
Fターム[2F077AA24]の内容
感知要素の出力の伝達及び変換 (32,270) | 目的、特徴、課題 (5,635) | 装置の二重化、バックアップ手段 (129) | 電源、停電対策 (50)
Fターム[2F077AA24]に分類される特許
1 - 20 / 50
位置検出装置
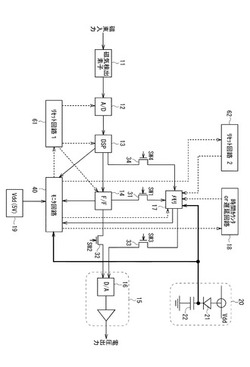
【課題】記憶回路の冗長性を確保すると共に、電源電圧が低下した場合に所望の出力を得ることの可能な位置検出装置を提供する。
【解決手段】位置検出装置としての磁気検出IC10は、通常動作モードの際、磁気検出素子11から出力された信号をDSP13によって処理した後、F/F14に記憶し、D/A16を経由して外部へ出力する。その際、F/F14の出力値をメモリ17が記憶する。モニタ回路40は、電源瞬断モードを検知すると、F/F14とメモリ17との間の信号、およびF/F14とD/A16との間の信号を遮断する。そして更新を止めたメモリ17の信号をD/A16へ出力する。一方、モニタ回路40は、長時間電源落ち込みモードを検知すると、メモリ17の信号をHiまたはLoに固定し、D/A16へ出力する。
(もっと読む)
ブラシレスDCモータの回転子位置検出方法とその装置

【課題】 3つのホールセンサの信号出力とパルス交番信号の、合計4つの信号の値から、2相エンコーダの出力に相当する信号を生成することによって、モータ回転子の回転方向を判別することができるブラシレスDCモータの回転子位置検出方法とその装置を提供する。
【解決手段】 3つのホールセンサ2U,2V,2W信号の現在値と、その1つ前の値とから、前記回転子の回転方向を判別し、前記3つのホールセンサ2U,2V,2Wのうち、いずれか1つの立ち上がりエッジまたは、立ち下がりエッジを基準位置とし、かつ、この基準位置として立ち上がりエッジを選択するか、あるいは、立ち下がりエッジを選択するかは、前記回転子の回転方向によって決定して、前記基準位置を通過する度に交番する交番信号を生成し、前記3つのホールセンサ2U,2V,2Wの信号と、前記交番信号とから、2相エンコーダ出力相当のパルス信号を生成し、このパルス信号によって前記回転子位置を検出する方法。
(もっと読む)
変位検出装置、車両用操舵装置及びモータ
【課題】検出精度を低下させることなく、装置全体としての回路規模をより縮小することができる変位検出装置、車両用操舵装置及びモータ。
【解決手段】モータ回転角センサ16は、複数のホール素子HA〜HCと、これら複数のホール素子HA〜HCを動作させるための電力供給をそれぞれ遮断可能な複数のスイッチSWA〜SWCとを備える。
(もっと読む)
エンコーダ及びエンコーダシステム
【課題】 バックアップ中の消費電力を予め試験等により求める必要がなく、バッテリ寿命を正確に算出し、算出したバッテリ寿命に応じて適切に警告を外部へ出力することできるエンコーダを得る。
【解決手段】 主電源が遮断されている時間とバッテリ4の出力電圧から求めるバッテリ残容量とに基づき、主電源が遮断されている間のバッテリ4の消費電力を算出するとともに、このバッテリ4の消費電力と、主電源が再投入された後のバッテリ4の残容量とを用いて、バッテリ4がエンコーダ3をバックアップすることが可能な時間を算出し、外部へ警告を出力するバッテリ寿命判断部7を備える。
(もっと読む)
多回転アブソリュート回転角検出装置
【課題】モータ出力軸に連結されたモータ回転軸の多回転アブソリュート回転角を高精度に計算する方法を提供する。
【解決手段】本発明に係る計算方法を用いる回転角検出装置は、モータ回転軸の回転角θ1に対して第n回転軸の回転角θnがθn=(−(m±1)/m)n−1×θ1を満たすことを特徴とする。この関係を満たすギア機構において、第1回転軸の多回転回転角を第1回転軸の回転角度である第1回転軸の検出値p1と第1回転軸の回転数に対応するR0×m0+R1×m1+・・・Rn−2×mn−2とに展開し、各軸の角度検出器の検出値に基づいて係数R0〜Rn−2を求め、第1回転軸の多回転回転角を計算する。第2回転軸以降の角度検出器で生じた検出誤差を有効に抑圧することができ、高精度な多回転回転角を計算することができる。また、複数系列のギア機構を並列に設け、それらのギア機構から得られる検出値に基づき、より広い回転角検出範囲を達成することができる。
