
Fターム[2F069MM32]の内容
測定手段を特定しない測長装置 (16,435) | 特定の構造について言及するもの (1,066) | 駆動装置 (203) | プローブの (96)
Fターム[2F069MM32]に分類される特許
1 - 20 / 96
ワーク保持装置及び、このワーク保持装置を備えた3次元形状測定装置
【課題】精密なワークでも保持可能なワーク保持装置及びこのワーク保持装置を使用した3次元形状測定装置を提供する。
【解決手段】ワーク保持装置3は、ワークWを保持する回転ヤトイ31と、ベース部材32と、回転昇降機構33と、を有する。回転昇降機構33は、支持部34を上昇させ回転ヤトイ31の背面31Rと接触させ、この回転ヤトイ31をベース部材32から浮かせた状態で回転させる。また、支持部34を下降させ、回転ヤトイ31をベース部材32に着座させた状態でワークWの測定を行う。
(もっと読む)
形状測定装置、形状測定方法、及びそのプログラム

【課題】検出部を被検物に対して移動させて測定位置毎に停止させて測定する場合の測定速度を向上させることができる形状測定装置を提供する。
【解決手段】形状測定装置は、被検物に対しての相対位置が変更されて被検物の表面の形状を検出する検出部(20)と、検出部により検出された被検物の表面の形状の変位を示す情報に基づいて、被検物に対して検出部が相対的に静止しているか否かを判定する判定部(静止判定部58)と、判定部により検出部が相対的に静止していると判定された場合の形状に基づいて、被検物の表面の形状データを算出する算出部(座標算出部53)と、を備える。
(もっと読む)
光学走査プローブ
【課題】対象物を光ストライプで照射し、対象物表面から反射した光を検出することで、対象物の表面上の複数の点からデータを捕捉するための走査プローブを提供する。
【解決手段】走査プローブは、(a)光ストライプを生成および発するためのストライプ生成手段14、(b)対象物表面から反射した光ストライプを検出するための画素の配列を有する画像センサを備えるカメラ16、(c)カメラ16によって検出された強度に応じて、フレームの取得中に光ストライプの強度を調節するための手段を備える。ストライプ長を修正する手段、処理手段のための隔離された区分室、およびスキャナのための取り付け可能なダストカバーを有するスキャナにも関する。
(もっと読む)
ガイド機構および3次元測定機
【課題】基準面側の荷重が変化した場合にも、基準面側のエアベアリングとガイドとの間の隙間を適正な所定値に保つことができるガイド機構およびそのガイド機構を有する3次元測定機を提供する。
【解決手段】第1の側に基準面を有するガイドと、前記基準面に沿ってスライド可能に前記ガイドに設けられる被案内部材と、前記ガイドの前記基準面との間に第1の隙間を有するように前記基準面を押圧し、前記被案内部材に設けられる基準側案内部材と、前記基準面と反対側の前記ガイドの第2の側面との間に第2の隙間を有するように前記第2の側面を与圧し、前記被案内部材に設けられる与圧案内部材と、を有し、前記第1の隙間が所定値になるように、前記予圧との位置が前記被案内部材に対して上下動するように設けられる前記押圧との相対関係が調整可能であることを特徴とするガイド機構である。
(もっと読む)
座標測定用ヘッドユニット及び座標測定機
【課題】小型、安価で、高速の高精度測定が可能であり、工作機械における機上測定や搬送ラインでのインサイト測定が容易な、座標測定用ヘッドユニットを提供する。
【解決手段】座標測定用ヘッドユニット10において、コンピュータ数値制御によりプローブ12を互いに直交する複数の駆動軸に沿って移動させ、測定対象に当接させて測定対象の寸法を計測するための駆動手段(X軸駆動部14、Y軸駆動部16、Z軸駆動部18)と、該駆動手段14、16、18を収めるための一体化された筐体13と、該筐体13のいずれかの側面に設けられた、前記駆動手段14、16、18のいずれか一つを支持体(ベース30に固定されたスタンド32上のサポート34)に取付けるための取付手段(取付面20)と、を備える。
