
Fターム[2F069AA04]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 位置;座標 (1,122) | 3次元 (390)
Fターム[2F069AA04]に分類される特許
101 - 120 / 390
測定装置
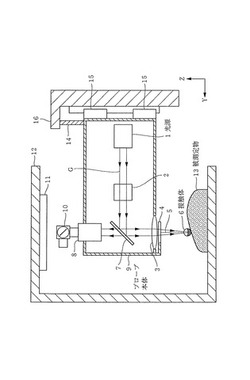
【課題】微粒子の接触体を用いて、矩形溝形状を有するマイクロマシン等の三次元形状を高精度で測定する。
【解決手段】接触体6は、可撓性の支持部材5と透明な固定部材4によってプローブ本体9に連結される。対物レンズ3にてレーザ光Gを集光させ、接触体6の底面に焦点を合わせて光放射圧によって接触体6を被測定物13の表面に接触させる。レーザ光Gを音響光学偏向器2によって偏向させることで、接触体6を任意の方向に振動させることができる。被測定物13が矩形溝形状を有する三次元構造体であっても、接触体6の振動方向を調整することで高精度な形状測定を行うことができる。
(もっと読む)
測定方法及び測定装置

【課題】簡便な方法で又簡単な装置で、移動体に設定された測定点、測定点間の距離の測定、或はGPS、IMU等の座標系に対するオフセット量を測定する。
【解決手段】移動体1に対して設定した座標系に対して所定の関係に測定棒6を設置し、該測定棒6の所定位置を移動体1が設置されている地面に転写すると共に測定対象物の測定点を地面に転写し、転写された前記所定位置と転写された前記測定点間の地面上での距離を測定し、距離測定結果に基づき測定点と前記測定棒6の地面上での関係を求め、得られた関係と前記座標系に対する測定棒6との関係から前記測定点の前記座標系に於ける水平座標面での位置を求める測定方法に係り、又前記所定位置と地面、前記測定点と地面との鉛直距離を測定し、前記座標系に於ける前記測定点の3次元位置を測定する。
(もっと読む)
フレキシブルセンサチューブ
【課題】瓦礫内探索ロボットが瓦礫に埋もれた人を発見した場合に、その位置を正確に把握することを目的とする。
【解決手段】瓦礫内探索ロボットが外部の空気コンプレッサーから空気圧チューブやCCDカメラ等の信号情報ケーブルで結ばれる必要性があることに鑑み、瓦礫内探索ロボットと外部の空気コンプレッサーとを結ぶ空気圧チューブやロボットに取り付けられたCCDカメラ等の信号情報ケーブルを多関節構造のチューブで覆い、各関節角をポテンショメータ等のセンサにより検出し、そのセンサの出力信号から多関節構造のチューブの全体形状を算出することにより、多関節構造のチューブの先端部に位置する瓦礫内探索ロボットの位置を同定する。
(もっと読む)
仮想対象に対する視覚的知覚位置の推定装置及び推定方法
【課題】ユーザが知覚する仮想対象の奥行位置を精度よく推定することができる推定装置を提供する。
【解決手段】ユーザが拡張現実環境に配された仮想対象に身体の部位又は器具を用いて仮想的に力を作用させる場合において、ユーザが知覚する仮想対象の奥行位置を推定する推定装置であって、前記ユーザが、前記仮想対象に対して前記部位又は器具を用いて仮想的に力を作用させるために動作させている場合に、当該動作の完了前の所定期間において、当該部位又は器具の位置、速度及び加速度のうちの少なくとも1つと時間とを計測する計測手段と、前記計測結果を所定の関数にあてはめることによって、前記部位又は器具の前記動作を表す関数を生成する生成手段と、前記生成された関数から前記部位又は器具の速度が前記作用の種類に応じて決定される値となる位置を計算し、当該計算された位置を前記ユーザが知覚する仮想対象の奥行位置として推定する推定手段を有する。
(もっと読む)
携帯端末
【課題】 空間的に離間した複数の撮影点で同じ対象物を被写体として撮影して撮影点間の相対位置を判定することができる携帯端末を提供する。
