
Fターム[2F069JJ10]の内容
測定手段を特定しない測長装置 (16,435) | 走査 (1,064) | 検出器による走査 (606) | 移動型 (537) | 回転 (84)
Fターム[2F069JJ10]に分類される特許
21 - 40 / 84
走査運動誤差測定方法
【課題】特別な外部基準を必要としないため簡便、低コスト、迅速、低設置面積といった特徴を持つ走査運動誤差測定方法において、従来、取り除くことのできなかったスピンドル回転誤差の影響を低減できる走査運動誤差測定方法を提供する。
【解決手段】旋盤や円筒研削盤上において作製した加工対象である被加工物5をスピンドル3から取り外すことなくそのまま測定の基準として用いて、被加工物5を搭載したスピンドル3の回転中心軸4に対して工具Tと正対する位置に変位検出器Bを配置し、回転中心軸4に沿ってスライドにより走査しながら得られた変位検出器Bの出力から、回転中心軸4を基準としたスライド走査機構の持つ運動誤差を測定する装置において、回転中心軸4の整数回転分の平均を求めることにより、回転中心軸4の運動誤差の影響を低減する。
(もっと読む)
内面検査装置とこれを備える内面加工検査装置

【課題】切削加工後の長尺シャフトなどの管状部材の内面を簡単に検査できる内面検査装置を提供する。
【解決手段】管状部材1の内面2を加工する内面検査装置であって、管状部材1を固定する固定装置10と、固定装置10により固定された管状部材1の内面2を加工する加工機20、30、40と、内面2に区画された管状部材の内部空間に位置した状態で、加工機に加工された内面2を検知する内面検査ヘッド15と、を備える。
(もっと読む)
シリンダボアの熱変形測定装置
【課題】温間での測定においてシリンダボアの壁面の温度分布の変化を低減するとともに、エンジン実働時に近い温度分布を実現させてシリンダボアの正確な熱変形を測定できるシリンダボアの熱変形測定装置を提供する。
【解決手段】シリンダボア2に挿入されるピストン状の本体20と、本体20に設けられ、ボア壁面3のシリンダボア2の径方向の位置を読み取るギャップセンサ30と、本体20をシリンダボア2の高さ方向に所定の範囲で上下動させる駆動機構と、ギャップセンサ30をボア壁面3に沿う円周方向に回転させるとともに円周方向における所定の位置で位置決めするロータ27と、ギャップセンサ30の高さ方向における位置を読み取る回転センサ等と、ギャップセンサ30の円周方向における位置を読み取るロータリエンコーダ等と、を備えた。
(もっと読む)
形状測定装置
【課題】長尺大面積の直線形状や、面形状の測定における逐次3点法の零点調整を、工作機械やそれに類似する測定システム上に簡便に実現することができ、反転法と異なり長尺の被測定物の被測定対象面を置き直すことがなく測定ができる形状測定装置を提供する。
【解決手段】
形状測定装置は、変位センサ41〜43の検出感度軸方向Kが水平面に含まれるとともに互いに反対方向となる第2姿勢位置D2及び第3姿勢位置D3、及び水平面と直交する鉛直方向に向ける第1姿勢位置D1を取り得るようにホルダ38を回転自在に支持する姿勢可変機構を備える。形状測定装置は基準幅直定規を変位センサ41〜43の配列方向を走査方向として、該走査方向に走査測定することで得られる幅真直形状と基準幅直定規の校正値を比較することで変位センサ41〜43の零点調整誤差を算出し、被測定物の断面形状を逐次3点法で測定して、零点調整誤差に基づき校正する。
(もっと読む)
形状測定方法及び測定機能を有する機械
【課題】テーブルに固定されているワークの測定基準面が傾いている場合でもワークの形状を精度良く測定することができ、測定作業を簡単に行うことができる形状測定方法及び測定機能を有する機械を提供する。
【解決手段】測定ヘッド9がワーク7に対してアプローチする複数の測定動作方向を画面に表示するステップと、複数の測定動作方向のうちからワーク7の測定基準面2にアプローチするいずれか一つの測定動作方向を選択するステップと、ワーク7の測定基準面2上の3点の座標値を選択された測定動作方向へアプローチさせて測定するステップと、測定した3点の座標値に基づき測定基準面2を装置1の主軸3の軸線CLに対して垂直に向けるのに必要とされる回転送り軸の割出し角度を演算するステップとを含み、ワーク7の形状を測定する。
