
Fターム[2F069AA04]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 位置;座標 (1,122) | 3次元 (390)
Fターム[2F069AA04]に分類される特許
201 - 220 / 390
製品検査装置、プログラム及びコンピュータ読み取り可能な記録媒体

【課題】製品の誤差及び誤差形状を容易に認識可能で、誤差を解消するための成形条件の見直しを容易にできる製品検査装置を提供する。
【解決手段】業種データに応じて業種別用途の確認を行う(S105)。業種別用途が樹脂成形品の場合(S105−樹脂成形品)には、判定手段14が、製品の表面の誤差と裏面の誤差を比較して誤差形状を判定する(S106)。選択手段15がソリューションデータ記録手段に記録された樹脂成形品用ソリューションデータベース9を選択し、その中から誤差形状に基づき適用すべきソリューションデータを選択し、表示手段16が適用すべきソリューションデータを表示する(S108)。
(もっと読む)
座標測定システム及び座標測定方法

【課題】エラーがなく、正確に測定でき、高速走査に耐えられる座標測定システムを提供する。
【解決手段】 回転軸(65)を中心にロータ(100)が回転することで、接触プローブ(15)の半径アーム(149)先端に針(123)を介して取り付けた接触ボール(120)が移動する座標測定システムについて、回転軸(65)のスライド移動とロータ(100)の回転の組み合わせから生じる経路に沿って、測定対象部品の測定地点の座標を接触ボール(120)の接触で測定するに際し、測定対象地点の接触ボール(120)の位置が、ロータ(100)の回転軸(65)に対して距離(r)だけオフセットしている。
(もっと読む)
情報処理装置、情報処理方法
【課題】 第1の座標変換情報、第2の座標変換情報の概略値を外部から入力することなく、より簡便かつ確実に校正情報を取得する為の技術を提供すること。
【解決手段】 校正情報算出部540は、第2の座標変換情報の複数の候補と、センサ計測値と、世界座標系におけるビデオカメラ100の位置及び姿勢とを用いて、第1の座標変換情報の候補を複数求める。そして、求めた複数の候補を統合して1つの第1の座標変換情報を求める。そして、第2の座標変換情報の候補と、第1の変換情報とを校正情報の初期値とし、校正情報を補正する為の繰り返し演算を行う。
(もっと読む)
3次元形状測定方法
【課題】 非接触式の3次元測定機におけるオフラインティーチングを実現し、作業者の測定工数を減らすことができる3次元形状測定方法を提供する。
【解決手段】 被測定物の3次元形状を非接触の3次元測定機1で測定する3次元形状測定方法であって、3次元(3D)CADにおいて、3次元測定機、被測定物、測定テーブル、測定治具の3DCADモデルを生成し、3次元測定機による測定範囲の3DCADモデル(測定範囲モデル)17を可視化して被測定物の3DCADモデル18に接触させて被測定物の3DCADモデル18上の測定範囲を着色して、測定位置を決定するオフラインティーチングを行う3次元形状測定方法である。
(もっと読む)
情報処理プログラムおよび情報処理装置
【課題】加速度センサを備える装置の姿勢を正確に算出する。
【解決手段】コントローラは、所定の撮像対象を撮像するための撮像手段と、当該入力装置に加わる加速度を検出する加速度検出手段とを備えている。ゲーム装置は、撮像手段によって撮像された撮像画像に含まれる撮像対象の画像に関する当該撮像画像内における傾きに基づいて、撮像手段の撮像方向を軸とした回転に関するコントローラの傾きを第1の傾きとして算出する。さらに、ゲーム装置は、加速度検出手段によって検出された加速度に基づいて、撮像方向と異なる方向を軸とした回転に関する傾きを第2の傾きとして算出する。ゲーム装置は、第1の傾きおよび第2の傾きをコントローラの姿勢として用いて所定の処理を実行する。