(もっと読む)
位置検出装置
【課題】電源電圧が低下した場合の挙動仕様を共通にすることの可能な位置検出装置を提供する。
【解決手段】ホール素子の電圧信号を処理する信号処理回路から出力された電圧信号がバッファアンプ65によって緩衝増幅され、出力端子41を通じてECUに伝送される。電流検出回路67は出力端子41を流れる電流の向きを検出する。電源電圧検出回路68はホールICに供給される電源電圧の低下を検出する。電源電圧が低下したことを示す信号が電源電圧検出回路68から出力されると、電圧切替回路69は、出力端子41からECUに出力される電圧信号を電流検出回路67の検出した電流の向きに応じて高電圧側又は低電圧側にする。これにより、ECUの受け回路に設けられたプルアップ抵抗又はプルダウン抵抗に対応する電圧信号がECUに出力される。
(もっと読む)
アブソリュートエンコーダ
【課題】バッテリの電極に形成される皮膜によって生じる内部抵抗の増大を、容易な方法で皮膜を除去してバッテリの長寿命化を図ることが可能なアブソリュートエンコーダを提供する。
【解決手段】電源オフ時にもバッテリを用いてモータの回転情報を検出するアブソリュートエンコーダにおいて、前記バッテリの電圧低下を検出する異常電圧検出手段と、バッテリに蓄積された電荷を強制的に放電する放電回路と、アブリュートエンコーダと制御装置間でお互いの情報および指令を送受信する情報送受信手段と、前記制御装置が前記アブソリュートエンコーダからの情報を表示する状態観測手段と、外部からの入力によって前記放電回路に強制放電の指令を生成する指令生成器からなり、外部からの入力によって前記指令生成器が前記放電回路に強制放電の指令を出力し、前記バッテリに蓄積された電荷を放電する。
(もっと読む)
アングルセンサ及び電動パワーステアリング装置
【課題】イグニション・オフ時においてもステアリングホイールの操舵角度に関連する情報を取得し続けることができるアングルセンサ及びこれを備えた電動パワーステアリング装置を提供する。
【解決手段】ステアリングシャフト2の回転角度に関連する情報を取得する角度情報取得手段(モータ回転角度センサ11)を備え、外部から供給される電力により作動するとともに外部から制御指令が送出された場合に角度情報取得手段で取得した情報を外部に出力するアングルセンサ10であって、制御指令が解除された場合に角度情報取得手段で取得した情報を記憶する記憶手段(集積回路12)を備える。電動パワーステアリング装置1は、アングルセンサ10で取得した情報に基づいてステアリングホイール3の操舵角度を算出するコントロールユニット20を備える。
(もっと読む)
アングルセンサ及び電動パワーステアリング装置
【課題】長い待機時間や複雑な調整作業を要することなくステアリングシャフトやモータの回転角度を検出することができるアングルセンサ及びこれを備えた電動パワーステアリング装置を提供する。
【解決手段】ステアリングシャフト2の回転角度に関連する情報を取得する角度情報取得手段(モータ回転角度センサ11)を備え、外部から指令が送出された場合に角度情報取得手段で情報を取得するアングルセンサ10である。角度情報取得手段は、MR素子又はHall素子を有し、外部から間欠的に供給される電力による作動する。電動パワーステアリング装置1は、アングルセンサ10で取得した情報に基づいてステアリングホイール3の操舵角度を算出するコントロールユニット20を備える。
(もっと読む)
アングルセンサ及び電動パワーステアリング装置
【課題】消費電力を節減しながら必要なタイミングで作動してシャフトの回転角度を検出することができるアングルセンサ及びこれを備えた電動パワーステアリング装置を提供する。
【解決手段】ステアリングシャフト2の回転角度に関連する情報を取得する角度情報取得手段(モータ回転角度センサ11)を備え、外部から指令が送出された場合に角度情報取得手段で情報を取得するアングルセンサ10である。角度情報取得手段は、外部から間欠的に供給される電力により作動するとともに、ステアリングシャフト2の回転角速度に応じて作動時間が変化するように構成される。電動パワーステアリング装置1は、アングルセンサ10で取得した情報に基づいてステアリングホイール3の操舵角度を算出するコントロールユニット20を備える。
