
Fターム[2F077AA11]の内容
感知要素の出力の伝達及び変換 (32,270) | 目的、特徴、課題 (5,635) | 特性の補償、調整又は切り換え (721)
Fターム[2F077AA11]の下位に属するFターム
非直線性補償、直線化 (154)
温度補償 (153)
浮遊容量の補償 (5)
ドリフト、経年変化 (40)
スパン、感度 (48)
Fターム[2F077AA11]に分類される特許
1 - 20 / 321
回転角度検出装置
レゾルバ及びレゾルバの製造方法
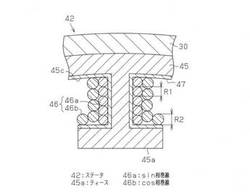
【課題】高い検出精度を確保しつつも、小型化を図ることのできるレゾルバを提供する。
【解決手段】このレゾルバは、sin相巻線46a及びcos相巻線46bが巻回された複数のティース45aがロータを囲繞するようにして設けられたステータ42と、ロータに設けられて各相の巻線46a,46bに付与する磁界を形成する励磁巻線とを備える。そして、このレゾルバでは、ロータが回転するとき、励磁巻線により形成される磁界の変化に基づき各相の巻線46a,46bに誘起される電圧が変化することにより、各相の巻線46a,46bからロータの回転角に応じた電圧信号が出力される。ここでは、ティース45aに、sin相巻線46aが巻回されるとともに、その外側にsin相巻線46aよりも大きい線径を有するcos相巻線46bが巻回される。
(もっと読む)
磁界角計測装置およびそれを用いた回転機

【課題】磁束発生体が高速に回転する場合であっても、磁束発生体または磁気センサの近傍に非磁性の導体(導電体)を配置した構成を用いて精度良く磁界角または回転角を計測すること。
【解決手段】磁界方向に感応する磁気センサ70と、非磁性の第1の導体240と、非磁性の第2の導体242とを備えた磁界角計測装置であって、前記磁気センサは、前記第1の導体と前記第2の導体との間に配置され、前記第1の導体中の渦電流が前記磁気センサに及ぼす磁界と、前記第2の導体中の渦電流が前記磁気センサに及ぼす磁界とが、互いに打ち消しあう構成とする。
(もっと読む)
位置検出装置、及び駆動装置
【課題】高精度に位置情報を検出する。
【解決手段】位置検出装置は、被駆動体の位置に応じて互いに異なる位相差を有する出力信号を出力するn個の検出素子と、n個の検出素子に対して出力信号を逐次出力させて、n個の出力信号によって信号の1周期を構成された第1の検出信号を出力する出力部と、出力部から出力された第1の検出信号の1周期の周波数である基本周波数を含む所定の通過周波数帯域を有し、第1の検出信号のうちの所定の通過周波数帯域を通過させて位相変調された第2の検出信号を出力するフィルタ部と、フィルタ部から出力された第2の検出信号に基づいて、被駆動体の位置情報を検出する位置検出部と、を備える。検出素子の個数を示すnの値は、出力部から出力された第1の検出信号に含まれる検出素子の出力信号の誤差成分のうちの少なくとも所定次数の誤差成分を低減するように定められている。
(もっと読む)
角度測定方法及び角度測定システム
【課題】回転角度を高精度且つ短時間で測定すること。
【解決手段】エンコーダ本体2aに対する回転軸3の相対的な回転角を検出するロータリエンコーダ2と、エンコーダ本体2a及び回転軸3から切り離され、エンコーダ本体2aの回転角を検出する非接触角度検出手段20(レーザ干渉式検出手段)とを備える。これにより、ロータリエンコーダ2が検出した回転角を、非接触角度検出手段20で検出した回転角に基づいて補正することができ、回転角を高精度且つ短時間で測定することが可能となる。
(もっと読む)
位置検出装置
【課題】磁石とホールICとの位置ずれに対するロバスト性に優れた位置検出装置を提供する。
