
Fターム[2F065QQ14]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の積分 (316)
Fターム[2F065QQ14]の下位に属するFターム
移動平均 (66)
Fターム[2F065QQ14]に分類される特許
201 - 220 / 250
物体の表面トポロジを再構成する方法
本発明は、物体2の表面部1の表面トポロジを再構成する方法に関する。表面プロファイルの勾配を表す測定値(勾配値)を取得する方法又は干渉法のような従来の方法は、ウエハのような広く平坦な物体の場合、限定された高さ解像度しか示さない。この問題を解消するために、物体の表面部がより小さな領域に細分化され、各々の領域から最適な装置パラメータで勾配値が得られる。それから、領域はともにつなぎ合わされ、3Dトポグラフィが再構成される。 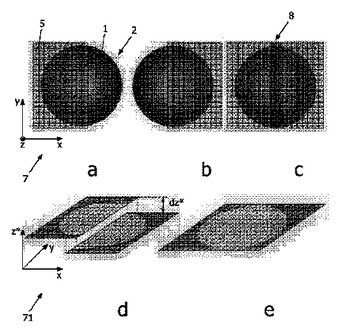 (もっと読む)
(もっと読む)
固体撮像装置及びその制御方法

【課題】 通常の画像出力機能の他に撮像信号を用いた各種演算処理を行うイメージセンサの小型化、低消費電力化、低コスト化、多画素化等を実現する。
【解決手段】 従来のイメージセンサのピクセル毎に保持していた演算回路をカラム毎に共有する。また、各ピクセルから画像信号を取り出す垂直信号線54の上下方向の信号伝送経路に、それぞれ異なる構成の信号処理回路を設け、画像出力の処理と演算処理とを別な回路ブロックで完全分離して行うことにより、実画像の高画質化を達成し、かつ演算処理にも最適な設計を可能とする。すなわち、画像出力側には、I−V変換回路部44、CDS回路部45等を設ける。また、演算処理側にはカレントミラー回路部46、アナログメモリアレイ部47、コンパレータ部50、バイアス回路部51、データラッチ部52、出力データバス部53等を設ける。
(もっと読む)
木材の節探査方法及び装置及びプログラム

【課題】木材の節及び皮を持つ死節を確実に検出できるようにすること。
【解決手段】撮影手段8で木材を撮影し、画像処理手段1で前記撮影した木材の画像から画像の円形度を計算し、該計算した円形度の大きいものを節として検出する。また、画像処理手段1で前記撮影した木材の画像から節の部分の画像を切り出し、該切り出した部分での各画素の色空間から所定の閾値で切り出した部分を黒変部とし、該黒変部の画素数の前記切り出した節の部分の画素数に対する割合が大きいものを死節と決定する。
(もっと読む)
空間情報検出装置
【課題】複数台が対象空間を共通にしている場合でも、それぞれ対象空間の空間情報を独立して検出することができる空間情報検出装置を提供する。
【解決手段】空間情報検出装置は、対象空間に投光する発光源2と、発光源2から対象空間に投光する光の強度を変調するように発光源2に所定の変調周波数の変調信号を与える発光制御部3と、対象空間からの光を受光し受光光量に応じた電荷を生成する感光部11を有した光検出素子1と、光検出素子1の出力から対象空間に存在する物体Obまでの距離を求める距離演算部4とを備える。距離演算部4は、光検出素子1が受光する環境光成分のうち変動成分を相殺するように変調信号に同期する特定の位相区間の差分の積算値を所定の積分時間において求め、当該積算値を用いて物体Obまでの距離を求める。
(もっと読む)
光学式距離測定装置および電子機器
【課題】 安価かつ小型で消費電力が小さい光学式距離測定装置およびその光学式距離測定装置を有する電子機器を提供すること。
【解決手段】 発振器1で発光信号Aが生成され、生成された発光信号Aが発光素子2へ送られて、発光信号Aに同期して発光素子2から光が発せられる。発光素子2から発せられて被検出物13で反射した光は、受光素子3に入射して電流信号に変換され、受光信号Bとなる。受光信号Bはプリアンプ4で電圧信号に変換されてミキサ部7に入力する。発振器1から発光信号Aが直接ミキサ部7に入力され、先の受光信号Bと論理演算によって合成される。上記ミキサ部7の合成信号Cは、積分器11で距離に比例する積分信号Dに変換され、判定部12で、被検出物までの距離が算出される。
