
Fターム[2F065QQ26]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の比較、減算 (4,276) | 比 (553)
Fターム[2F065QQ26]に分類される特許
541 - 553 / 553
画像処理による移動物体計測方法及び装置
【課題】計測誤差をより小さくする。
【解決手段】移動物体を撮像するビデオカメラ10から遠ざかる方向へ移動物体が移動するときには移動物体の略後端を代表点とし、ビデオカメラ10へ近づく方向に移動物体が移動するときには移動物体の略前端を代表点とし、代表点に関する物理量を計測する。移動物体の領域に対する相対位置を移動物体の代表点として予め定めておいてもよい。移動物体が他の移動物体と重なっていないと判定した場合には、移動物体の幾何学的重心を代表点として求め、移動物体が他の移動物体と重なっていることを検出した場合には、移動物体の動きベクトルに基づいて、重なりがないとしたときの幾何学的重心に相当する点を代表点として求めてもよい。
(もっと読む)
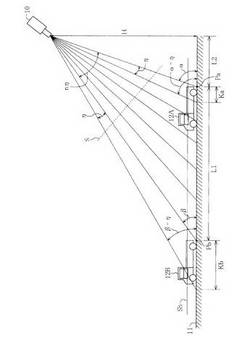
ホルダー内ピストンの傾斜測定装置

【課題】 ホルダーのピストンの傾斜などの諸測定量を光学式距離計を用いて、安全、連続かつ精度よく測定できるピストンの傾斜測定装置を提供し得ること。
【解決手段】 危険場所であるホルダーにおいて、距離計8をホルダー上部に、好ましくは反射シート10をピストン面に設置し、距離計の測定値を安全場所に設置している演算装置に伝送する。演算装置では、ピストン面の傾斜を測定すると共に、必要に応じて移動速度、移動距離、距離計良否判定などを実施し、左記諸量の表示、保存、他設備への伝送を行うことができるようにすること。
(もっと読む)
単眼視3次元位置計測装置および方法
【課題】 1台の撮影手段で撮影した一枚の画像情報のみに基づき、高速、かつ、少ない目印点数で3次元位置を計測する装置および方法を実現すること。
【解決手段】 対象物に4つの目印を付し、全ての目印の対について相互間距離を計測し、撮影手段で4つの目印の2次元画像を取得し、その2次元画像内での目印の座標を求め、その座標値に基づき撮影手段が各2つの目印をはさむ見込み角を計算し、3つの目印を選択して形成した3角形について、上記相互間距離と上記見込み角に依存する4次方程式を解いて撮影手段と各目印の間の距離の候補値の組を求め、他の三角形より得られる候補値と整合性がある値を選択して上記距離を定め、3次元位置を決める、単眼視3次元位置計測装置および方法とした。
(もっと読む)
情報装置、情報入力方法およびプログラム
【課題】ユーザの指等の指示物体の動きを迅速に検出して情報を入力することのできる情報装置および情報入力方法およびプログラムを提供する。
【解決手段】指の動きによって非接触に情報が入力される携帯電話装置50であって、絞り1と、絞り1の開口度を調節する絞り調節部4と、指を撮影する撮影部3と、絞り調節部4により開口度を異ならせてそれぞれの開口度において撮影部3で撮影した複数の指画像を比較することにより指が所定の距離範囲内にあるか否かを判定するキー接触検出部11と、指が所定の距離範囲内にあると判定された場合にいずれのキーが操作されたかを判定するキー操作判定部13とを備えた。
(もっと読む)
検出装置及びステージ装置
【課題】 本発明は高精度に可動されるステージの位置及び傾きを正確に検出することを課題とする。
【解決手段】 透過型検出装置22は、第1ステージ14の移動方向に延在形成された透明体角度格子30と、透明体角度格子30を垂直状態に保持する透明基板32と、透明体角度格子30に向けて複数の平行光を発光する発光部34と、透明体角度格子30を透過した複数の平行光を受光する受光部36とを有する。受光部36には9個のフォトダイオードが配置され、透明体角度格子30を透過した複数の平行光の受光強度分布を検出する。そして、受光部36で検出された強度分布の変化から固定側の透明体角度格子30に対する発光部34の位置及び傾き角度を検出することが可能になる。
(もっと読む)
人体検知装置及び衛生洗浄装置
【課題】 本発明の課題は、発光素子の経年劣化に影響を与えることなく発光量を補正する人体検知装置を提供する。
【解決手段】 本発明では、被検出体からの反射光を受光レンズで集光させて受光する一次元位置検出素子と、前記一次元位置検出素子から検出される長手方向の両端より検出する電流比で被検出体までの距離を演算する距離演算手段とを備えた人体検知装置において、前記一次元位置検出素子の両端より検出する総電流量を測定する総電流量検出手段と、前記発光素子の周囲温度を検出する温度検出手段と前記発光素子の駆動電流量を可変する駆動電流設定手段とを有するとともに、前記駆動電流設定手段は、前記距離演算手段と前記総電流量検出手段と前記温度検出手段の出力を参照し、前記発光素子の駆動電流量を可変する。
(もっと読む)
光学式位置決め装置におけるスペックルサイジング及びセンサ寸法
一実施形態は、一連のフレームにおける光学的特徴の変位を判定することにより一表面に対するデータ入力装置の横方向変位を検知するための光学式変位センサに関するものである。該センサは、少なくともコヒーレント光源(306)、前記表面(304)の一部を照明するための照明用光学系(308)、イメージング用光学系(310)、及び周期的な距離を有する感光素子の第1のアレイ(302)を含む。照明手段及び検出器は、照明された前記表面の部分から反射された光の強度パターンを前記感光素子の第1のアレイ(302)上に生じさせるよう構成される。該強度パターンは、前記アレイ(302)の前記周期的な距離の0.5〜2倍の間の平均スペックル直径を有する複数のスペックルを含む。 (もっと読む)