(もっと読む)
磁気式アブソリュートエンコーダー
【課題】電磁ブレーキ付きモーターの回転位置を検出する磁気式アブソリュートエンコーダーの検出精度および信頼性を高めること。
【解決手段】磁気式アブソリュートエンコーダー20は2対のホール素子31〜34を備えた多極磁気エンコーダー21と2対のホール素子41〜44を備えた2極磁気エンコーダー22を備え、電磁ブレーキ9に隣接配置されている。各ホール素子31〜34の検出信号を合成することにより2極磁気エンコーダー22および電磁ブレーキ9の洩れ磁束によるノイズを除去し、ホール素子41〜44の検出信号を合成して電磁ブレーキ9の洩れ磁束によるノイズを除去して検出精度を確保している。多極および2極の磁気エンコーダーの検出信号から算出したモーター回転軸の回転位置を比較して異常の発生を監視し、検出動作の信頼性を確保している。
(もっと読む)
アブソリュートエンコーダ及び絶対位置検出装置、並びにアブソリュートエンコーダの信号パターン配置作成方法
【課題】トラック数を増やさなくても高分解能なアブソリュートエンコーダ、絶対位置検出装置、及びアブソリュートエンコーダの信号パターン配置作成方法を提供する。
【解決手段】信号パターンを読み取り可能なセンサと、センサと相対的に移動可能とされ、センサに読み取られてK(K>2)段階に分かれてセンサ出力される信号パターンを有する信号トラックを含む基体と、を含むアブソリュートエンコーダとする。また、前記アブソリュートエンコーダと、センサ出力の検出結果に基づいて、センサと基体との絶対位置を算出する演算装置とを有する絶対位置検出装置とする。
(もっと読む)
移動する構成要素の位置を磁気的に感知するシステムおよび方法
【課題】ロッドの強度に悪影響をもたらさず、磁気的に符号化された信号が消去されることのないピストンロッド感知システムを提供する。
【解決手段】ピストンロッド上の磁気的硬質層の領域の複数のトラック上に情報が磁気的に記録されている。磁場センサーが、磁気的に記録された領域の複数トラックに配置されている。複数トラックに配置された各磁場センサーは、ピストンロッドがシリンダに対して動く間、同一の磁化領域を感知する。別の磁場センサーは、同相除去を実施する際に使用する周囲場を感知することができる。書込みヘッドが、磁場センサーによって検出された損傷または消去された領域を動的に修復することができる。磁気的に記録された情報は相対符号化されている。バッテリーバックアップ電源によって活性化されて、磁場センサーと関係する回路は、機械装置がオフの間に引き続いてピストンロッドの動きを追跡することができる。
(もっと読む)
ポジションセンサ
【課題】複数の磁石のうち特定の一つの磁石が機能しなくなった場合でも、操作ポジションを好適に検知することが可能なポジションセンサを提供すること。
【解決手段】磁石31とホールIC41、43、45とにより第1のグループが構成されるとともに、磁石32とホールIC42、44、46とにより第2のグループが構成されている。第1のグループに属するホールIC41、43、45は、同グループに属する磁石31から発生する磁束の変化を検知することで、操作ポジションを検知する。一方、第2のグループに属するホールIC42、44、46は、同グループに属する磁石32から発生する磁束の変化を検知することで、操作ポジションを検知する。
(もっと読む)
回転角検出装置及び電動パワーステアリング装置
【課題】高い検出精度を有するとともに、構成簡素且つ省電力にて、連続的に検出対象の絶対角を検出することのできる回転角検出装置を提供すること。
【解決手段】ECU11(マイコン21)は、ステアリングセンサが出力する正弦信号S_sin及び余弦信号S_cosに基づいて、絶対角である操舵角θsを検出する。また、ECU11は、正弦信号S_sin及び余弦信号S_cosに基づいて、所定の回転角(電気角)に対応したエッジを有するとともにそれぞれの各エッジに対応する所定の回転角が互いに重複することなく且つ均等間隔となるように設定された三相のパルス信号P1,P2,P3を生成する三相パルス生成器30を備える。そして、マイコン21は、これらの各パルス信号P1,P2,P3に基づいて操舵角(第2操舵角θs´)を演算する第2の回転角検出手段としての機能を備える。
