
Fターム[2F069JJ10]の内容
測定手段を特定しない測長装置 (16,435) | 走査 (1,064) | 検出器による走査 (606) | 移動型 (537) | 回転 (84)
Fターム[2F069JJ10]に分類される特許
41 - 60 / 84
検出装置

【課題】検出手段の損傷を確実に防止することができる検出装置を提供する。
【解決手段】搬送手段3により搬送される物体Sに接近又は離間する方向に移動して該物体Sの性状を検出可能であると共に、計測手段6が計測した移動方向に沿った物体Sの長さに応じて物体Sに接近可能な検出手段21と、搬送手段3による物体Sの搬送方向に対して検出手段21より上流側で検出手段21と共に物体Sに接近可能であり、前記移動方向における物体Sの規制位置にてこの物体Sに接触して物体Sを検知可能な検知手段7と、検知手段7が物体Sを検知した際に物体Sと検出手段21との接触を回避する回避手段5とを備えることを特徴とする。
(もっと読む)
形状測定装置及び形状測定方法

【課題】所定の基準面と直角の方向における位置を測定する形状測定において、従来よりも簡易な構成によって、基準面に対して大きな傾斜角をなしかつ任意の方向を向いた測定面における測定を可能とする。
【解決手段】形状測定装置1を、少なくとも2軸方向(X、Y)に試料Wとプローブ20とを相対運動させて試料Wの表面をプローブ20で走査させる多次元移動手段(11、30)と、試料Wを置くための、2軸方向(X、Y)に対して直角な軸Zに対して傾斜した傾斜面を有する試料台12と、傾斜面の垂直軸Aを回転軸として試料台12を回転させる回転手段とを備えて構成する。
(もっと読む)
回転センサ
【課題】ステータとステータに回転自在に支持されるロータとの間の隙間を少なくしてロータのガタ付や傾きを抑えるようにした回転センサを提供する。
【解決手段】貫通孔12aが形成されたステータ12、ステータの貫通孔の一側に配置され回転軸と一体に回転可能に装着されるロータ13、ステータの貫通孔の他側からロータの内側に嵌合されてステータにロータを所定のクリアランスを存して回転自在に保持するスリーブ14、ロータの円筒部13aの内周面に周方向に間隔を存して形成された嵌合用突部16及び係合用突部17、スリーブの円筒部に嵌合用突部及び係合用突部と対応して周方向に沿って形成され、ロータの円筒部にスリーブの円筒部を所定のクリアランスまで挿入して周方向に所定の角度だけ回転させたときに嵌合用突部と嵌合する嵌合部18及び係合用突部が圧入する係合溝19からなる固定手段を備えている。
(もっと読む)
座標測定システム及び座標測定方法
【課題】エラーがなく、正確に測定でき、高速走査に耐えられる座標測定システムを提供する。
【解決手段】 回転軸(65)を中心にロータ(100)が回転することで、接触プローブ(15)の半径アーム(149)先端に針(123)を介して取り付けた接触ボール(120)が移動する座標測定システムについて、回転軸(65)のスライド移動とロータ(100)の回転の組み合わせから生じる経路に沿って、測定対象部品の測定地点の座標を接触ボール(120)の接触で測定するに際し、測定対象地点の接触ボール(120)の位置が、ロータ(100)の回転軸(65)に対して距離(r)だけオフセットしている。
(もっと読む)
シリンダボアの測定方法及び測定装置
【課題】エンジンのシリンダボアの真円度等を測定する際、シリンダヘッドとベアリングキャップ部材とをシリンダブロックに締結し、実際のエンジンの作動状態に近似させた状態で測定を行って、エンジンの作動状態における正確な真円度の測定データを得る。