(もっと読む)
視覚情報処理システム及びその視覚情報処理方法
【課題】光空間変調素子とイメージャとを組み合わせることによって、従来では得られることのなかった新たな視覚情報処理を実現可能な視覚情報処理システムを提供する。
【解決手段】本発明に係る視覚情報処理システムは、光源からの放射光を所定の光パターンに基づいて変調する光空間変調素子を有し、光パターンに基づいて変調された放射光を撮像対象物に照射する光パターン生成部と、光パターンが重畳された撮像対象物を撮像し、撮像対象物の特徴量を抽出する画像特徴抽出部とを備え、光パターンは、三角測量原理に基づいて前記撮像対象物の3次元情報を得ることができる複数の光パターンであると共に、画像特徴抽出部で抽出された特徴量に基づいて光パターンの種類及び数の少なくとも一方が適応制御される光パターンであることを特徴とする。
(もっと読む)
パターン検査方法および画像生成方法
【課題】パターン欠陥を短時間で精度良く検出できるパターン検査方法を提供すること。
【解決手段】フォトマスクのパターンを撮像して得られたセンサデータと、パターンの設計データを展開して得られた参照データとを比較して、パターンの欠陥を検査するパターン検査方法において、設計データから画素単位の二値または多値の諧調データを生成し、その諧調データに複数の演算を逐次実行することで、諧調データ上におけるパターンの角部が丸められ、且つパターンの頂部および底部の傾きが調整された第1処理データを生成する工程と、第1処理データに1つのカーネルフィルタを使用してフィルタ演算を1回実行することで、パターンが位相シフトパターンであるときにセンサデータ上に形成されるアンダーシュートが表現された第2処理データを一括生成する工程と、第2処理データに複数の演算を逐次実行することで、参照データを生成する工程とを具備する。
(もっと読む)
位置センシング装置及び位置センシング方法
【課題】 フェムト秒レーザー等を用いない低コストな位置センシング装置が強く望まれていた。
【解決手段】 そこで、本発明は物体の位置を検出するための装置であって、前記物体に連続する電磁波を照射するための照射部と、前記照射部から照射される電磁波のうち前記物体から反射される電磁波を検出するための検出部と、前記検出部で検出される情報から振幅強度の変化又は位相の変化を出力する出力部を備え、前記出力される情報をもとに前記物体の位置を検知する位置センシング装置を提供するものである。
(もっと読む)
孔内異物の検出方法及びその検出プログラム
【課題】 紡糸口金に穿設された吐出孔を通過する通過光を奥行き方向に沿って複数箇所で撮像して得た画像データ群から、正確かつ確実に孔内異物を判別する孔内異物の検出する。
【解決手段】 吐出孔の一方側から照射しされて該吐出孔を通過した光を吐出孔Hの奥行き方向に沿って被写界深度が異なる複数箇所において電荷結合素子カメラ(CCDカメラ)で光学的に画像を拡大してそれぞれ撮像し複数の画像データ群を取得し、取得した前記画像データ群に含まれる画素群の明暗の諧調を画像処理装置にそれぞれ記憶すると共に、予め設定した判別基準値を基にして各画像データに含まれる画素群を「明」と「暗」との何れかの値にそれぞれ振り分ける二値化処理を行い、二値化処理された各画像データから画像処理によって吐出孔の奥行き方向に沿って存在する孔内異物の存在を判別することを特徴とする孔内異物の検出方法とその検出プログラムである。
(もっと読む)
距離測定装置
【課題】 一つの撮像装置によって、撮像対象の物体と撮像装置との距離を簡易な画像処理で検出する。
【解決手段】 距離測定装置10Aは、位置、撮像方向の角度、撮像範囲が既知の撮像装置11と、撮像装置11からの映像情報を基準画像として記憶保持する基準画像記憶装置12と、撮像装置11からの新たな映像情報と基準画像記憶装置12からの基準画像の映像情報をの差分絶対値を映像情報1ライン毎に加算して1ライン毎の総計を出力する差分画像合算装置13と、1画面のライン数分の差分画像合算データから対象判定閾値以上の値を有する最大のライン番号Yを出力する第1ライン演算器14と、最大ライン番号Yをアドレスとして撮像対象の物体と撮像位置との距離を示す距離データを算出する距離テーブルメモリ15とを有している。