(もっと読む)
マルチ・ターン回転伝送器
【課題】マルチ・ターン・ユニットの状態を確実に特定する。
【解決手段】マルチ・ターン回転伝送器は、回転軸Wの1回転内の角度を計測するシングル・ターン・ユニット10と、回転数を測定する2つのマルチ・ターン・ユニット20、30を備える。シングル・ターン・ユニットは、コード支持体11と、シングル・ターン位置信号SPをシングル・ターン符号語SCへ処理するためのシングル・ターン評価ユニット14を含む。2つのマルチ・ターン・ユニットはそれぞれ、マルチ・ターン・コード支持体21、31.1(及び31.2)と、生成されたマルチ・ターン位置信号MP1、MP2を、入力軸Wの回転数を表すマルチ・ターン符号語MC1、MC2へ変換するためのマルチ・ターン評価ユニット24、34を含む。2つの独立生成のマルチ・ターン符号語により、マルチ・ターン・ユニットの機能を特定する。
(もっと読む)
回転位置検出器
【課題】原点復帰を行うことなく簡単な構造で電力の再供給時における回転軸の回転角度及び回転数を検出することができる回転位置検出器を提供する。
【解決手段】回転位置検出器Sは、回転軸Nと一体回転する第1磁石12と、回転軸Nの回転角度を検出する第1エンコーダチップ15と、回転軸Nの回転に伴い回転する従動軸17と、従動軸17を減速させる減速機構Gとを備える。回転位置検出器Sは、従動軸17と一体回転する第2磁石19と、従動軸17の回転角度を検出する第2エンコーダチップ21とを備える。回転位置検出器Sは、電力供給時には、第1エンコーダチップ15の検出結果に基づき回転軸Nの回転角度及び回転数を検出する一方で、電力の再供給時、第1エンコーダチップ15の検出結果に基づき回転軸Nの回転角度を検出するとともに、第2エンコーダチップ21の検出結果と減速機構Gの減速比に基づき回転軸Nの回転数を算出する制御部を備える。
(もっと読む)
絶対位置検出装置及び検出方法
【課題】例えば自動搬送車の正確な絶対位置を検出できると共に、電源遮断や緊急停止した後に再起動し易い絶対位置検出装置及び検出方法を提供する。
【解決手段】予め設定された分解能のアブソリュートエンコーダを所定数並べた第1のエンコーダ列10と、第1のエンコーダ列におけるアブソリュートエンコーダの数の差を1とした第2のエンコーダ列20とをそれぞれのエンコーダ列の両端部が長手方向において合致するように並列配置し、第1のエンコーダ列及び第2のエンコーダ列の双方に沿って移動する共通移動子300を設け、第1のエンコーダ列の出力と第2のエンコーダ列の出力から共通移動子の絶対位置を検出するようになっている。
(もっと読む)
エンコーダ装置
【課題】 エンコーダの内部に大容量コンデンサを内蔵せずにバックアップする必要のあるデータを保持し、動作可能状態にしておく必要のある回路を動作状態のまま、バックアップ電源を交換可能とし、バッテリーの寿命を検出してからバックアップ電源の動作期間が長く、データ消失の危険の少ないエンコーダ装置を提供する
【解決手段】 被測定物の変位量を測定するエンコーダ本体と、このエンコーダ本体に電源を供給する主電源のバックアップ用電源を供給するバックアップ電源1とを有し、前記バックアップ電源1は、バックアップ電源部出力端における規定電圧として第1のバックアップ電圧Vout1を供給する第1のバッテリーBAT1と、この第1のバッテリーの出力電圧Vbat1が低下したときに第1のバックアップ電圧Vout1と同等かそれより低い第2のバックアップ電圧Vout2を供給する第2のバッテリ−BAT2とを有する構成のエンコーダ装置とした。
(もっと読む)
レゾルバ信号処理装置および操舵装置
【課題】増幅手段への印加電圧が低下する場合でも回転角の検出精度の低下を抑制し得るレゾルバ信号処理装置および操舵装置を提供する。
【解決手段】レゾルバ信号処理装置として機能するECU40では、バッテリBの電源電圧Vbが閾値電圧Vp以下になると、ゲインGを電源電圧Vbの低減に応じて低減させることにより、モータ32のモータ回転角θmを検出するレゾルバ33に入力される励磁信号の振幅を、電源電圧Vbの低減に応じて低減する。
(もっと読む)
1 - 20 / 50
[ Back to top ]