(もっと読む)
マスクパターン修正方法、フォトマスク製造方法、及び半導体装置の製造方法
【課題】走査型プローブ顕微鏡を用いた、寸法精度の高いマスクパターン修正方法を提供すること。
【解決手段】マスクパターン修正方法は、マスクパターン5のパターンエッジに黒欠陥が存在しない第1の部分の3次元情報を走査型プローブ顕微鏡を用いて取得するステップと、前記3次元情報に基づいてマスクパターン1のパターンエッジに黒欠陥2が存在する第2の部分を前記走査型プローブ顕微鏡のプローブを用いて修正を行うステップとを含む。
(もっと読む)
切削工具のパラメータを抽出するためのシステム及び方法
【課題】切削工具のパラメータを抽出するための方法を提供する。
【解決手段】本方法は、切削工具の表面に対応する点集団を有する測定データセットを取得する段階と、所定のセクションにおいて点集団を仮想的にスライスして該所定のセクション上の点セットを取得する段階とを含む。本方法はまた、点セットを通る複数の曲線を生成しかつ複数の曲線を最適化して最適化適合曲線を生成する段階と、最適化適合曲線から切削工具のパラメータを抽出する段階とを含む。さらに、提示した回転角投影法に基づいて、切削工具について複数のパラメータを抽出することができる。
(もっと読む)
座標測定器の動作制御
本発明は、例えば、最大速度、最大加速度、移動範囲の限界位置又は信号検出の限界値などの、動作中有効性を保持すべき少なくとも一つの動作パラメータを算定する、座標測定器(11)の動作を制御する方法に関する。座標測定器(11)の複数のコンポーネント(11,12,13,14,16,17,18,19)にそれぞれ動作パラメータの値、動作パラメータを算定するための規則及び動作パラメータを算定するための情報の中の一つ以上を割り当てる。複数のコンポーネント(11,12,13,14,16,17,18,19)に対して、動作パラメータの算定シーケンスを規定する。規定された算定シーケンスで動作パラメータを算定する際、各コンポーネント(11,12,13,14,16,17,18,19)に対して、次の措置を実施するものとして、シーケンスの第一の位置に有るコンポーネント(11)から開始し、i)動作パラメータの値がコンポーネント(11,12,13,14,16,17,18,19)に割り当てられている場合には、その値を動作に関して有効な動作パラメータの値として採用する措置、ii)動作パラメータの値がコンポーネント(11,12,13,14,16,17,18,19)に割り当てられていない場合には、それまでの有効な動作パラメータの値を引き続き有効なままとする措置、iii )シーケンス内に更に別のコンポーネント(12,13,14,16,17,18,19)が存在する場合、そのコンポーネントに関して前記の措置を繰り返す。  (もっと読む)
(もっと読む)
レンズの評価方法
【課題】レンズ単体で直線性、フォーカスずれ量等の長尺レンズの特性を評価するレンズの評価方法の提供。
【解決手段】レンズ測定面のXYZ測定データ点列とレンズ設計式の座標ずれ量から得たXYZ位置のずれ量と各XYZ軸周りの回転方向の各ABC方向の各チルトずれ量のうちの所定断面内での平行移動2方向とチルトの計3方向の位置ずれ量以外はレンズ全面での各位置と各チルトずれ量を用い、レンズ所定断面の測定データを所定ピッチで順次抽出した測定データを用いて計算してレンズ全面での各断面の平行移動量とチルトを求め、レンズ特性を評価する。
(もっと読む)
座標測定機のための改良された継ぎ手軸