(もっと読む)
光画像計測装置
【課題】 計測開始要求に対応して迅速に画像計測を開始でき、計測領域決定時にピントの合っていた領域の画像計測を好適に行える光画像計測装置を提供する。
【解決手段】 観察光Mが観察用CCDカメラ23に合焦されているとき、計測用CCDカメラ21、22は、観察物点Pの位置から装置側に距離dだけ離れた位置に計測物点Qを有するように配置されている。計測開始スイッチ60が操作されたことに対応して、干渉光移動ステージ50が、計測物点Qを観察物点Pの位置の方向に移動させるように光路長差を変更する。距離dは、静止した干渉計移動ステージ50を一定速度まで加速するのに必要な距離以上とされている。それにより、被測定物体Oの画像計測の開始要求に対応して迅速に画像計測を開始でき、計測領域決定時にピントの合っていた領域、すなわち観察物点の位置の画像計測を行うことができる。
(もっと読む)
画像入力装置および画像入力方法
【課題】微小な凹凸と濃度変化部分の双方において、より高感度な検出を行うことができる画像入力装置を提供する。
【解決手段】被測定物の表面で反射された反射光を二次元に配列した光学素子により検出し、被測定物の二次元画像を撮影する撮像部101と、撮像部101が撮影した二次元画像における反射光の分布に基づき、予め定められた画素選択条件を満たす部分画像を二次元画像から取得する部分画像取得部102と、部分画像取得部102により連続して取得された複数の部分画像を、被測定物の移動速度に基づいて算出した画素数分ずらして加算し、ライン画像を算出するライン画像算出部103と、ライン画像算出部103が算出したライン画像を主走査画像として副走査し被測定物の二次元画像を取得する画像取得部104と、を備えた。
(もっと読む)
棒状体の測定方法
【課題】 リニアイメージセンサの出力から微小径の棒状体の縁部における単色光のフレネル回折パターンを解析して前記棒状体の径を求めるに際し、その誤検出を確実に防ぐことのできる棒状体の測定方法を提供する。
【解決手段】 光路中に位置付けられた棒状体により受光量が低下したリニアイメージセンサにおける受光セルの情報からその遮光領域の幅を求めると共に、上記遮光領域での受光量の総和の情報を求め、この受光量の総和の情報と、この情報に関して予め前記遮光領域の幅に応じて定めた閾値とを比較して、前記遮光領域に前記棒状体の径方向のエッジにおける回折光だけが回り込んでいる計測条件が成立しているか否かを判定する。
(もっと読む)
三次元センサを用いるエレベータエリアの監視
本発明は、三次元画像情報を取得するための3D半導体センサ79を用いて、エレベータエリアを監視するための装置に関する。半導体センサ79は、監視されるべきエレベータエリアが、光源によって照光される領域に配置されるようにして取り付けられる光源と、反射光を受光するようにして取り付けられるセンサ群と、電気的信号を画像情報に変換するための処理チップとを備えている。装置には、三次元画像情報を供給するために半導体センサ79に接続されている処理ユニット80も設けられている。処理ユニット80は、監視されるべきエレベータエリアの状態をあらわす状態情報を得るために、画像情報を処理する。 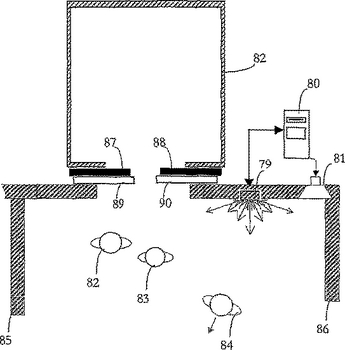 (もっと読む)
(もっと読む)
溶接位置検出装置
【課題】 亜鉛メッキ鋼板等の変形のし難い被溶接部材にスポット溶接を施した場合にも、撮像画像から溶接部(スポット痕)の位置を適切に検出することのできる溶接位置検出装置を提供する。
【解決手段】 本願発明の溶接位置検出装置は、スポット溶接が施されたワークWのスポット痕Sの位置を検出するためのものであって、スポット痕Sに対して光を照射するための照明装置9と、スポット痕Sを撮像する撮像装置8と、撮像装置8によって撮像されたスポット痕Sの撮像画像に基づいて、ワークWのスポット痕Sの位置を検出する位置検出制御装置3と、を備え、照明装置9は、ワークWの表面に対して5°〜45°の角度でスポット痕Sを照明する位置に配置され、撮像装置8は、スポット痕Sを挟む照明装置9と対向する側であって、ワークWの表面に対して5°〜45°の角度方向からスポット痕Sを撮像する位置に配置されている。
