
Fターム[2F069AA04]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 位置;座標 (1,122) | 3次元 (390)
Fターム[2F069AA04]に分類される特許
161 - 180 / 390
測定装置

【課題】長尺の断面直線形状や面形状の測定における水準器と多点法の利点だけを有効に使い、大面積の被測定面を迅速に高精度に測定できる測定装置を提供する。
【解決手段】被測定試料の置かれたステージと多点法プローブを保持するセンサホルダが互いに相対的に移動をして直線形状を走査測定する装置において、移動する側のセンサホルダまたはステージの走査方向の傾斜角を測定することの出来る水準器を備えていて、前記水準器によって走査移動の開始点と終了点での前記移動側物体の傾斜を測定することで、多点法プローブのゼロ点調整誤差をその場校正する。
(もっと読む)
超音波検査の走査計画のためのビジョン・システム
航空機の構成要素における複合材料の分析のためのシステムおよび方法である。構造化光測定を使用して対象物の3次元形状が判定され、次いで、レーザ超音波測定を行うときの走査数を最少にするために3次元形状が分析される。 (もっと読む)
物体の寸法取得を向上させる方法およびコンピュータプログラム
本発明は、物体の上に誘導される寸法測定デバイスによる物体の寸法取得の効率を向上させる方法であって、a)測定デバイスを物体の上に誘導して、その寸法を取得するステップと、b)取得した領域の分解能の指示をもたらすステップと、c)測定デバイスを、取得した領域の、所定の基準に基づいて不十分な分解能を指示する少なくとも一部分の上に再度誘導するステップと、d)取得した領域の分解能の指示を更新するステップと、e)所定の基準に基づいて十分な分解能が指示されるまで、ステップc)およびd)を繰り返すステップとを含み、それにより、物体の寸法を十分な分解能で効率的に取得する方法に関する。本発明は、そのためのコンピュータプログラムにも関する。  (もっと読む)
(もっと読む)
測定プログラム作成方法

【課題】被測定物を効率的に測定する。
【解決手段】本発明に係る方法は、外部から入力された被測定物およびこれを測定する第1の装置の形状を示す形状データから、被測定物および第1の装置を三次元で表現する三次元データを作成し、三次元データおよび第1の装置の動作条件を示す動作条件データを用いて、第1の装置を第2の装置上で仮想的に動作させることによって、検出機を用いて被測定物上の点の座標を示す座標データを取得し、座標データに基づいて測定プログラムを作成する。
(もっと読む)
ワークモデル生成方法、及びそのプログラム
【課題】演算時間の浪費を抑制し、且つ演算エラーを抑制したワークモデル生成方法、及びそのプログラムを提供する。
【解決手段】ワークモデル生成方法は、削り刃によって切削する経路を示す切削経路の外郭部である外郭切削経路を特定する外郭切削経路特定ステップと、外郭切削経路にて囲まれる面を含んで構成される所定厚みの切削ワークモデルを原ワークモデルから削除して加工ワークモデルを生成する加工ワークモデル生成ステップとを備える。このように、外郭切削経路にて囲まれる切削ワークモデルを原ワークモデルから削除して加工ワークモデルを生成するので、切削経路全体について切削ワークモデルを生成する必要がなく、演算時間の遅延を抑制することができる。
(もっと読む)
測定装置
【課題】装置の大型化を招くことなく、プローブ間で共用して測定できる測定範囲を維持できる測定装置を提供する。
【解決手段】被測定物を載置したXYステージと、複数種のプローブ9A,9B,9Cを有するプローブホルダ20と、XYステージとプローブホルダ20とを相対移動させる相対移動機構とを備える。プローブホルダ20には、傾斜状に配置された2本のガイドレール31,32を有し、少なくとも2つ以上のプローブ9A,9Bを、選択的にプローブ切替位置CPに対して位置決め可能かつ退避可能に進退させるプローブ切替機構30が設けられている。