本発明の1つの態様は、第1の端と、第2の端と、それらの間の複数の継ぎ合わせアームセグメントと、を有する関節付きアームを含む座標測定機器を含み、各アームセグメントは、少なくとも1つの位置トランスデューサを含む。アームの第2の端には、測定プローブアセンブリが結合される。測定プローブアセンブリは、アームの第2の端と測定プローブアセンブリのボディとの間に第1の回転軸を提供する第1の継ぎ手を含む。エンコーダは、エンコーダケースおよびエンコーダシャフトを含む。エンコーダケースは、ボディに剛結合されるエンコーダシャフトに対して第2の軸を中心に回転するように構成される。エンコーダシャフトにプローブが剛結合される。第2の軸を中心にプローブに対して回転するように、測定機器がエンコーダケースに結合される。 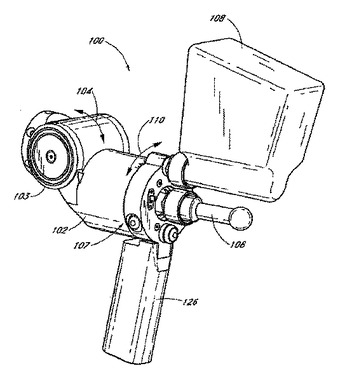 (もっと読む)
(もっと読む)
工具懸架台
【課題】互換性のある工具に対応する工具懸架台であって、従来の装置にあるような制約のないものを提案する。
【解決手段】
工具200を収納する為の工具懸架台20であり、各工具200は、その座標計測器の可動アームに取り外し可能なように連結可能で、工具200を収納する為の工具懸架部位があって、該懸架部位には、工具200を、第一の方向に沿ってその懸架部位の中に挿入することができ、その第一の方向に沿ってその懸架部位の中から取り除くことができるような複数のガイド60と、その工具200が第二の方向に向かう動きをするのを制限する複数の保持表面とがあり、そのような複数のガイド60と複数の保持表面とが、その工具200に傾きを生じさせるように配置されている。
(もっと読む)
外周長測定装置および断面積測定装置
【課題】高い精度で手軽に物体の外周長または断面積を測定する装置を提供する。
【解決手段】外周長測定装置10は、被測定物18が内側に配置される枠体12と、枠体12に取り付けられ、複数の既知の位置と被測定物18の外周上の複数の被測定点との距離を非接触式で測定する光学式距離センサ14とを有する。外周長測定装置10の中央演算処理装置は、既知の位置および光学式距離センサ14で測定された距離に基づいて被測定点の各々の座標を算出し、被測定点の各々の座標に基づいて被測定点同士の距離を判定し、被測定点同士の距離を合計する。
(もっと読む)
パーツの偏差の自動的画像化方法
本発明の実施形態は、パーツ上に偏差の画像を表示する方法に関する。当該パーツはスキャンすることができる。当該パーツ上の偏差の位置が特定される。偏差の画像を当該パーツ上に表示することができる。他の実施形態では、一以上の表面上にパーツの偏差の画像が表示されるパーツが提供される。 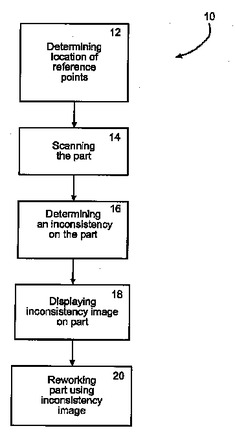 (もっと読む)
(もっと読む)
可搬型座標測定装置
可搬型座標測定装置(CMM)を開示する。CMMは向き合った第1および第2端部と、第1の関節アームに取り付けられた測定プローブとを有する、手動で位置決めができる関節アームを有してもよい。アームは複数の接合アーム部位を有してもよい。各アーム部位は位置信号を生じる少なくとも1つの位置トランスデューサを有してもよい。CMMは、位置信号をトランスデューサから受信し、選択された空間においてプローブの位置に対応するデジタル座標を提供する電子回路を有してもよい。少なくとも1本のアーム部位はその長さに沿って非直線的でもよい。  (もっと読む)
(もっと読む)
衝突防止装置
【課題】移動する装置が高速で動く場合であっても、移動する装置の筐体に発生する歪みによる影響が移動する装置内の機器に及びにくい衝突防止装置を提供することにある。
【解決手段】移動対象装置(3次元形状測定装置)30を移動手段によってX,Y,Z方向に移動させる装置に用いられる衝突防止装置において、移動対象装置30内のフレーム34を覆う筐体32と、測定対象物との衝突により筐体32に生じた歪みを検出する歪みセンサ36と、歪みセンサ36が検出した歪みが所定以上になった場合に移動手段を停止させる制御手段とを備え、筐体32とフレーム34とが、移動手段の機構部である接続ロッド28で接続されている。
(もっと読む)
基板取り扱いロボットの改善した校正方法
