
Fターム[2F069QQ11]の内容
測定手段を特定しない測長装置 (16,435) | 表示 (337) | 表示手法 (55)
Fターム[2F069QQ11]の下位に属するFターム
アナログ式+デジタル式 (19)
印示式 (15)
Fターム[2F069QQ11]に分類される特許
1 - 20 / 21
入力判別装置
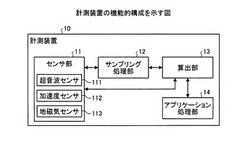
計測装置、及び計測方法
【課題】物体のサイズを簡易かつ迅速に計測することである。
【解決手段】計測装置10は、超音波センサ111と、加速度センサ112と、地磁気センサ113と、算出部13とを有する。超音波センサ111は、所定の測定点と、当該測定点を通過する直線と面との交点との距離を測定する。加速度センサ112と、地磁気センサ113とは、上記測定点と上記交点とにより形成される角度を算出する。算出部13は、測定された上記距離、または、算出された上記角度を用いて、物体を計測する。
(もっと読む)
変位センサシステムに適用する拡張ユニット

【課題】センサシステムを構成するアンプユニットから時系列的に得られる計測データに対して所望の解析処理を適用し、その解析結果に対応する出力を生成することが可能なセンサシステムに適用される拡張ユニットを提供すること。
【解決手段】アンプユニットに連装される拡張ユニットには、計測データ蓄積メモリと、伝送ラインを介して到来する計測データを取得して前記メモリに蓄積する計測データ取得手段と、蓄積された一連の計測データを所定のアルゴリズムに従って解析するデータ解析手段と、データ解析結果を判定する判定手段と、判定結果に対応する制御信号を外部へと出力する出力手段とを具備する。計測アルゴリズムが部品化された複数の処理プログラムが拡張ユニットに組み込まれており、パソコンからの指示に従って、処理プログラムが選択され、選択された処理プログラムが所定の順序で実行される。
(もっと読む)
測定装置
【課題】ゴム層内に埋設されたスチールコードの位置を非破壊方式で簡便に測定でき、かつ取り扱いも容易で低コスト化が可能な測定装置を提供する。
【解決手段】基板12の載置面1204をゴム層2の上面に載せ、測定位置基準部1206をゴム層2の端面2aに押し当てた状態で、球体14を案内部1202に沿って測定位置基準部1206から離間する方向に転動させ、球体14が、ゴム層2の端面に最も近接するスチールコードの真上に転動され、スチールコードとの磁気結合によりスチールコードに吸着されて静止した時の位置と測定位置基準部1206との間の距離をスケール18の目盛から読み取る構成にした。
(もっと読む)
外付け式デジタル角度測定装置
【課題】外付け式デジタル角度測定装置の提供。
【解決手段】この外付け式デジタル角度測定装置は、手動工具に結合され、該手動工具は駆動ロッドと、該駆動ロッドの一端に設けられた駆動ヘッドと、該駆動ヘッドの一側に設けられてネジ締めを行うスリーブコネクタを有する。該外付け式デジタル角度測定装置はケース、表示装置、角度検出システムと結合部を包含する。該ケースは該結合部により着脱自在に該駆動ヘッド或いは該駆動ロッド或いは該スリーブコネクタ、或いは手動工具の、該外付け式デジタル角度測定装置を固定できる任意の位置に取付けられ、並びに該表示装置と該角度検出システムが該ケースに設置される。該結合部により本発明が異なる手動工具に取付け可能とされ、これにより該角度検出システムがさらに正確に誤差なく該手動工具が駆動するネジの回転角度を検出計算し、並びに該表示装置に表示させることができる。
(もっと読む)
座標測定システムに実行可能プログラムを提供する方法、システム、および記憶媒体
【課題】3次元座標測定システムのコントローラで使用するプログラムを顧客にネットワークを介して配信する方法を提供する。
【解決手段】顧客から実行可能プログラムの作成要求を受信するステップ100と、顧客のプログラム実行に係わる経験レベル等の情報を入力するステップとを具備する。作成される実行可能プログラムは3次元座標測定システムで実行される多数の測定ステップをオペレータに示すものである。実行可能プログラムはネットワークを介して顧客に配達される。
(もっと読む)
座標測定システムに実行可能プログラムを提供する方法、システム、および記憶媒体
【課題】3次元座標測定システムのコントローラで使用するプログラムを顧客にネットワークを介して配信する方法を提供する。
【解決手段】顧客から実行可能プログラムの作成要求を受信するステップと、顧客のプログラム実行に係わる経験レベル等の情報を入力するステップとを具備する。作成される実行可能プログラムは3次元座標測定システムで実行される多数の測定ステップをオペレータに示すものである。実行可能プログラムはネットワークを介して顧客に配達される。