(もっと読む)
産業機械
【課題】エアー放出量を低減して省エネルギー化を図れる産業機械を提供する。
【解決手段】三次元測定機1(産業機械)は、エアーを供給するエアー供給部7と、エアー供給部7から供給されるエアーにより駆動される駆動機構25と、エアー供給部7から駆動機構25にエアーを導入するエアーレギュレータセット内に設けられ、エアーレギュレータセット内の空気供給路を開閉する電磁弁と、駆動機構25が駆動停止してからの時間が予め設定された設定時間になると、電磁弁を制御して、空気供給路を閉塞させるモーションコントローラー3と、を具備した。
(もっと読む)
産業機械
【課題】 制御装置の機種の増加を抑えることができてコスト増を防止できる産業機械を提供する。
【解決手段】 三次元測定機1は、複数の軸方向へ制御対象物を移動させる移動機構2と、移動機構2に接続されて移動機構2を各軸方向に制御する各軸の制御信号を送受信する第1ポート321と第2ポート322と第3ポート323とを有し、移動機構2を制御する制御装置3とを備えるものであって、制御装置3は、各軸の制御信号を生成する制御信号生成部324と、各ポート321〜323で送受信する各軸の制御信号をそれぞれ設定させる設定部325とを備える。
(もっと読む)
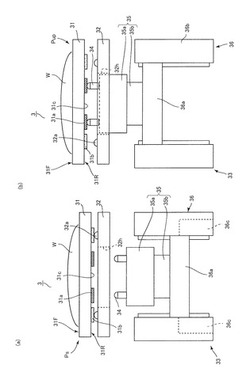
校正用冶具、校正方法、及び該校正用冶具が搭載可能な形状測定装置
【課題】レンズの偏心を測定できる形状測定装置を簡易的に、かつ高精度に校正できる校正用冶具、校正方法、及び該校正用冶具が搭載可能な形状測定装置を提供する。
【解決手段】校正用冶具100は、中心が円周上を3等分し、計測用基準球を接するように設置できる3個の基準球2を備える。形状測定装置は、該校正用冶具を配置可能であり、被測定物の形状に関する情報を取得するための第1プローブと、校正用冶具に対して第1プローブと反対側に設けられ被測定物の形状に関する情報を取得するための第2プローブと、第1プローブ及び第2プローブにより、配置された計測用基準球を測定して第1測定結果及び第2測定結果を求める測定部と、第1測定結果及び第2測定結果を比較してシフトを算出するシフト量算出部と、を備える。校正方法は、上記形状測定装置を用いた測定ステップとシフト量等を算出するシフト量算出ステップとを備える。
(もっと読む)
測定システム
【課題】高速、かつ少ない振動およびエラーで部品表面の多数の座標ポイント取得できるようにする。
【解決手段】基準表面に対して可動サポートを位置決めするための1つ以上のアクチュエータとを含む測定システムであって、前記可動サポートが、サポートコネクタと、前記可動サポートと取り外し可能に接続された、前記基準表面に位置決めされたワークピースの表面の走査経路にある複数のポイントを測定するための走査プローブと、前記サポートコネクタと相互作用するように配置された、モジュラ回転取り付け具を前記可動サポートに接続させるための第1のコネクタ90、およびプローブコネクタと相互作用するように配置された、前記走査プローブを前記モジュラ回転取り付け具に接続させるための第2のコネクタ40を備えるモジュラ回転取り付け具と、前記第2のコネクタを前記第1のコネクタに対して回転させるためのアクチュエータ58とを有す。
(もっと読む)
座標位置測定装置による測定エラーの修正
座標位置測定装置のためのエラー修正方法を開示する。この方法は、(i)各々が第一の物体の表面上のある位置を表す1つまたは複数の第一のデータ値を含む第一のデータセットを取得するステップと、(ii)各々が第一の物体の表面上のある位置を表す1つまたは複数の第二のデータ値を含む第二のデータセットを取得するステップと、(iii)各々が、第一のデータセットにより説明される表面と第二のデータセットにより説明される表面の間の位置差を表す1つまたは複数のエラー値を含むエラーマップを計算するステップと、を含む。第一の物体の面法線が第一のデータ値の各々によって表される各位置において既知であり、ステップ(iii)は、実質的に既知の面法線の方向の位置差を判断することによって各エラー値を計算するステップを含む。加工または測定作業は、第一の物体または第一の物体と名目上同一の物体について実行され、その表面上の位置がステップ(iii)で計算されたエラーマップを使って修正される。 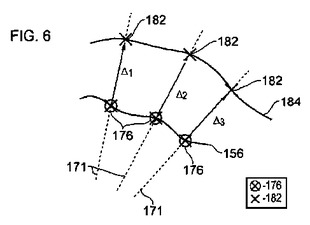 (もっと読む)