(もっと読む)
中心位置検出治具及び三次元位置計測方法
【課題】締結具に形成された丸頭の中心位置を簡易かつ確実に検出すると共に、検出された中心位置の三次元位置を求めることができる位置検出治具及び三次元計測方法を提供する。
【解決手段】複数の被締結部材を締結する締結具に形成された丸頭の中心位置を検出する中心位置検出治具Aであって、台座平面10aと前記丸頭を前記丸頭の頭頂部が台座平面10aから突出するように収容可能な収容部10cとが形成された平行台座部本体10を備えると共に、平行台座部本体10を台座平面10aが前記被締結部材の被接触平面に対して平行となるように支持可能な本体支持部11を備える平行台座部1と、前記頭頂部の球面の一部が接触可能なテーパ孔が形成された検出部2と、前記テーパ孔のテーパ中心軸が前記台座平面10aと直交するように検出部2を平行台座部1に対して位置決め可能な連結部4とを備えることを特徴とする。
(もっと読む)
基準板を用いた3次元座標測定機
本発明は、被対象物に対する機械的誤差を実時間で補正しながら被対象物の表面座標を精密に測定することができる構造の基準板を用いた3次元座標測定機に関するもので、被対象物の上方に配置されてX軸ステージ軸上に左右に移動自在な状態で設置される測定部と、測定部の上方に配置されて固定される基準板とを備え測定部が、測定部と基準板との間の距離及び測定部と被対象物との間の距離を実時間で測定してX軸ステージの機械的誤差を補正して精密に測定するように設計されているものである。 (もっと読む)
金型加工データ変更方法
【課題】元の加工データを有効に利用して短時間に二番型用の加工データを得る。
【解決手段】成形品モデルに基づき、NC加工データを作製する。NC工作機械により、NC加工データに基づいて金型を作製する。金型の修正をして一番型を得る。計測器により、一番型を3次元的に計測して、メッシュデータ34を得る。NC加工データにおける加工工具16の移動経路20を示す複数箇所のデータから選択された箇所36で、加工端面16aがメッシュデータ34に対して点接触する位置まで加工工具16をZ方向に移動させる。元のNC加工データを、移動後の加工工具16の位置に基づいて変更する。
(もっと読む)
長軸部を有する物体の長軸部の先端座標と該物体の位置姿勢を定義する手段との3次元相対関係測定方法およびシステム
【課題】 3次元形状測定精度が通常の環境下でも、手術器具のように長軸部を有する物体の先端部と位置姿勢検出用の標識部との3次元相対関係を精度良く較正できる。
【解決手段】 被測定物体10の長軸部の先端部と第1標識部12との3次元相対関係測定方法であって、較正用物体20を被測定物体の長軸部の先端部に取付けるステップと、3次元形状測定装置により被測定物体および較正用物体の立体形状データ群を測定するステップと、立体形状データ群から第1標識部の位置および姿勢と第2標識部21,22,23の位置および立体形状とを算出するステップと、第2標識部の位置および立体形状と当接部と第2標識部との3次元相対関係とに基づいて当接部24の3次元座標を算出するステップと、第1標識部の位置および姿勢と当接部の3次元座標とに基づいて被測定物体の長軸部の先端部と第1標識部との3次元相対関係を算出するステップと、を有する。
(もっと読む)
接触式振動計およびこれを備えた表面性状測定装置
【課題】検査対象物に対して測定力一定制御の応答可能帯域よりも高い周波数までの振動を測定でき、質量効果の影響を低減できる接触式振動計およびこれを備えた表面性状測定装置を提供すること。