(もっと読む)
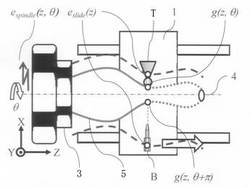
円形孔の内径測定装置と測定方法
【課題】測定対象物に形成された円形孔の内径を測定する技術を提供する。
【解決方法】内径測定装置10は、距離センサ12と、回転機構38と、コンピュータ20を備えている。距離センサ12は、円形孔34の内部に配置され、円形孔34の内壁までの距離を測定する。回転機構38は、円形孔34の軸36に対して角度θを成す基準軸32を中心に距離センサ12と測定対象物16を相対回転させる。コンピュータ20は、距離センサ12によって各方向で測定された距離データから、円形孔34の軸36に垂直な断面形状を特定する断面特定機能と、断面特定機能によって特定された楕円形状となる断面形状から、その短径を算出する短径算出機能を併せ持っている。内径測定装置10は、算出された楕円形状の短径を円形孔34の内径とする。
(もっと読む)
断面形状の測定装置と測定方法
【課題】測定対象物に形成された円形孔の軸に垂直な断面形状を測定する技術を提供する。
【解決方法】断面形状測定装置10は、移動機構26と、回転機構38と、距離センサ12と、コンピュータ20によって測定手段を構成しており、下限位置A2において基準軸32の回りの断面形状(測定形状)を測定する。コンピュータ20は演算手段を構成しており、測定手段によって測定された楕円形状となる測定形状の長径と短径の長さ及び長径方向に基づいて、測定対象物16に形成された円形孔34の軸に垂直な断面形状を測定する。下限位置A2における測定形状のみをもちいて、円形孔34の軸に垂直な断面形状を測定することができる。
(もっと読む)
スパイラル鋼管の製造方法および形状測定装置
【課題】スパイラル鋼管の製造工程において、鋼帯の成形・溶接後の鋼管の形状をオンラインで計測可能であるとともに、現状の設備を活用し極力簡単な設備改造で計測可能なスパイラル鋼管の製造方法および形状測定装置を提供する。
【解決手段】このスパイラル鋼管の形状測定装置は、鋼帯2を内面ローラー4および外面ローラー4を備える成形装置3を用いて管状に成形した後、鋼帯2の幅方向端面突合せ部をサブマージアーク溶接して鋼管7にするスパイラル鋼管の製造方法の溶接工程に用いられるスパイラル鋼管の形状測定装置であって、内面ローラー4を支持するマンドレル1の先端部に設けられて鋼管7の内面までの距離を非接触で測定する距離計17と、距離計17を鋼管7の周方向に回転させるモータ15と、距離計17の回転角を計測する回転角計測手段とを備えている。
(もっと読む)
非真円形穴加工方法および非真円形穴加工装置
【課題】高速かつ高精度でワークを加工できる非真円形穴加工方法を提供すること。
【解決手段】非真円形穴加工方法は、シリンダブロックに既に形成された断面非真円形状のボアと同一形状のボアを、シリンダブロックに形成する。すなわち、既に形成されたボア軸線上に複数の測定点を設定し、これら複数の測定点それぞれでのボアの内径形状を測定して、内径形状データとして取得する内径形状データ取得工程と、内径形状データを周波数解析し、0次からn次(nは自然数)までの周波数成分の振幅値および位相値を分析内径形状パラメータとして算出する分析内径形状パラメータ算出工程と、前記内径形状パラメータを、加工装置の電子記憶媒体に記憶させる分析内径形状パラメータ記憶工程と、を備える。
(もっと読む)
金属帯板の形状測定装置
【課題】金属帯板の形状を板幅端部まで精度良く測定でき、調整も容易で部品の交換だけで長期間使用できる金属帯板の形状測定装置を提供する。
【解決手段】金属帯板1が走行するラインに両端を回転自在に支持され金属帯板1に押し込むように設置されるロール10,100において、ロール10,100は、少なくとも1本以上の円周方向から傾斜した方向の溝21と溝21以外の部分であるランド部22が表面に形成された内側ロール20、又は、少なくとも2本以上の円周方向の溝201と溝201以外の部分であるランド部202が表面に形成された内側ロール200に円筒40を嵌合し、ランド部22,202にはロール10,100の軸方向に穴23を形成し、穴23にランド部22,202に作用する金属帯板1への押し込み荷重を測定するセンサー30を設置した。