(もっと読む)
座標測定機用取付けデバイス
可搬型の関節アーム座標測定機用取付けデバイスが、提供される。取付けデバイスは、開口が中を貫いている本体を含む。へりが、開口の片側に配置され、へりは、座標測定機の基部部分のフランジに係合するように大きさが決められる。開口の一部は、外部の取付け具に結合するように構成されたねじ山を含む。第1のアームが、本体に結合され、第1の位置と第2の位置の間を第1の方向に回転するように構成される。 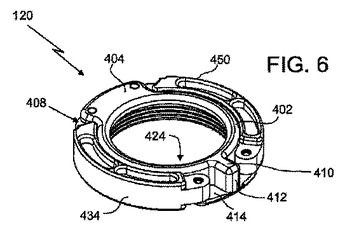 (もっと読む)
(もっと読む)
座標測定デバイス
可搬型の座標測定デバイスが、提供される。座標測定デバイスは、少なくとも1つのアームを含む。一端に磁気部材を含むブラケットが、アームに結合される。プローブが、アームの一端に回転可能なように結合され、プローブは、第1の側面に第1の鉄部材を含み、プローブは、第1の位置と第2の位置の間を動くことができ、鉄部材は、第2の位置にあるときに磁石に近接する。 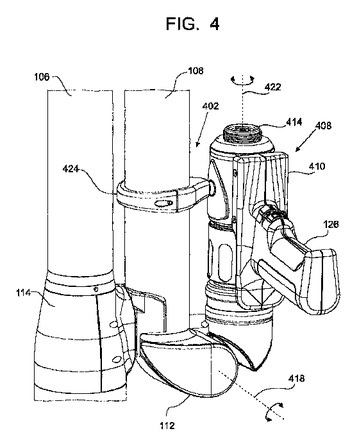 (もっと読む)
(もっと読む)
駆動装置および測定装置
【課題】鉛直方向への駆動精度を向上させる
【解決手段】Z軸スピンドル19は、エアベアリング22−1および22−2により鉛直方向への移動がガイドされる。シャフトモータ23は、鉛直方向に延びるように配置されるシャフト25と、シャフト25に対して非接触で、シャフト25に沿った方向にZ軸スピンドル19を駆動させる駆動力を発生するスライダ26から構成される。また、エアシリンダ29は、シャフトモータ23のシャフト25によりZ軸スピンドル19の重量を支持し、Z軸スピンドル19の重量に見合う押上力を、Z軸スピンドル19の移動に応じて発生する。本発明は、例えば、プローブにより形状を測定する三次元測定装置に適用できる。
(もっと読む)
スタイラス及び接触式変位センサ
【課題】被検物の表面付近まで安全に接近させることができるスタイラスを提供する。
【解決手段】先端部12を被検物Sに接触させて被検物Sの表面を追従させることにより、被検物Sの表面形状を測定するためのスタイラス10は、先端部12の先端12Aよりも前方の所定位置Pを通るように光Lを照射する発光部13と、発光部13から照射された光Lが反射された反射光L1を検知する受光部14とを備えることを特徴とする。
(もっと読む)
フレキシブルセンサチューブ
【課題】瓦礫内探索ロボットが瓦礫に埋もれた人を発見した場合に、その位置を正確に把握することを目的とする。
【解決手段】瓦礫内探索ロボットが外部の空気コンプレッサーから空気圧チューブやCCDカメラ等の信号情報ケーブルで結ばれる必要性があることに鑑み、瓦礫内探索ロボットと外部の空気コンプレッサーとを結ぶ空気圧チューブやロボットに取り付けられたCCDカメラ等の信号情報ケーブルを多関節構造のチューブで覆い、各関節角をポテンショメータ等のセンサにより検出し、そのセンサの出力信号から多関節構造のチューブの全体形状を算出することにより、多関節構造のチューブの先端部に位置する瓦礫内探索ロボットの位置を同定する。
(もっと読む)
関節プローブヘッド
【課題】関節プローブヘッドの回転軸をロックするためのブレーキを提供する。