【解決手段】接触式振動計を備えた表面性状測定装置は、検査対象物との接触時に発生する測定力を検出し力検出信号として出力する力センサ1、力センサ1を検査対象物の振動に応じて移動させる駆動アクチュエータ133、力センサ1の位置変位情報を検出し変位信号として出力するスケール検出器135を有するプローブ130と、力検出信号を力フィードバック信号として力設定値と比較し、力フィードバック信号が力設定値に一致するように駆動アクチュエータ133を駆動させる力制御ループRFと、力検出信号および変位信号を合成して、検査対象物の振動振幅を取得する信号変換器240を備える。
(もっと読む)
電動式座標測定装置
座標測定装置(10)はハウジング(12)を有し、ハウジングは台(11)上に回転可能に支持され、水平方向並進アーム(15)と係合するキャリッジ(14)を乗せる垂直ピラー(13)が取付けられている。アームの各端のタレット(18、19)が、プローブ(22、23)に接続された回転体(20、21)を収容する。台の回転、キャリッジの垂直運動、アームの水平運動、及びプローブの回転が、ハウジング内のモータ(27、28、29、30)によって駆動される。モータの回転は、ケーブル及びプーリ組立体によってアームとキャリッジに伝達される。アームの横方向動作を制御するケーブル(43)は、キャリッジがピラーに沿って上下に移動する際にケーブルの一定長さ及び張力を維持するために、両端がアーム両端に位置する先端(16、17)に取り付けられ、キャリッジ上側及び下側に位置するピラーの部分に沿って上方及び下方に延在する。プローブを測定表面に対し一定角度で維持するようプローブの回転と基部の回転が協調される。 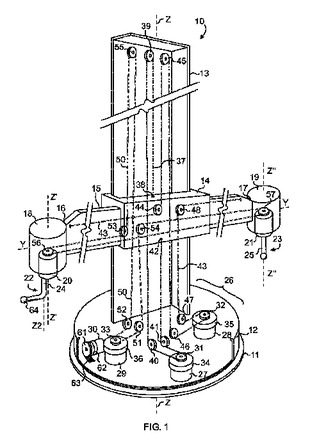 (もっと読む)
(もっと読む)
車両の積荷重心高推定装置
【課題】車両の姿勢や走行状態によらず、荷室内の積荷全体の重心高さを推定することが可能な積荷重心高推定装置の提供。
【解決手段】荷室60を有する車両に搭載される積荷重心高推定装置であって、レーザレーダ61とECUとを有する。レーザレーダ61は、荷室60が区画する荷室空間65内の積荷68の外面位置を、荷室空間65における座標として複数箇所で検出する。ECUは、レーザレーダ61が検出した複数の座標を用いて、荷室空間65内の積荷68全体の重心高を算出する。
(もっと読む)
三次元形状測定装置
【課題】接触式プローブ方式と非接触式プローブ方式の両方に対応し、被測定物によって簡単に切り替えることの可能な三次元形状測定装置を実現する。
【解決手段】接触式プローブ方式では、プローブ先端球109を被測定物110に接触させてZ軸アーム103によって倣い走査させ、第1、第2の基準ミラー102、111とプローブ軸ターゲットミラー114を用いて被測定物110の表面形状のデータを得る。非接触式プローブ方式においては、プローブ軸106及びプローブ軸ターゲットミラー114をZ軸アーム103から取り外して、第1、第2の基準ミラー102、111を用いた同じレーザ測長器によって被測定物110の表面形状のデータを得る。
(もっと読む)
重量のある加工物用の測定装置およびかかる測定装置用の加工物受け具
【課題】重量のある大きいワークピースを、その重量が測定精度に悪影響を及ぼすことなく、迅速で且つ信頼性の高いやり方で測定できるようにする、測定装置及びワークピース受け具を提供する。
【解決手段】ワークピース(2)測定用の測定装置(100)は、ワークピースを受け合うターンテーブル(1)と、ターンテーブル軸受を有するベースプレート(3)と、該ベースプレートが載置される基台(12)とを備えている。前記ターンテーブルは、当該ターンテーブルの下側に位置し、ターンテーブル軸受によってベースプレートに保持される、鉛直方向の軸(W)を備えている。前記ターンテーブル軸受は、ターンテーブルから離間した軸の底部端面(13)にアキシャル軸受(9)を備えている。前記軸は、ワークピースの重量(G)が、ターンテーブルによって受け止められるときは、ターンテーブル,軸及びアキシャル軸受を介して、基台に伝えられるように、アキシャル軸受に回転可能に保持されている。