【解決手段】第1磁石11と第2磁石12は仮想平面αを挟んで可動部2に設けられ、互いに向き合う磁極が同磁極となるようにZ軸方向に着磁される。その第1磁石11および第2磁石12よりも可動部2から離れた位置で可動部2に対し相対移動可能に設けられたホールIC5は、ストローク方向に直交する感磁面511を通過する磁束密度に応じた信号を出力する。これにより、第1磁石11の磁界と第2磁石12の磁界とが反発しあい、磁界の向きがストローク方向に平行となる領域が形成されるため、磁石とホールICとの位置ずれに対するロバスト性を高めることができる。また、第1磁石11と第2磁石12の磁界が可動部2に吸引されることが抑制され、ホールIC5の周囲の磁界強度が大きくなる。
(もっと読む)
レゾルバの取付構造
【課題】レゾルバステータを容易にゼロ点調整可能としつつ、より簡易な構成でレゾルバおよび電動機の防水性を確保する。
【解決手段】レゾルバステータ22が周方向に延びる複数の長穴220bを有すると共に、当該長穴220bに挿通される締結部材としてのボルト40を介してモータ11を収容するケース12に取付られる。また、ケース12には、レゾルバステータ22を収容すると共に、開口に蓋体30が螺合される筒状部121が形成されており、当該筒状部121の開口のねじ部121aと蓋体30のねじ部30aとは、テーパ状に形成されている。
(もっと読む)
エンコーダおよびこれを備えた装置
【課題】複数の周期パターンに対する検出部による検出周期を切り替えるエンコーダにおいて、位置検出の遅れを回避する。
【解決手段】エンコーダは、第1の周期パターン11および第2の周期パターン12が設けられたスケール10と、該スケールとの相対移動が可能な検出部22とを有する。検出部22は、第1の検出状態と第2の検出状態との切り替えが可能であり、第1の検出状態にて第1の周期パターンに応じた第1の信号を出力し、第2の検出状態にて第2の周期パターンに応じた第2の信号を出力する。処理部30,40は、検出部から取り込んだ第1および第2の信号の双方を用いて第1の絶対位置を算出する第1の処理を行った後、該検出部から取り込んだ一方の信号を用いて相対移動量を算出する。処理部は、第1の処理において最後に設定した検出状態と同じ検出状態の検出部から一方の信号を取り込む。
(もっと読む)
エンコーダの着磁装置
【課題】円輪状の被検出面にN極とS極とを円周方向に交互に配置した永久磁石を有するエンコーダを造る際に、この永久磁石となるべき永久磁石素材14の着磁のピッチ精度を良好にできる構造を実現する。
【解決手段】円周方向に並べて配置した着磁端子9a、9aの先端面の径方向外端縁11a、11a及び径方向内端縁12a、12aの形状を、円周方向片側で円周方向他側よりも外径側に位置する形状とする。これにより、円周方向に隣り合う1対の着磁端子9a、9aの先端面のうち、円周方向他側に存在する先端面の円周方向片側の端縁を、円周方向片側に存在する先端面の円周方向他側の端縁よりも、外径側に寄った位置に配置する。又、図示しない着磁コイルを、前記各着磁端子9a、9aの外周面を、それぞれ全周に亙り囲む状態で配置する。
(もっと読む)
角度センサ
【課題】一対のロータリートランス用コイルの構成に関連して信頼性を確保し、生産性を向上させること。
【解決手段】角度センサ1は、平面コイルが形成されるロータ基板21を含み、ロータ基板21の内周側に設けられるロータ側環状金属部材23を介して回転軸14に取り付けられるセンサロータ7と、センサロータ7の表面に対向して配置され、表面に平面コイルが形成されるステータ基板31を含み、ステータ基板31の内周側にステータ側環状金属部材35が設けられたセンサステータ6とを備える。ロータ側環状金属部材23とステータ側環状金属部材35はそれぞれ磁性材料により形成され、両環状金属部材23,35のそれぞれに互いに対向する環状対向部23c,35aが形成される。両環状対向部23c,35aのそれぞれに形成された溝23d,35bの中に、信号伝達用のロータリートランス用コイル41,42がそれぞれ配置される。
(もっと読む)
角度センサ
【課題】センサステータを構成する接続線につき電磁ノイズの影響を受け難い角度センサを提供する。