(もっと読む)
標識検定装置
【課題】標識検出器と組み合わせて用いられる標識の、検出原理上の回転対称性の程度を評価するための標識検定装置を、提供する。
【解決手段】標識検定装置は、装着部により検定対象の標識を回転軸部材に装着して、駆動部によって回転軸部材に所定の周期運動を与えた場合に、標識検出器から得られた標識の検出データを、処理部に入力し、処理部のデータ処理によって標識の検出原理上の軸対称性の指標データを検定データとして得る。
(もっと読む)
測定支援システム及びこれを利用した測定システム
【課題】測定値の正確性や信頼性を担保しつつ、コンピュータに入力されて処理の対象となる測定値の確定に必要な作業時間や労力を削減する。
【解決手段】 測定対象物の特性を測定する測定装置10と、測定装置10の表示部12から測定者が目視で読み取った測定値を入力するマイクロホンセット30と、測定装置10によって測定された測定値を測定者の指示したタイミングで読み取る計測部13、計測部13で読み取られた測定値を一時的に記憶する記憶部21、マイクロホンセット30から入力された測定値と記憶部21に記憶された測定値を照合する照合部23、照合の結果、マイクロホンセット30から入力された測定値と記憶部21に記憶された測定値が一致した測定値を記録する記録部24、記録部24に記録されたデーから測定結果を求めるデータ処理部40とを備えた携帯情報装置20とから測定システムを構成する。
(もっと読む)
リソグラフィ装置及び測定方法
【課題】レベルセンサのプロセス依存型オフセット誤差を正確に修正する費用有効性の高い方法を提供する。
【解決手段】基板W(たとえば基板を支持するための基板テーブルを備えたリソグラフィ装置内の基板)を露光する方法には、第1及び第2のセンサ10,11を使用して少なくとも1つの基板Wの一部の第1及び第2の高さ測定を実行するステップと、測値の差に基づいてオフセット誤差マップを作成し、且つ、記憶するステップと、第1のセンサ10を使用して高さ測定を実行することによって、前記基板W(又は前記部分と類似した処理が施された他の基板)の複数の部分のハイト・マップを作成して記憶し、且つ、オフセット誤差マップによってこのハイト・マップを修正するステップと、前記基板W(又は他の基板)を露光するステップが含まれている。
(もっと読む)
リソグラフィ装置及び測定方法
【課題】レベルセンサのプロセス依存型オフセット誤差を正確に修正する費用有効性の高い方法を提供する。
【解決手段】基板W(たとえば基板を支持するための基板テーブルを備えたリソグラフィ装置内の基板)を露光する方法には、第1及び第2のセンサ10,11を使用して少なくとも1つの基板Wの一部の第1及び第2の高さ測定を実行するステップと、測値の差に基づいてオフセット誤差マップを作成し、且つ、記憶するステップと、第1のセンサ10を使用して高さ測定を実行することによって、前記基板W(又は前記部分と類似した処理が施された他の基板)の複数の部分のハイト・マップを作成して記憶し、且つ、オフセット誤差マップによってこのハイト・マップを修正するステップと、前記基板W(又は他の基板)を露光するステップが含まれている。
(もっと読む)
担持体にスケールを保持するための方法ならびに担持体とスケールを備えた組立体
本発明によれば、測定目盛(15)を備えているスケール(1)は、静電クランプにより担持体(2)に確実かつ取外し可能に保持される。  (もっと読む)
(もっと読む)
センサー装置
【課題】 一連の入力ステップを順に切り替えながら制御パラメータの入力が行われるセンサー装置について、入力ステップ数及び選択中の入力ステップの位置を判り易く表示させる。
【解決手段】 一連の入力ステップが規定された動作設定メニュー4aに基づいて、入力ステップを順に切り替えながら制御パラメータの入力が行われるセンサー装置であって、ユーザ操作に基づいて入力ステップを切り替える入力ステップ切り替え部2と、直線上に配置された3以上のLEDからなる線状表示部40と、線状表示部40を制御し、動作設定メニュー4aにおける入力ステップ数を表示させるとともに、選択中の入力ステップについて動作設定メニュー4aの一連の入力ステップにおける位置を相対的に表示させる表示制御部3により構成される。
(もっと読む)
プローブ観察装置、表面性状測定装置
【課題】簡便な操作でプローブを高精度に観察できるプローブ観察装置を提供する。
【解決手段】プローブ210を撮像するカメラ230と、カメラ230にて取得した画像データを画像処理する画像処理部と、画像処理部にて画像処理された画像データを表示するモニタ400と、手動操作にて画像処理内容を入力指令するマウス500とを備える。画像処理部は、マウスにて入力される指令に応じて画像データを加工処理する画像データ加工処理部を備える。カメラ230は、低倍率のレンズ系を有し、プローブ210を視野内に入れた状態でプローブ210に対する相対位置が固定された状態で設けられている。