(もっと読む)
球面形状測定装置および球面形状測定方法
【課題】 非接触で球面形状を高精度に測定できる球面形状測定装置および球面形状測定方法を提供する。
【解決手段】 軸部1bの一端に球面形状部1aを有する被測定物1を、被測定物支持手段10により軸部1bの中心軸回りに回転させる。球面形状部1aの表面位置を非接触で測定する非接触変位計31を、その中心軸上の所定位置を回動中心として軸部1bの中心軸を含む平面内で、変位計回動手段32により回動させる。被接触変位計31の軸方向位置は軸方向位置調整手段41で調整する。これにより、被測定物1を回転させながら、その軸部1bの中心軸を含む平面内で前記球面形状部1aの中心を回動中心として非接触変位計31を回動させて、球面形状部1aの球面形状測定を行う。
(もっと読む)
電動式座標測定装置
座標測定装置(10)はハウジング(12)を有し、ハウジングは台(11)上に回転可能に支持され、水平方向並進アーム(15)と係合するキャリッジ(14)を乗せる垂直ピラー(13)が取付けられている。アームの各端のタレット(18、19)が、プローブ(22、23)に接続された回転体(20、21)を収容する。台の回転、キャリッジの垂直運動、アームの水平運動、及びプローブの回転が、ハウジング内のモータ(27、28、29、30)によって駆動される。モータの回転は、ケーブル及びプーリ組立体によってアームとキャリッジに伝達される。アームの横方向動作を制御するケーブル(43)は、キャリッジがピラーに沿って上下に移動する際にケーブルの一定長さ及び張力を維持するために、両端がアーム両端に位置する先端(16、17)に取り付けられ、キャリッジ上側及び下側に位置するピラーの部分に沿って上方及び下方に延在する。プローブを測定表面に対し一定角度で維持するようプローブの回転と基部の回転が協調される。 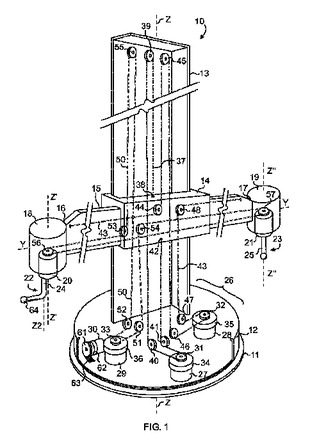 (もっと読む)
(もっと読む)
金属帯板の形状測定装置
【課題】単純な構造で精度が良く、その上安価な金属帯板の形状測定ロール及び金属帯板の形状測定装置を提供する。
【解決手段】金属の帯板が走行する設備に両端が回転自在に支持され前記帯板を巻き付けるように配置されるロールにおいて、該ロールの表面には少なくとも1本以上の周方向から傾斜した溝、又は、少なくとも2本以上の円周方向の溝を設けるとともに、前記ロールの軸方向位置には少なくとも1個以上の前記帯板の変位を測定する変位測定手段を備えた。
(もっと読む)
往復動内燃機関のシリンダ直径計測器
【課題】往復動内燃機関のシリンダ直径を精度良く、かつ、容易に計測できる往復動内燃機関のシリンダ直径計測器。
【解決手段】往復動内燃機関のシリンダ101の軸芯O1 上に設けたガイド2と、該ガイド2を保持する支持体3と、前記ガイド2に摺動自在に挿入した支持棒4と、前記シリンダ101の軸芯O1 と交差するように前記支持棒4に取り付けた測長器5より成り、且つ前記測長器5を、棒状の測長器本体6と、該測長器本体6の先端部に設けた接触又は非接触式でかつ測定距離を電気信号に変換して出力する変位変換器7により形成する。
(もっと読む)
携帯型計測装置
携帯型計測装置のための方法及びシステムが記載される。本発明の1実施形態は、第1のリンクと、第1の自由度で移動するように動作可能な第1の連結器によって第1のリンクと連結される第1のプローブと、第2の自由度で移動するように動作可能な第2の連結器によって第1のリンクと連結される第2のプローブと、第1の連結器の動作と関係付けられる第1のセンサ信号を出力するように動作可能な第1のセンサと、第2の連結器の動作と関係付けられる第2のセンサ信号を出力するように動作可能な第2のセンサとを有する装置である。また、実施形態は、第1及び第2のセンサと連絡するプロセッサであって、第1のセンサ信号及び第2のセンサ信号を受信し、且つ少なくとも部分的に第1のセンサ信号及び第2のセンサ信号に基づいて第1のプローブと第2のプローブとの間の距離を判断するように動作可能なプロセッサを有する。  (もっと読む)