【解決手段】測定するエンジンのシリンダブロック1に、シリンダヘッド3とベアリングキャップ部材とをボルトにより組み付けてシリンダ組立体9とする。これをベアリングキャップ部材8が上側となるように設置し、ウォータージャケットに高温の流体を送り込む。この状態で測定装置20を組立体9の上方からシリンダボア2に挿入して測定することにより、エンジンの作動時の状態を再現し、内部応力や熱膨張の影響を反映した真円度を測定することができる。測定装置20を設置するため、主軸受部には載置ブロック21が掛け渡され、位置決めのため、シリンダボア2と合致する基準部材22が設けられる。
(もっと読む)
タイヤ試験装置及び方法
【課題】タイヤの試験を素早くかつ完全に実施可能にする、タイヤを試験するための試験配置並びに装置及び方法を提供する。
【解決手段】2つの側壁11、13およびトレッド部分15を有するタイヤ10を特に干渉測定法によって試験するための装置1である。この装置には、タイヤ10がスキャンされて測定結果を生成するための測定ユニット20と、測定ユニット20のための位置決め手段30とが設けられている。測定ユニット20は、少なくとも3つの測定ヘッド21、22、23を有している。第1測定ヘッド21および第2測定ヘッド22は、側壁11、13の外側面12をスキャンするのに用いられ、第3測定ヘッド23は、少なくともトレッド部分15の内側面14をスキャンするのに用いられる。この装置1によって、タイヤ10は迅速にかつ十分に試験され得る。
(もっと読む)
衝突防止装置
【課題】移動する装置が高速で動く場合であっても、移動する装置の筐体に発生する歪みによる影響が移動する装置内の機器に及びにくい衝突防止装置を提供することにある。
【解決手段】移動対象装置(3次元形状測定装置)30を移動手段によってX,Y,Z方向に移動させる装置に用いられる衝突防止装置において、移動対象装置30内のフレーム34を覆う筐体32と、測定対象物との衝突により筐体32に生じた歪みを検出する歪みセンサ36と、歪みセンサ36が検出した歪みが所定以上になった場合に移動手段を停止させる制御手段とを備え、筐体32とフレーム34とが、移動手段の機構部である接続ロッド28で接続されている。
(もっと読む)
角度検出装置及び方法
【課題】測距センサの精度に関係なくスクリーンの傾斜角度を良好な精度で求めることが可能な角度検出装置及び方法を提供する。
【解決手段】画像を投射する投影装置とスクリーン間の距離を測定する1つの測距センサを備え、該測距センサを回転させて測距センサの検出方向を複数の方向へ指向させる。そして、測距センサから検出方向毎に得られる投影装置とスクリーン間の距離データ、及び検出方向間の角度から、投影装置の投射光軸と垂直な方向に対するスクリーンの傾斜角度を算出する。
(もっと読む)
ホース検尺装置
【課題】簡単な構造でホース取り出し長さを誤差なく正確に測定する。
【解決手段】ホース取り出し開始時にセンサー1で最先端のマークMを読み取ってからホースHを取り出す。取り出されたホースHの長さが測長手段2で測定されると共に、予め設定された所望のホース切断長さに対する測長手段2からの測定データが表示部4に表示され、表示を確認しながらホースHの取り出し、所望ホース切断長さに到達した時点で、ホースHの末端側のマークMをセンサー1で読み取る。データ処理部3が、測長手段2からの測定データに基づきホース取り出し終了位置のマークMを検索し、ホース取り出し開始時とホース取り出し終了時に読み込んだ両マークMからの長さデータの差を求め、長さデータの差と、所望のホース切断長さとを比較し、両者が一致した時のみ、測定完了信号を出力して作業者に通知される。
(もっと読む)
2つのハウジング貫通ボアのボア壁の磨耗状態を検知するための測定装置
【課題】2つのハウジング貫通ボアのボア壁の磨耗状態を検知するための測定装置を提供する。
【解決手段】少なくとも2軸のスクリュー押出機の、互いに平行なボア軸線を有する2つのハウジング貫通ボアのボア壁の磨耗状態を検知するための測定装置は、後部駆動輪(8)と、前部案内輪(12)と、各々がボア軸線を中心として旋回式に駆動可能であるとともにそれぞれのボア壁から所定の距離を置いて位置決め可能である非接触式に動作する距離センサ(21、21’)とを備えた架台を有する。