【解決手段】角度センサは平面コイルが形成されたセンサロータと、その表面に対向配置され、多X型の平面コイル(10A〜10D)を含むセンサステータとを備える。センサステータのステータ基板上に設けられた順方向平面コイル10B,10Dと逆方向平面コイル10A,10Cとが接続線15a〜15eを介して直列に接続され、一連の平面コイル10A〜10Dの両端のうち一端が接続線15dを介して正極端子16に接続され、他端が接続線15aを介して負極端子17に接続される。接続線15a〜15eは、一連の平面コイル10A〜10Dの配列に沿って1周に満たない範囲で配置され、一連の平面コイルの一端10aを折り返し点として折り返し接続線15eがその他の接続線15a〜15dに沿って配置され負極端子17に接続される。
(もっと読む)
角度センサ
【課題】センサステータを構成する順方向の平面コイルと逆方向の平面コイルの磁束密度を均等化させ、検出精度を向上させること。
【解決手段】角度センサは平面コイルが形成されたセンサロータと、その表面に対向して配置され、平面コイル10(10A〜10D)を含むセンサステータとを備える。センサステータのステータ基板上には、順方向平面コイル10B,10D及び逆方向平面コイル10A,10Cが形成される。順方向平面コイル10B,10C及び逆方向平面コイル10A,10Cは、その周方向の中央の位置にて半径方向へ伸びる対称軸L1を中心に対称形状をなし、一端10b及び他端10cを含む。各平面コイル10A〜10Dが接続線15a〜15eを介して直列に接続され、直列に接続された各平面コイル10A〜10Dの一端10b及び他端10cが、対称軸L1上に配置される。
(もっと読む)
位置センサ及び角度センサ
【課題】互いに位置をずらして配置された第1の検出コイルと第2の検出コイルとの間の静電結合による出力誤差を低減すること。
【解決手段】角度センサ9は、回転軸に取り付けられ、表面に平面コイルである励磁コイル40が形成されたセンサロータと、センサロータの表面に対し表面が対向して配置され、表面に多X型の平面コイルであるSIN信号検出コイル10及びCOS信号検出コイル20が形成されたセンサステータとを備える。COS信号検出コイル20は、SIN信号検出コイル10に対し位相をずらして配置され、両信号検出コイル10,20の出力に基づき、モータシャフトの回転角度を検出するように構成される。角度センサ9としての出力誤差を低減すべく、SIN信号検出コイル10とCOS信号検出コイル20との位相差を電気角度で90度に微小角度を加算した角度としている。
(もっと読む)
エンコーダ装置及びエンコーダ装置のための補正方法
【課題】 内挿精度の低下を極力抑えて、検出対象物の回転角度又は移動位置を高精度で検出する。
【解決手段】 磁気センサ10は、検出対象物の回転又は移動に応じて互いに90度だけ位相の異なる正弦波状のA相出力信号及びB相出力信号を出力する。A相出力信号及びB相出力信号のそれぞれにおいて、サンプリング値とそれを180度シフトしたサンプリング値の差が最小となる同一位相のサンプリング値を抽出し、前記抽出したサンプリング値の平均値をオフセット補正値として計算する。これらのオフセット値を用いて、A相出力信号及びB相出力信号のサンプリング値をオフセット補正して検出対象物の回転角度又は移動距離を計算する。
(もっと読む)
デジタル角度出力信号の出力方法及び装置
【課題】本発明は、閉ループの負帰還制御型の回転信号処理器の閉ループ内で制御偏差演算による補正及び補正値テーブルを用いた補正を行って制御偏差を0とすることを目的とする。
【解決手段】本発明によるデジタル角度出力信号の出力方法及び装置は、回転角検出器(12)の角度誤差、回転信号処理器(14)における演算過程で生じる誤差信号に起因する角度誤差を閉ループ(200)内の制御偏差演算〔ε=K・sin(θ-φ)〕の段階でデジタル補正し、さらに、デジタル角度出力信号(φ)に角度依存の誤差〔△θ(θ)〕が存在した場合、誤差〔△θ(θ)〕を予め閉ループ(200)内の補正値テーブル(52a)に格納して用いる方法と構成である。
(もっと読む)
エンコーダ及びエンコーダのパターン検出方法