導電性ローラの表面判別方法
【目的】 光の漏れ具合をデジタル画像処理することにより導電性ローラDRの表面状態を定量的に把握し、良否判定アルゴリズムを用いることにより導電性ローラDRの良否判定を正確に行うことを可能とし、さらに検査員の画像注視により制限があった検査数量を増加させることが可能な表面判別方法を提供する。
【構成】 検査ローラ18及び導電性ローラDRの転接部に光りを照射し、転接部における光り漏れ具合をCCDカメラ28により撮影する。CCDカメラ28により撮影された光り漏れ部の画像データを信号処理装置30へ送出する。信号処理部30では、画像変換部31で光り漏れ部の画像をデジタル画像情報に変換し、画像処理部32で光り漏れ部の幅および高さを画素数表現で計測し、良否判定処理部33で幅及び高さの画素数データと良否判定アルゴリズムにより、導電性ローラDRの表面状態の判別を行う。これにより、検査員が画像表示装置を注視することなく、導電性ローラDRの表面状態の良否を判定することが可能となる。
(もっと読む)
光ディスクの厚さ測定方法
【課題】 波長による屈折率の変化、つまり波長の関数で屈折率を反映したスペクトルを高速フーリエ変換を通じて得られた干渉空間での反射光のピーク値の位置を通じて、速やかな分析速度および高精密度を有した光ディスクの厚さ測定方法を提供すること。
【解決手段】 光の波長の長さによる反射光の強度を波長別スペクトルデータとして検出する段階と、前記検出された波長別スペクトルデータを波長の関数として屈折率を反映したスペクトル値に変換処理する段階と、前記変換処理された値を高速フーリエ変換を通じて光ディスクの厚さを表す間接空間の長さに変換処理して反射光の強度がピーク値を有する位置をそれぞれスペーサーレイヤーおよびカバーレイヤーの厚さとして検出する段階とを含むことを特徴とする。
(もっと読む)
ビームプロファイル検証方法
【課題】 ビームの光量データを関数によって表現することでビームのプロファイルを高解像で検出するとともに、複数のビームが重畳している状態でも個々のビームのプロファイルを検証することが可能なビームプロファイル検証方法を提供する。
【解決手段】 画像形成装置の書込み光学系によって出射されるビームを受光する受光工程と、受光されたビームのビーム情報を格納するビーム情報格納工程と、格納されたビーム情報をビームの光量の分布を表す光量データ41に処理するとともに、光量データ41を近似する関数を光量データ41に収束するように関数を処理するビーム情報処理工程と、ビーム情報処理工程によって処理されることで光量データ41に収束した関数に基づいてビームのプロファイルを検出するビーム情報検出工程とを備える。
(もっと読む)
多層プリント配線板と、その層間ズレの測定方法
【課題】 多層プリント配線板の内層の各導体層の変形量を観測、記録する。
【解決手段】 多層プリント配線板60の内層用の両面配線板61の表裏の導体層に中実ガイドマーク22と中空ガイドマーク23が形成され、例えば、中実ガイドマーク22−1bに、隣接した導体層に設けられた中空ガイドマーク23−2aが同心に配置され、隣接した導体層毎に同心に配置された中実、中空ガイドマーク22、23を形成する。X線カメラの視野内に納まる外形のガイドマーク枠21内に、例えば3行3列に、同心の中実、中空ガイドマーク22(1a〜5a)、23(1b〜5b)の組が配されている。ガイドマーク群20は多層プリント配線板の、たとえば4隅に配置され、1個のガイドマーク群は1回のX線照射で枠内のガイドマーク全ての像を取り込み、それらの座標値が計算される。4個のガイドマーク群内のガイドマークの座標値から、各導体層に形成された配線用パターンの変形量が計算され、結果を記録できる。
(もっと読む)
計測器の指針検査用画像処理方法
【課題】 照明変化や背景変化等の影響が及びにくくして、メータの指針の検査が容易にできるようにした。
【解決手段】 電流計や電圧計等の計測器本体11はX,Y移動機構に載置されて横方向X、縦方向Yに移動されるように構成される。計測器本体11の指針部分と目盛りなどの背景部分は、カラービデオカメラ12で観測撮影され、撮影されたビデオ信号は画像処理装置13に入力される。この画像処理装置13では、入力されたビデオ信号から背景部分や指針部分の画像処理が行われる。画像処理装置13で処理された画像処理信号は、色抽出部14に入力される。この色抽出部14では、指針部分と背景部分との識別化をUCS色度図と呼ばれる色表現方法を利用して行う。その後、指針部分だけを判定部15で判定して抽出する。
(もっと読む)
透明膜の段差の測定方法及び位相シフトマスクの作成方法
【課題】透明膜の段差の測定方法に関し、非接触、非破壊で且つ簡単な操作で高速、高精度に位相シフターの段差を測定すること。
【解決手段】第1の透明膜1の一部に形成された複数の第1の溝Sa1 ,…,San の段差量t1 ,….tn と該第1の溝Sa1 ,…,San からの反射光の偏光状態を示すパラメータの値との相関関係f1 を求めてデータベース化した後に、第2の透明膜42の一部に形成された第2の溝45の反射光の偏光状態を示すパラメータの第1の値を計測して、該第1の値と前記データベースの前記相関関係に基づいて該第2の溝45の第1の段差量を求める工程を含む。
(もっと読む)
541 - 553 / 553
[ Back to top ]