(もっと読む)
3次元計測方法および3次元計測システム
【課題】非接触の計測に際して対象物の配置にずれがあっても、ティーチングで想定された最適の計測を実現する。
【解決手段】3次元計測方法は、非接触センサと、センサの位置および姿勢を変更する数値制御の可能なセンサ移動機構とを用い、あらかじめティーチングによって設定された複数の位置および各位置でのセンサ姿勢を指し示す計測経路情報に則って非接触センサを移動させ、それによって物体の形状を非接触で計測するものであり、予備計測経路情報に従って対象物に対する予備3次元計測を行い、予備3次元計測で得られた形状データとティーチングにおける計測対象である想定対象物の形状データとによって、対象物と想定対象物との位置ずれを検知し、検知した位置ずれに応じて計測経路情報を修正し、修正された計測経路情報に従って対象物の3次元計測を行う。
(もっと読む)
画像処理方法および画像処理装置
【課題】 複数のMR体験者が、同一の複合現実感を体験する場合、体験者同士が接触する可能性があり、本願発明は、MR体験者に接触する可能性のあることを報知することができる画像処理装置を提供することを目的とする。
【解決手段】 ユーザの視点位置および方向から撮像された現実世界画像を描画し(S401)、このときのユーザの視点位置および視線方向がセンサ部により検出され、その視点位置が、接触の可能性のある注意距離内であるか否かが判定し(S403〜S404)、注意距離内であれば、その旨の注意表示がなされる(S405〜S406)。
(もっと読む)
計測装置
【課題】作業性が良好でかつ省スペース化を図るために、手動でバンドブレーキなどの被押圧部品の移動量を計測することができる計測装置を提供する。
【解決手段】計測装置は、ケース1aに固定的に配置される本体部30と、本体部30に所定方向に移動可能に支持され、バンドブレーキの係合部などの被押圧部品を押圧する押圧部40と、本体部30および押圧部40に連結され、本体部30に対して押圧部40を所定方向に移動させる操作部50と、本体部30に対する押圧部40の所定方向の移動量を計測する計測部60とを備える。
(もっと読む)
スピンドルの制動装置および測定器
【課題】スピンドルの操作性および耐久性を向上させることのできるスピンドルの制動装置および測定器を提供すること。
【解決手段】制動装置600は、スピンドル300が移動するシリンダ610と、このシリンダ610内を2つに区画するピストン620と、スピンドル300とピストン620とを、軸方向および軸直交方向に対し一定のクリアランス633を介して連結する連動手段660と備え、連動手段660は、ピストン620に形成された中空室623と、スピンドル300の他端に設けられ、他端側が中空室623内に係合収納される係合部630とを含み構成され、スピンドル300が一端側へ移動する際には、係合部630が中空室623の一端側内壁に当接し、かつ、他端側へ移動する際には、係合部630が中空室623の他端側内壁に当接するように形成されている。
(もっと読む)
複合顕微鏡
【課題】試料に対するより幅広い解析を行うことを可能とすること。
【解決手段】試料5上のXY座標に対応させてLSM像とSPM像とをCPU18により画像情報メモリ22aに記憶し、SPM像のZ座標位置情報DzをCPU18により高さ情報メモリ22bに記憶し、CPU18によって高さ情報メモリ22bからSPM像のZ座標位置情報Dzを読み出すと共に、画像情報メモリ22aに記憶されたLSM像に含まれる輝度情報Dpを抽出し、これらZ座標位置情報Dzと輝度情報Dpとを合わせて試料5の三次元画像情報を作成して表示部23に表示する。
(もっと読む)
高さデータ推定方法、高さデータ推定用プログラム及び3次元形状測定装置
【課題】 被測定物の測定面の任意の位置における高さデータを高精度にて推定する高さデータ推定方法、高さデータ推定用プログラム、及び3次元形状測定装置を提供する。
【解決手段】 複数のサンプリング位置における高さデータに関して、設計データと測定データとの誤差値を求め(S6)、求まった誤差値にて形成される形状の関数を求める(S6)。そして、該関数に基づいて、被測定物の測定面の任意点における推定誤差値を求めるようにしている(S7)。したがって、上記推定誤差値の精度は、測定データの高さデータに基づき作成される面の曲率半径及び傾斜面角度とは無関係となり、一定となる。よって、従来に比べて、高い精度にてなる推定誤差値を得ることが可能となる。
(もっと読む)
1 - 20 / 21
[ Back to top ]