(もっと読む)
ウエハー反り測定の配置構造及び反り測定方法
ウエハーの反りを定量化するための配置構造に関する。プラズマ処理システム内に位置する配置構造が提供される。配置構造はウエハーを保持するための支持機構を含む。配置構造は、ウエハー上の複数のデータポイントの第1測定データセットを収集するように構成された第1センサセットをも含む。第1測定データセットは、第1センサセット及びウエハーの間の最小ギャップを表す。第1センサセットは、プラズマ処理システムの処理モジュールの外部にある第1位置に位置している。 (もっと読む)
非接触センサ用回転ユニット及び非接触センサ用回転装置
【課題】非接触センサの走査範囲の方向を容易に変更することができる非接触センサ用回転ユニット及び非接触センサ用回転装置を提供すること。
【解決手段】一方向に走査可能な非接触センサ2と、非接触センサ2を支持する支持手段3との間に配設され、非接触センサ2の走査方向に対して90度回転可能となっている非接触センサ用回転ユニット1であり、この非接触センサ用回転ユニット1の少なくとも0度と90度の回転状態を維持するための位置決め手段である突起13a、第1列状突起14a、及び、第2列状突起14bが非接触センサ用回転ユニット1に設けられている。
(もっと読む)
三次元画像生成装置及び三次元画像生成方法
【課題】安全で測定精度の良い三次元画像を生成する三次元画像生成装置を提供する。
【解決手段】この三次元画像生成装置110は、被検査対象物6に超音波を送信する送信部と被検査対象物6から反射した超音波を受信する受信部とを備えたプローブ1と、プローブ1の三次元位置情報及び姿勢情報を生成するセンサ2と、所定のエリアに磁界ベクトルを形成するトランスミッタ4と、三次元位置情報及び姿勢情報に基づいてプローブ1から取得された反射画像の三次元形状を演算するPC(演算部)12と、演算結果を三次元画像として表示するモニタ(表示部)14と、センサ2からの座標をリアルタイムに演算する位置検出回路10と、プローブ1から得られた反射画像データを処理するイメージプロセッサ11と、を備えて構成されている。
(もっと読む)
動作コースの判定
アーチファクト(10)と、装置(28)との間の動作コースを判定するためのコンピュータ実施可能な方法。該装置(28)は、少なくとも1つの直線自由度(X、Y、Z)および少なくとも1つの回転の自由度(A1、A2)において、アーチファクトと装置とが互いに関連するように動作可能なアーチファクトと相互作用する。本方法は、アーチファクト(10)を表す幾何データを受け取ることと、装置(28)を表す幾何データを受け取ることと、1つまたは複数の最適化基準に準拠するように、装置およびアーチファクトをどのようにして相互作用経路に沿って互いに対して方向付けすることができるかを、前記幾何データから決定することと、を備える。  (もっと読む)
(もっと読む)
液体膜厚さ測定装置、液体膜厚さ測定方法およびニップ調整方法
【課題】シンプルな構成により、ローラの表面に形成される液体膜の厚さが当該ローラの幅方向において均一であるか否かを簡易にかつ精度良く測定することができる液体膜厚さ測定装置および液体膜厚さ測定方法を提供する。また、前述のような液体膜厚さ測定方法を利用することにより、オフセット印刷機における一対のローラ間のニップ調整を簡易にかつ精度良く行うことができるニップ調整方法を提供する。
【解決手段】渡しローラ11等のローラの表面にブレード24を押し当てた状態でローラを一定時間回転させる。このことによりローラの表面に形成された水膜をブレード24により掻き取る。この掻き取られた水の質量または体積に基づいて、ローラの表面に形成される水膜の厚さが当該ローラの幅方向において均一であるか否かを測定する。
(もっと読む)
21 - 40 / 84
[ Back to top ]