【解決手段】 被写体を撮影して静止画像を生成するカメラ16と、カメラ16の光軸の向き及び光軸を中心とする傾きを検出する姿勢検出部32と、静止画像から特徴点を抽出する特徴点抽出部24aと、静止画像内の特徴点に対応する被写体上の点及び当該静止画像の撮影が行われた撮影点間の距離を測定する距離測定部25と、第1撮影点で撮影された第1画像内の特徴点について測定された距離、第2撮影点で撮影された第2画像内の上記特徴点について測定された距離、並びに、第1撮影点及び第2撮影点でのカメラ16の向き及び傾きの各検出結果に基づいて、第1撮影点に対する第2撮影点の相対位置を判定する位置判定部26により構成される。
(もっと読む)
誤差伝播による出力データの精度評価方法
【課題】出力データの精度評価を、理論的で、簡単な計算で行え、計算量が少なく、収束計算を行う必要が無く、データ処理を行う多くのソフトウェアに適用可能であり、誤差の要因の分析、要因毎の大きさの比較等の多くの解析が可能となるようにする。
【解決手段】データ処理を入力データによって数値微分することで、データ処理のヤコビ行列Jを求める手順(ステップ110)と、入力データの持つ誤差の分散共分散を推定して、入力データの誤差行列Dを求める手順(ステップ120)と、前記ヤコビ行列J及び入力データの誤差行列Dより、出力データの持つ誤差の分散共分散を表す誤差行列Rを計算する手順(ステップ130)と、を含む。
(もっと読む)
自在曲面スキャナー
【課題】3次元曲面に対して簡易にかつ自在に曲面形状を型取りできる自在曲面スキャナーを提供する。
【解決手段】自在曲面スキャナー1は、その一面を3次元曲面に当てて曲面形状を型取りする板状定規部2と、板状定規部2に一定のピッチで取付けられる固定具3と、隣接する旋回板4との重複部10を有するように固定具3により板状定規部2の他面側に取付けられ、板面に明けられた長円孔5と、板面から突出するボルト6及びナット7とを有する旋回板4とを備え、旋回板4は、ボルト6が一方の側に隣接する旋回板4に明けられた長円孔5に差し込まれ、長円孔5が他方の側に隣接する旋回板4に取付けられたボルト6により差し込まれることで曲面形状を型取りする板状定規部2の動きに追従し、ナット7が締め込んで旋回板4の重複部10を相互に固定する。
(もっと読む)
機械の誤差同定方法およびプログラム
【課題】2つ以上の並進軸と1つ以上の回転軸を有する機械において、回転軸に関する幾何誤差と並進軸に関する幾何誤差とをほぼ同時に同定する。
【解決手段】回転軸であるC軸等を複数角度に割り出してターゲット球12を複数箇所に位置決めし、位置計測センサによりターゲット球12の3次元空間上の中心位置を計測し、計測された複数の中心位置計測値を円弧近似し、近似された円弧の1次もしくは2次成分等からC軸等の中心位置の誤差および傾き誤差並びに並進軸であるX軸,Y軸等の傾き誤差を算出する。
(もっと読む)
地図画像統合データベース生成システム及び地図画像統合データベース生成プログラム
【課題】移動体に固定された軸を使用せず、任意の方向にある撮影対象物の位置を取得することができる撮影対象位置特定装置、地図画像統合データベース生成装置及び撮影対象位置特定プログラムを提供する。
【解決手段】撮影装置10が撮影対象を撮影すると、制御装置16は、この画像情報とともに、撮影装置10のシャッターに同期あるいは非同期で角度距離計測器12が計測した撮影装置10の撮影位置と撮影対象との距離データと撮影装置10の撮影方向の方位角及び仰俯角を取得する。また、上記シャッターに同期あるいは非同期で、座標計測装置14から撮影装置10の撮影位置の座標情報を取得する。次に、制御装置16は、上記取得した、距離データ、方位角及び仰俯角のデータ及び座標情報のデータに基づいて、撮影対象の座標情報を演算する。また、撮影対象の画像情報及びその座標情報は、互いに関連付けて出力する。
(もっと読む)
定盤の製造方法、定盤および三次元測定機付き定盤
【課題】製造コストが安価で、長年の使用においても終始、盤面が高精密な平面度を維持確保しうる定盤の製造方法および定盤を提供する。
【解決手段】平坦面を有する親定盤7の盤面7aに、薄板状の小板3を複数枚並べて敷設することにより互いに隣接する小板3の集合体4を形成し、この小板集合体4の最外周を型枠で囲み、該型枠に所定高さまでコンクリート材を打ち込み、凝固したコンクリート材を基台とし、該基台2に小板集合体4を一体に設けた状態の子定盤を、小板集合体4を境にして親定盤7から分離して反転させ、表側に現れた小板集合体4表面にラッピング加工を施して平坦な盤面に形成することにより、親定盤7から子定盤を定盤として製造する。