【課題】検出精度を向上させ、高精度を有するエンコーダを提供すること。
【解決手段】パターンを有し、回転軸を中心として回転する回転部と、パターンを検出する第一パターン検出部と、当該第一パターン検出部とは別にパターンを検出する第二パターン検出部と、第一パターン検出部又は第二パターン検出部における検出異常の有無を検出する制御部とを備える。
(もっと読む)
操舵角センサ
【課題】環状駆動ギヤの真円度によって、第1の従動ギヤ及び第2の従動ギヤに生じる回転角度の誤差の影響が小さくされて、ステアリングホイールの回転角度情報を精度良く生成することができる操舵角センサを提供する。
【解決手段】ステアリングホイールの回転に伴って回転する環状駆動ギヤ21と、それぞれマグネットが設けられて前記環状駆動ギヤ21の回転に応じて従動回転する第1の従動ギヤ25及び第2の従動ギヤ27と、を備え、前記第1の従動ギヤ25及び前記第2の従動ギヤ27の回転に基づく磁界の変化により前記ステアリングホイールの回転角度情報を生成するための操舵角センサにおいて、前記環状駆動ギヤ21と、前記第1の従動ギヤ25及び前記第2の従動ギヤ27と、の間に、それぞれのギヤ25、27と噛み合う中間ギヤ23を介在させる。
(もっと読む)
エンコーダ
【課題】被計測物の絶対位置を高精度に計測可能なエンコーダを提供する。
【解決手段】エンコーダ100は、被計測物とともに移動可能に構成されたスケール1と、異なるピッチのパターンを有するトラック11と、スケール1に対する相対的な変位を検出して第1および第2の2相正弦波信号を出力する第1および第2のセンサ21、22と、第1および第2の2相正弦波信号に基づいて前記第1および第2のセンサ21、22に対応する第1および第2の位相をそれぞれ算出する位相演算手段31、32、61、62と、第1および第2の位相の位相差に基づいて被計測物の粗位置を計測する粗位置計測手段41と、被計測物の粗位置に基づいて第1および第2の2相正弦波信号に含まれる位相差誤差を補正する補正手段51、52と、補正手段51、52で補正された第1および第2の2相正弦波信号に基づいて被計測物の絶対位置を計測する位置計測手段71とを有する。
(もっと読む)
交流発電機の位相検出装置及びその方法
【課題】従来より、蓄電池スタンバイによるリーク電流が増加し、特に高温の環境下において整流素子のリーク電流が大幅に向上することによって、車両における電池(又は蓄電池)のスタンバイ時間が低下し、さらに車両がスムーズに起動できない問題がある。本発明は、車両における蓄電池のリーク電流を低く制御することができる交流発電機の位相検出装置及びその方法を提供する。
【解決手段】本発明は、波形検出器、閾値電圧生成器及びコンパレータを含む交流発電機の位相検出装置を提供する。波形検出器は、位相信号のピークを検出することにより波形検出信号を生成する。閾値電圧生成器は、波形検出信号に基づいて参照信号を生成する。コンパレータは、位相信号及び参照信号を比較することにより比較信号を出力する。従って、本発明に係る交流発電機の位相検出装置により、車両における蓄電池のリーク電流を低く制御することができる。
(もっと読む)
位置検出装置
【課題】 特に、従来に比べてコストを抑えるとともに信頼性に優れた位置検出装置を提供することを目的とする。
【解決手段】 シフトレバー2と、シフトレバー2の上端部に設けられたシフトノブ10と、下端部に設けられた電極部21と、シフトレバー2を回動可能に支持する動作支点25と、電極部21と非接触にて配置された静電容量結合型センサ20と、を有する。シフトノブ10の移動操作によりシフトレバー2が回動して電極部21が前記静電容量結合型センサ20の表面を非接触を保って移動し、静電容量結合型センサ20では、電極部21の移動に伴う静電容量変化に基づいて、電極部21の位置を検出する。これによりシフトポジション情報及び各シフトポジション間の軌跡情報を取得することができる。
(もっと読む)
1 - 20 / 321
[ Back to top ]