(もっと読む)
物体認識装置およびロボット装置
【課題】距離データを用いて、対象物体の三次元的な位置姿勢を認識する。
【解決手段】物体の表面の三次元形状データを読み込み、物体の局所的な表面形状を表す特徴量を作成するモデル入力手段と、実際の環境を計測して距離データを取得し、物体の表面情報を作成するシーン計測手段と、シーン頂点の特徴量とモデル頂点の特徴量の類似度を算出し、それらシーン頂点とモデル頂点を対応点ペアとする対応点ペア作成手段と、対応点ペアを含むグループを作成し、対応点ペアとの関係で幾何学的一貫性を有する他の対応点ペアをグループに追加する処理を繰り返し、全ての対応点ペアを基準にグループを作成するグループ化手段と、グループに含まれる対応点ペアに基づき、モデルとシーンの対応点間の距離を最小にする座標変換式を算出し、座標変換式にしたがってモデルを移動させた結果をグループが示す物体の初期位置姿勢とする。
(もっと読む)
動き測定装置
【課題】コンパクトな構成で精度の高い動き測定を行う。
【解決手段】動き測定装置として機能するPCのプロセッサは、角速度センサおよび加速度センサから角速度および加速度をそれぞれ繰り返し取得し、取得された角速度を積算していく。そして、取得された加速度が加速度条件を満足したとき、積算結果をリセットする。
(もっと読む)
構成部品の実測データを調査する方法および装置
【課題】光学走査に由来する、構成部品の実測データを調査する方法を改良する。
【解決手段】構成部品1の実測データ2を、構成部品の実測データを調査する仮想座標測定機の仮想測定スタイラスを生成する接触式座標測定機用測定プログラム24を用いて調査する。
(もっと読む)
携帯型計測装置
携帯型計測装置のための方法及びシステムが記載される。本発明の1実施形態は、第1のリンクと、第1の自由度で移動するように動作可能な第1の連結器によって第1のリンクと連結される第1のプローブと、第2の自由度で移動するように動作可能な第2の連結器によって第1のリンクと連結される第2のプローブと、第1の連結器の動作と関係付けられる第1のセンサ信号を出力するように動作可能な第1のセンサと、第2の連結器の動作と関係付けられる第2のセンサ信号を出力するように動作可能な第2のセンサとを有する装置である。また、実施形態は、第1及び第2のセンサと連絡するプロセッサであって、第1のセンサ信号及び第2のセンサ信号を受信し、且つ少なくとも部分的に第1のセンサ信号及び第2のセンサ信号に基づいて第1のプローブと第2のプローブとの間の距離を判断するように動作可能なプロセッサを有する。  (もっと読む)
(もっと読む)
モーショントラッカ装置
【課題】 カメラ装置に設定された相対座標系に対する、頭部装着型表示装置付ヘルメット等の対象物の現在位置及び現在角度を、精度よく測定することができるモーショントラッカ装置を提供する。
【解決手段】 カメラ装置2と、光学マーカー7の現在位置である光学マーカー位置情報を算出する光学マーカー位置情報算出部24とを備えるモーショントラッカ装置1であって、対象物角速度センサ14と、対象物加速度センサ15と、対象物速度算出部25と、光学マーカー位置情報が、3個以上の光学マーカー7の現在位置を含むときには、第一相対情報算出部22で相対情報を算出し、光学マーカー位置情報が、1個以上3個未満の光学マーカー7の現在位置を含むときには、第二相対情報算出部23で相対情報を算出し、光学マーカー位置情報が、全く光学マーカーの現在位置を含まないときには、第三相対情報算出部26で相対情報を算出する切替部29とを備える。
(もっと読む)
161 - 180 / 390
[ Back to top ]