(もっと読む)
手動式三次元測定装置、手動式三次元測定方法、及び手動式三次元測定用プログラム
【課題】手動式三次元測定の操作性及び正確性を向上させる。
【解決手段】手動式三次元測定装置は、被測定物2を測定する測定プローブ21と、測定プローブ21を三次元座標測定空間内において作業者が手動操作で移動させることができるように移動自在に支持する移動機構11〜13と、測定プローブ21の三次元座標空間内における位置情報を出力する位置情報出力部と、被測定物2の測定点情報を含むCAD情報を入力しこのCAD情報と測定プローブ21の位置情報とに基づいて測定プローブ21と測定点3との位置関係を逐次演算する位置演算部51と、位置演算部51の演算結果に基づいて測定プローブ21を測定点3で停止させるように移動機構11〜13による測定プローブ21の移動を規制する停止制御部53とを備える。
(もっと読む)
形状測定装置
【課題】凹状のゲージを用いた形状測定装置の校正の精度の低下を防止する。
【解決手段】形状測定装置のステージの上面に設けられているゲージは、形状測定装置の校正に用いる凹球面状の凹部と、凹部の底から垂直に突出するように設けられている送風部材52により構成される。送風部材52の送風部52Aの下面には、下面の外周に沿って、送風口61−1乃至61−nが所定の間隔で配置されている。形状測定装置の電源が投入されている間、常にこの送風口61−1乃至61−nから凹部の表面に向かって風が吹き出され、凹部の表面の埃などの異物が吹き飛ばされる。本発明は、例えば、被検物の3次元形状を測定する形状測定装置に適用できる。
(もっと読む)
関節プローブヘッド
【課題】関節プローブヘッドの回転軸をロックするためのブレーキを提供する。
【解決手段】支持体に取り付くための第1のマウントと、表面検出装置が取り付け可能な第2のマウントとを備え、第2のマウントが第1のマウントに対し一以上の軸回りに回転可能である関節プローブヘッドにおいて、第1のマウントに対する第2のマウントの一以上の軸回りの位置をロックするための少なくとも一以上の機械式ブレーキが設けられ、これにより、少なくとも一つの位置測定装置が、ロック位置において、第1のマウントに対する第2のマウントの一以上の軸回りの位置を決定すべく設けられる。
(もっと読む)
位置決定システム
本発明は、オブジェクト(2)の位置を決定するための位置決定システム(201)に関する。第一位置検出ユニット(205)が、送受信ユニット(203、214、216、217)によってオブジェクト(2)と基準位置に対して知られている転送位置との間で転送される放射に基づいて、オブジェクト(2)の第一の位置を検出する。第二位置検出ユニット(35)が、オブジェクト(2)の加速度および決定された前記第一の位置に基づいて第二の位置を検出する。出力ユニット(12)が、第一の位置および第二の位置の少なくとも一つを出力する。放射の転送が遮られても、第二の位置が出力ユニットによって出力されることができる。さらに、第一の位置が、第二の位置を決定するまたは第二の位置を更新するための初期値として使用されることができる。これはオブジェクトの位置決定の品質を改善する。 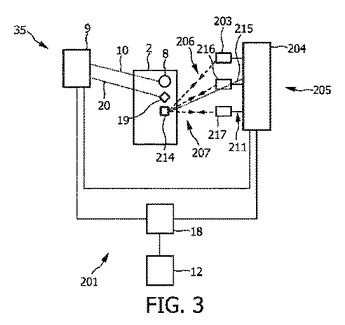 (もっと読む)
(もっと読む)
情報処理装置及びキャリブレーション処理方法
【課題】カメラ内部パラメータやカメラ間の相対位置姿勢が変化した場合に、仮想現実空間の表示が観察者へ悪影響を及ぼすことを未然に防ぐことを可能とする。
【解決手段】
主撮像装置と副撮像装置により現実空間を撮影して得られた画像に仮想画像を合成して立体視のための画像を提供する情報処理装置は、主撮像装置の位置姿勢を計測し、保持部により保持されている装置間位置姿勢情報と計測された主撮像装置の位置姿勢とに基づいて副撮像装置の位置姿勢を算出し、計測された主撮像装置の位置姿勢と算出された副撮像装置の位置姿勢と保持されている主撮像装置及び副撮像装置の内部パラメータとを用いて、主、副撮像装置のそれぞれから得られた画像に仮想画像を合成する。情報処理装置は、主、副撮像装置により撮像された画像に基づいて、保持されている装置間位置姿勢情報や内部パラメータの情報の正当性を判断し、不当と判断した場合には保持されている情報を校正する。
