を検出する対象物角速度検出センサ4と、対象物角速度に基づいて、対象物10の角度移動量を算出する角度移動量算出部23と、光学マーカー位置情報及び角度移動量に基づいて、光学マーカー7の予想移動位置を推定する光学マーカー推定部26とを備え、光学マーカー位置情報算出部24は、光学マーカー7の予想移動位置に基づいて、3個以上の光学マーカー7をそれぞれ識別することを特徴とする。
(もっと読む)
三次元撮像
三次元目標物体の領域の画像を構築する画像データを提供する方法及び装置が開示される。本方法は、入射放射線を提供するステップと、少なくとも1つの検出器を介して、目標物体で散乱した放射線の強度を検出するステップと、目標物体に対して入射放射線を再位置決めするステップと、続けて、目標物体で散乱した放射線の強度を検出するステップと、3D物体の1つ又は複数の深さにおいて、入射放射線の少なくとも1つの特性の推定値を示すプローブ関数を求めるステップと、物体の1つ又は複数の領域の画像を、プローブ関数を使用して反復プロセスを介して構築することができる画像データを提供するステップとを含む。 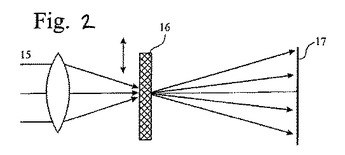 (もっと読む)
(もっと読む)
表面欠陥検査システム、方法及びプログラム
【課題】測定対象物の表面が平坦面でない場合にも表面欠陥の検出精度を高める。
【解決手段】周期的に変調された線状レーザ光の測定対象物2に対する照射位置を連続的にずらしながら、遅延積分型カメラ30により測定対象物2からの反射光を撮像して光切断画像を出力し、測定対象物2の表面欠陥を検出する表面欠陥検査システムであって、カメラ30で得られた光切断画像を順に配列することにより得られる縞画像の各位置における位相のずれを算出する位相算出部505と、位相算出部505で得られた位相のずれに基づいて位相のずれが不連続になっている位置を検出し、その検出した位置における位相のずれを繋ぐことにより位相のずれを連続化する位相連続化処理部506とを備え、位相連続化処理部506は、位相のずれを連続化する処理の後に、該連続化させた位相特性上における段差を検出して、その段差をなくす段差補正処理を更に施す。
(もっと読む)
表面特性の決定
【課題】本発明は、表面特性の定量測定のための方法を提供し、解析されるべき表面(8)の、多数の測定値を含んでいる空間的に分解された画像が評価される。
【解決手段】方法は、測定値によって特徴付けられ得る特定の物理的な特性を表す画像の表面積(A)を決定するために、測定値を解析するステップと、物理的な特性の結果値(I)を決定するステップであって、この結果値は、測定値を解析することによって決定された表面積(A)全体の物理的な特性の測定値に特有のものである、ステップと、を包含し、結果値に加えて、表面に特有のさらなる値(B)が決定され、このさらなる特徴値(B)は、結果値(I)またはこの結果値に依存する値と共に表示されることを特徴とする、方法。
(もっと読む)
141 - 160 / 250
[ Back to top ]