(もっと読む)
バッチリアクター内の基板ホルダのアライメントを決定するためのセンシングシステム及び方法
【課題】均一なガスフローパターンにより均一な堆積フィルムを生じる半導体処理システムを提供する。
【解決手段】 半導体基板を処理するために、リモートコントロールされ、基板ホルダのスロット内に挿入されたセンサシステム100が、リアクター等のバッチリアクター内において、ウェハボート等の基板ホルダのアライメントを測定するために用いられる。センサシステム100は、コントローラと通信するためのトランシーバと、プロセスチャンバ外部のデータ収集ユニットとを備える。さらに、センサシステム100は、センサからプロセスチャンバの壁まで距離を測定するための距離センサ120を備える。センサは、プロセスチャンバの周囲360°に渡る範囲の測定を得るために回転される。プロセスチャンバ内の基板ホルダのアライメントは、回転角と、測定された距離又は距離センサ120によって受信された信号との関係に基づいて決定される。
(もっと読む)
眼鏡枠形状測定装置
【課題】 測定子が軽い力で動くと共に、装置構成を複雑化することなく、高速な測定を可能にする。
【解決手段】 眼鏡枠保持部と、回転支基と、回転支基に配置された測定子とを備え、回転支基を回転させ、測定子の動径方向及び高さ方向の移動を検知して眼鏡枠の三次元形状を測定する。スリット板を測定子と一体的に配置し、光を発する発光部と受光する画素を選択可能な2次元センサとを持つ投光受光ユニットを回転支基に配置する。2次元センサは、受光する画素が選択的に設定された平行でない第1受光ラインと第2受光ラインを持ち、スリット板は第1受光ラインに対して平行でない第1スリットと第2受光ラインに対して平行でない第2スリットとを持ち、第1受光ライン及び第2受光ラインでそれぞれ検出される第1スリット及び第2スリットの投影位置に基づいて測定子の動径方向及び高さ方向の移動位置を検知する。
(もっと読む)
クレーンの積み降ろし位置決定方法およびその装置
【課題】クレーンで吊り上げた被搬送物を地上運搬車の荷台に精度よく積載するための積み降ろし位置決定方法と積み降ろし位置決定装置を提供する。
【解決手段】クレーンで吊り上げた被搬送物を停車した地上運搬車の荷台に積み降ろすに際し、地上運搬車の停車位置の後方に設置した距離センサーで荷台後部の左右両幅端部の位置を測定し、該両幅端部の位置から荷台の幅方向の中心を求め、この中心と吊り上げた被搬送物の幅方向中心とが一致するようクレーンを移動させ、その後、被搬送物を荷台上に積み降ろすことを特徴とするクレーンの積み降ろし位置決定方法。
(もっと読む)
多層フィルムの厚さを測定する方法
本発明は、異なる不導体材料から成る複数層を有する多層フィルムの厚さを検出する方法に関するものである。この方法によれば、多層フィルム13の厚さが、第1センサ17と、第2センサ16と、任意の複数追加センサとによって測定される。第1センサ17は、約1−2分間持続する短い周期で全厚の分布を測定するが、測定誤差の幅が大きい。第2センサ16は、測定誤差の幅は小さいが、全厚分布の測定周期が長く、約10−30分間持続する。これら2つの厚さ分布を比較することで、第1センサ17に対する修正分布が計算できる。この修正分布は、長い周期を通じて一定のままであれば、より正確な新たな厚さ分布が第2センサによって利用可能にされ、新たな修正分布の計算が可能になるまで、センサ17のすべての厚さ分布に適用できる。  (もっと読む)
(もっと読む)
深穴測定装置および深穴測定方法
【課題】 真円度、真直度、直径、円筒度等の深穴精度の測定を行うことのできる深穴測定装置および深穴測定方法を提供する。