(もっと読む)
三次元道路中心線データの生成方法およびその装置
【課題】三次元走行軌跡をもとに三次元道路中心線データを自動生成する。
【解決手段】道路走行時に取得した位置センサの走行軌跡を、平面線形として生成された平面走行軌跡から、制御点検出手段は制御点を検出し、平面線形の生成において円弧検出手段が制御点に関連して円弧を検出し、縦断線形の生成においては放物線検出手段が放物線に近似させた円弧を検出し、平面線形の生成においては緩和曲線検出手段が円弧につながる緩和曲線を検出し、直線検出手段は前記検出した制御点、円弧、緩和曲線から直線を検出するから、これらの制御点、円弧、緩和曲線、直線をつないだ線を平面線形、縦断線形の中心線として滑らかに生成することができる。
(もっと読む)
三次元測定機
【課題】精度よく測定しなければならない小さい領域と、精度よく測定しなくてもよい大きな領域とが混在する大きな被測定物を適切に測定することができる安価な三次元測定機の提供。
【解決手段】三次元測定機1は、三次元測定機本体2と、制御装置3とを備える。三次元測定機本体2は、測定子を有するプローブ4と、プローブ4を駆動する駆動機構5とを備える。プローブ4は、測定子を駆動する駆動部43を備える。制御装置3は、第1測定部321と、第2測定部322とを備える。第1測定部321は、駆動部43にて駆動される測定子の移動量を測定する。第2測定部322は、プローブ4の移動量を測定する。また、第2測定部322による測定精度は、第1測定部321による測定精度より低い。
(もっと読む)
鋼材の変位表示方法及びシステム
【課題】鋼材の地中変位を、当該鋼材の挿入過程において、正確に把握することができ、しかも、装置コストが嵩まない鋼材の変位表示方法とする。
【解決手段】傾斜計11を用いて地中に挿入された鋼材2の傾斜情報を取得し、この傾斜情報を用いて鋼材2の変位を算出し、この算出変位を表示する方法であって、鋼材2の挿入に先立って、傾斜計11を鋼材先端部2aに固定し、鋼材2の挿入過程において、連続的に又は所定の深度ごとに傾斜情報を取得し、鋼材2の挿入完了後、傾斜計11を、この傾斜計11に取り付けた線材13を地上から引いて回収する。
(もっと読む)
移動機構の防塵装置および測定機
【課題】可動部材への影響を極力低減できる防塵装置およびこれを用いた測定機を提供する。
【解決手段】ステージ2を挟む第1蛇腹部材31および第2蛇腹部材32と、蛇腹部材31,32の伸縮方向に対して直交する幅方向両端側にステージ2の移動方向に沿って配置され蛇腹部材31,32のステージ側端部をガイドするガイド機構50と、ステージ2の移動に同期して第1蛇腹部材31および第2蛇腹部材32が伸縮するように、ステージ2と第1蛇腹部材31の連結部材33および第2蛇腹部材32の連結部材34との間に掛け回されたワイヤ60とを備える。ワイヤ60は、ステージ2の略重心を通りかつステージ2の移動方向に沿った軸線上に配置されている。
(もっと読む)
移動機構の防塵装置および測定機
【課題】可動部材への影響を極力低減できる防塵装置およびこれを用いた測定機を提供する。
【解決手段】Y軸移動機構3を覆う帯状の1枚の防塵シート30を備える。防塵シート30は、ステージ2の移動領域のうち、ステージ2を挟んだ一方側の開口23を覆うとともに一端がステージ2に連結された第1表面覆部31と、ステージ2を挟んだ他方側の開口23を覆うとともに他端がステージ2に連結された第2表面覆部32と、第1表面覆部の他端と第2表面覆部の一端とを連結するとともにY軸移動機構3を挟んで第1表面覆部および第2表面覆部とは反対側に配置された裏面覆部33とを有し、これらの覆部が前記可動部材の移動に伴って回行可能に構成されている。
(もっと読む)
101 - 120 / 390
[ Back to top ]