(もっと読む)
光電センサ及びそのヘッド部
【課題】 異なる用途に使用する光電センサのアンプ部を共通化することができる光電センサ及びその距離測定用ヘッド部を提供する。
【解決手段】 光電センサは、PSD13の両端に出力された複数の受光信号を距離測定用ヘッド部10部のヘッド側CPU15が受けると、PSD13上の受光位置に応じた幅のパルス信号を出力する。そして、この受光位置に応じた幅のパルス信号を積分して、受光位置に応じた波高値のパルス信号とし、FET17のオフによりアンプ部20のサンプルホールド回路21に出力する。
(もっと読む)
位置検出装置、位置検出方法及び位置検出プログラム
【課題】 一の撮影手段を用いて簡略な検出処理により、人間のように様々な高さを有する物体の2次元位置を検出することができる位置検出装置を提供する。
【解決手段】 ビデオカメラ11は、人間を撮影して2次元画像を取得し、投影部12は、取得された2次元画像から人物領域を抽出して3次元空間中の複数の水平面上に投影し、積分部13は、各水平面上に投影された人物の写像を積分して積分値を算出し、検出部14は、算出された積分値のピークが位置する3次元空間中の水平位置を人間の位置として検出するとともに、このピークが位置する3次元空間中の水平位置に人間の写像が存在する最も高い水平面の高さを人間の高さとして検出する。
(もっと読む)
コイルばねの方向判別装置
【課題】 不等ピッチコイルばねの方向判別精度を高めること。
【解決手段】コイルばね1の径方向両側に、光センサ3の投光部3aおよび受光部3bを対向配置する。光センサ3をコイルばね1の軸線方向に相対移動させたときに受光部3bから得られる出力値をコイルばね1の軸線方向の位置と関連付けて記憶する記憶手段5と、記憶手段5に記憶された受光部3bの出力値とコイルばね1の軸線方向一端から当該出力値に対応するコイルばね1の軸線方向の位置までの距離を乗算した第1の乗算値をコイルばね1の軸線方向に積分した第1の積分値、および、記憶手段5に記憶された受光部3bの出力値とコイルばね1の軸線方向他端から当該出力値に対応するコイルばね1の軸線方向の位置までの距離を乗算した第2の乗算値をコイルばね1の軸線方向に積分した第2の積分値をそれぞれ演算する演算手段6と、第1の積分値と第2の積分値の大小関係を判別する判別手段7を設ける。判別手段7によって、コイルばね1の方向性を判別する。
(もっと読む)
円筒体検査装置および同装置の設備状態評価方法
【課題】円筒体検査装置の設備状態を高い精度で評価する。
【解決手段】円筒体の外表面を照明する照明と円筒体との間に配置したスリット体により、円筒体の表面に明暗縞を形成し、カメラによりこの明暗縞各部の明暗階調を検出する。明暗縞の複数の暗部の最低階調の変化の傾向をマスターデータと比較し、設備状態の良否を評価する。
(もっと読む)
形状測定装置
【課題】 撮像時の変調パターンが簡単に実現でき、この変調パターンの実装がし易く、且つ測定物体方面から戻る反射パルス光から距離(位相)決定を行うための単純で精度の高い形状測定装置を提供する。
【解決手段】 測定物体2に光パターンである照射パターンを照射する照射手段3と、前記測定物体2表面で反射された光パターンである撮像パターンを得る、前記照射手段3と光学的に同じ位置にある撮像手段4、5、6とを備え、前記撮像パターンから前記測定物体2の表面形状を計算する形状測定装置において、前記測定物体2は前記照射手段3から或る距離の範囲に存在し、前記照射手段3は角周波数ωで変調した或る強度の照射パターンを前記測定物体2に照射し、前記撮像手段4、5、6は、前記測定物体2表面で反射され照射と同じ経路を逆にたどって前記撮像手段4、5、6に戻る反射光を、角周波数ω、位相φdで変調を行った後に光量の時間平均を検知し、それにより前記測定物体2の距離Lを、複数の変調条件で得られた光量に基づいて求める。
(もっと読む)
201 - 220 / 250
[ Back to top ]