【解決手段】 本発明の深穴測定装置は、上記の課題を解決するために、被測定物である深穴の内部に設置された測定装置の回転の中心軸から被加工物の内壁までの半径方向の距離を測定する変位検出手段を回転可能に構成すると共に、この変位検出手段を含めた測定装置本体の回転角度、傾きを検出する。さらに、変位検出手段からの検出信号を用いて被測定物である深穴の真円度、真直度、直径、円筒度等の深穴形状精度を一度に演算して出力する手段を有する。
(もっと読む)
紙葉類の厚さ検知装置および紙葉類の厚さ検知方法
【課題】紙葉類全面の厚さを搬送状態の影響を受けることなく常に安定かつ高精度に検知することができる紙葉類の厚さ検知装置を提供する。
【解決手段】有価証券等の紙葉類を搬送しながら検査したり仕分けしたりする紙葉類処理装置等において、搬送される紙葉類の厚さを検知する紙葉類の厚さ検知装置において、紙葉類の全面にわたって厚さを検知するために、複数の厚さ検知器を紙葉類の搬送路に対し搬送方向と直交方向に並設する場合、紙葉類の搬送状態(スキューやスライド等)に対する不安定さに対して、両外側の厚さ検知器の各出力を相補的に用いることによって高精度な処理を実現する。
(もっと読む)
圧縮機用ハウジングの歪み測定方法及びその装置
【課題】部品単体の状態においてもボルトの締結力が加わった状態と同等の条件でハウジングの歪みを測定することのできる圧縮機用ハウジングの歪み測定方法及びその装置を提供する。
【解決手段】ハウジング1aの各ボルト挿入箇所にそれぞれ軸方向の圧縮荷重を付与するとともに、第1及び第2の測定器13,14をハウジング1aの軸心を中心に回動することにより、荷重を付与した状態でハウジング1aの歪みを周方向に亘って測定するようにしたので、ハウジング1aが部品単体の状態においてもボルト7の締結力が加わった状態と同等の条件でハウジング1aの歪みを測定することができ、組立後のハウジング1aにおける歪みを的確に検査することができる。
(もっと読む)
三次元測定装置
【課題】 測定者の使い勝手を向上させると共に、再現性の高い測定を可能にする。
【解決手段】 被測定物200を測定するための測定プローブ101と、この測定プローブ101を三次元測定空間内で外部からの力に対して移動自在に支持すると共に前記測定プローブの位置を検出するための位置情報S1を出力する測定アーム100と、位置情報S1に基づいて測定プローブ101の三次元測定空間内の位置を検出するとともに、測定プローブ101の三次元測定空間内における移動を任意の線上又は面上に制限するように測定アーム100を制御する制御部300とを備える。
(もっと読む)
工作物の表面を走査する方法
プローブヘッドが公称経路に沿って表面状態に対して移動される関節プローブヘッドに取り付けられる表面検出器を使用して表面状態や、表面状態の法線曲面の少なくとも近似値を測定するための方法であって、その表面状態は、表面検出器、および、実質的に法線曲面の方向への表面状態に対する表面検出器の距離または力で検出される。その法線曲面は、少なくとも一部分を、数学的にパラメータで表現可能とされる曲がった形状に近似させることによって、決定され得る。 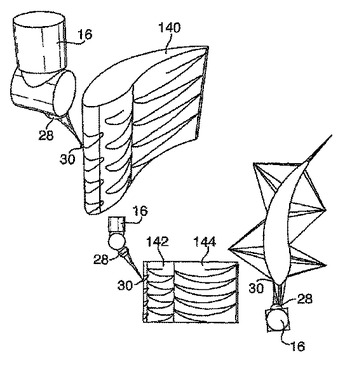 (もっと読む)
(もっと読む)
加工対象物の表面を走査するための方法
測定システムは関節式プローブヘッドに取り付けられた表面検出器を有し、プローブヘッドはさらに座標位置決め装置に取り付けられる。表面検出器は、表面を走査するため、座標位置決め装置およびプローブヘッドの少なくとも一方を少なくとも1つの軸線に関して駆動することにより、表面に対して動かされる。この表面検出器は表面からのその距離を測定し、プローブヘッドは、表面検出器の相対位置を実時間にて表面から予め設定された範囲内まで制御するため、表面検出器が少なくとも1つの軸線を中心として回転するように駆動される。  (もっと読む)
(もっと読む)
41 - 60 / 84
[ Back to top ]