【解決手段】支持体に取り付くための第1のマウントと、表面検出装置が取り付け可能な第2のマウントとを備え、第2のマウントが第1のマウントに対し一以上の軸回りに回転可能である関節プローブヘッドにおいて、第1のマウントに対する第2のマウントの一以上の軸回りの位置をロックするための少なくとも一以上の機械式ブレーキが設けられ、これにより、少なくとも一つの位置測定装置が、ロック位置において、第1のマウントに対する第2のマウントの一以上の軸回りの位置を決定すべく設けられる。
(もっと読む)
シリンダボアの熱変形測定装置
【課題】温間での測定においてシリンダボアの壁面の温度分布の変化を低減するとともに、エンジン実働時に近い温度分布を実現させてシリンダボアの正確な熱変形を測定できるシリンダボアの熱変形測定装置を提供する。
【解決手段】シリンダボア2に挿入されるピストン状の本体20と、本体20に設けられ、ボア壁面3のシリンダボア2の径方向の位置を読み取るギャップセンサ30と、本体20をシリンダボア2の高さ方向に所定の範囲で上下動させる駆動機構と、ギャップセンサ30をボア壁面3に沿う円周方向に回転させるとともに円周方向における所定の位置で位置決めするロータ27と、ギャップセンサ30の高さ方向における位置を読み取る回転センサ等と、ギャップセンサ30の円周方向における位置を読み取るロータリエンコーダ等と、を備えた。
(もっと読む)
形状測定装置
【課題】高い操作性を有する新たな形状測定装置を提供する。
【解決手段】形状測定装置は、被測定物60を挟んで対向配置される少なくとも2台の駆動機構付き測定機CMM1,CMM2と、これらの測定機ごとにそれぞれ対応して接続される少なくとも2台の操作コントローラ51,52と、を備えるものである。そして、操作コントローラ51,52のそれぞれは、非接続の測定機CMM2,CMM1を含むすべての測定機を操作可能に構成されている。また、操作コントローラ51,52は、切替ボタン53,54を有しており、この切替ボタンを切り替えることによって操作対象となる測定機を選択可能となっている。
(もっと読む)
電動式座標測定装置
座標測定装置(10)はハウジング(12)を有し、ハウジングは台(11)上に回転可能に支持され、水平方向並進アーム(15)と係合するキャリッジ(14)を乗せる垂直ピラー(13)が取付けられている。アームの各端のタレット(18、19)が、プローブ(22、23)に接続された回転体(20、21)を収容する。台の回転、キャリッジの垂直運動、アームの水平運動、及びプローブの回転が、ハウジング内のモータ(27、28、29、30)によって駆動される。モータの回転は、ケーブル及びプーリ組立体によってアームとキャリッジに伝達される。アームの横方向動作を制御するケーブル(43)は、キャリッジがピラーに沿って上下に移動する際にケーブルの一定長さ及び張力を維持するために、両端がアーム両端に位置する先端(16、17)に取り付けられ、キャリッジ上側及び下側に位置するピラーの部分に沿って上方及び下方に延在する。プローブを測定表面に対し一定角度で維持するようプローブの回転と基部の回転が協調される。 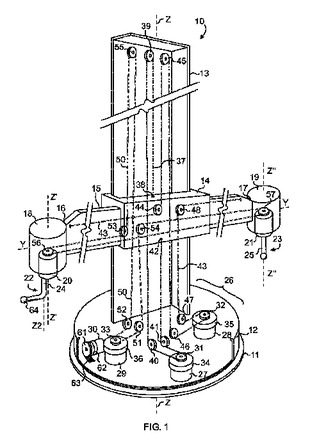 (もっと読む)
(もっと読む)
三次元形状測定方法
【課題】被測定物が非球面形状であっても、極めて高精度に測定データを取得することができる三次元形状測定方法を提供する。
【解決手段】互いに直交するX軸およびY軸方向に駆動される移動体においてZ軸方向に移動自在に支持されたプローブを、被測定物の測定面に、所定の経路に沿って走査させて前記被測定物の形状を測定する三次元形状測定方法であって、測定時にX−Y方向に移動する移動体の移動量を基準として測定データを取得するサンプリングピッチを、被測定物の既得形状情報から得られる走査上の各位置における被測定物の測定面の法線方向に引いた直線と、被測定物の中心線と、が交わる点を中心として、前記表面上の位置で被測定物の表面形状と接する円を近似円とし、その近似円の半径から算出する。これにより、被測定物の表面形状に沿う方向に対して一定のピッチで測定データを取り込むことができる。
(もっと読む)
1 - 20 / 96
[ Back to top ]