加工システムにおけるロボットを校正する方法(500)が提供される。方法は、距離センサ(214)をロボットのエンドエフェクタ(102)に脱着自在に結合すること(502)、及び距離センサをしてセンサ(214)から基板支持体(108)までの距離を計測させること(506)を含む。そして、その距離が選択されたしきい値を満たす又はその範囲内であるかどうかを判定する。距離が選択されたしきい値を満たす又はその範囲内であるときのロボットジョイント位置を記録する。 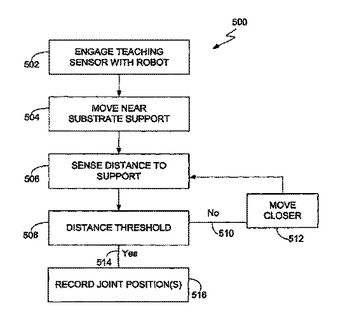 (もっと読む)
(もっと読む)
変形可能な幾何学的形態のプロセスと取得デバイス
【課題】変形可能材料によって規定された幾何学的形態の取得プロセスを提供する。
【解決手段】変形可能な幾何学的形態のプロセスおよび取得デバイス。センサ(1)のセットがこの形態(曲面または表面)上に置かれる。その状況で、それぞれのセンサがこのセンサの位置でのその形態の方向を表現する信号を供給し;その形態のモデルが選択され;その信号に基づいて、モデルのパラメータが決定され、センサを隔てる距離が測定され;そしてモデルと距離測定とのパラメータに基づいて、その形態の点の空間的配置が決定される。本発明は特に、機械加工、建具、石積み加工、および構造加工の分野に適用される。
(もっと読む)
情報処理方法、情報処理装置およびプログラム
【課題】 金型部品のような物品を検査する際、物品の実測により得られた点群データと、物品に関する規定の設計データとの関連付けに誤りが生じることを防止する。
【解決手段】 部品に関し規定された設計データの面の形状を表す特徴値と、部品の実測により得られた点群データについて算出した特徴値とを対比することにより、点群データと設計データの面とを関連付ける。
(もっと読む)
室内GPSを用いて隙間埋めパッドの取付位置及び厚さを計算する方法及び装置
【課題】平面度を精密に測定し、隙間埋めパッドの取付位置及び厚さを計算するために用いられる入力データとして平面度検出結果を入力する時間を短縮し、それによって作業時間を短縮する。
【解決手段】部材に取り付けられる隙間埋めパッドの取付位置及び厚さを計算する方法であって、部材の設計中に予め計算されている平面度計測点に関する情報を統合管理サーバから受信する第1ステップと、部材上の受信した平面度測定点の各々における3次元座標を計算する第2ステップと、計算した3次元座標に基づいて、部材に取り付けられる隙間埋めパッドの取付位置及び厚さを計算する第3ステップとを含み、第2ステップが、平面度測定点の各々において部材に室内GPSセンサを接触させるステップと、部材上に設置されている別の室内GPSを用いることによって、部材と接触している室内GPSセンサの端部における3次元座標を計算するステップとを含む方法が提供される。
(もっと読む)
表面感知デバイス
被加工物の表面を測定するための装置が説明される。装置は、座標位置決め機械のような機械(26)の可動アームに取り付けられ、そして、第1回転軸(1A)および第2回転軸(2A)まわりに回転でき、それら軸がそれぞれ第1モーター(M1)および第2モーター(M2)によって駆動される、支持体(7)を備える。装置は、付加的に、第3回転軸(4A)まわりに回転できる、被加工物の表面を感知するための表面感知デバイス(4)を備える。この第3回転軸(4A)は、第1回転軸(1A)に合わさることができ、合わされた場合、表面感知デバイス(4)に対する支持体(7)の回転は、表面感知デバイス(4)がホルダー(70)によって動かないように保持されるとき、第1モーター(M1)によって作動可能である。被加工物の表面を測定するための装置を使用するための方法は、また説明される。 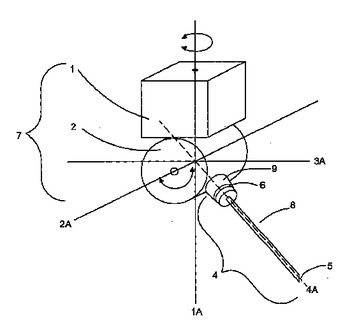 (もっと読む)
(もっと読む)
201 - 220 / 390
[ Back to top ]