
Fターム[2F077DD05]の内容
感知要素の出力の伝達及び変換 (32,270) | 機械的手段による変換(伝達) (322) | 歯車装置を用いるもの (221)
Fターム[2F077DD05]の下位に属するFターム
Fターム[2F077DD05]に分類される特許
1 - 20 / 167
回転角度検出装置
回転角度検出装置
多回転アブソリュート回転角検出装置及びアブソリュート回転角を検出する方法
【課題】主軸の回転角度検出方法で、広い多回転検出範囲を得られ、かつ、高い検出精度を達成することのできるアブソリュート回転角検出方法と、多回転アブソリュート回転角検出装置を提供する。
【解決手段】本検出装置は、主軸ギヤ10bと歯車接合した第1〜第3副軸ギヤを具備する歯車機構1からなり、主軸ギヤと第1副軸ギヤの歯数差は、2又はそれを越える整数aであり、また主軸ギヤと第2副軸ギヤの歯数差は、1であり、第1軸の歯数は主軸に対する歯数差と主軸検出器の軸倍角の積の整数倍の関係を有する。各軸の回転角を角度検出器RS0〜RS3で検出する。主軸の回転角度と、主軸と第1〜第3副軸との間の回転角度の差を表す周期信号値をそれぞれ生成し、各周期信号値から求められた第1〜第3副軸の相対回転数の組み合わせに基づいて主軸の回転数を求める。主軸の回転数に回転角度を加えて多回転アブソリュート回転角を得ることができる。
(もっと読む)
センサ装置

【課題】回転軸に付与されるトルク、及び回転軸の回転角を検出する場合であれ、回転軸の軸方向において小型化を図ることのできるセンサ装置を提供する。
【解決手段】このセンサ装置14は、トーションバー22を介して互いに連結されたインプットシャフト20及びロアシャフト21に沿って配置されてインプットシャフト20に付与されるトルクを検出するトルクセンサ40と、各シャフト20,21の径方向におけるトルクセンサ40の外周に近接して配置される回転角センサ50とを備える。この回転角センサ50は、ロアシャフト21の回転に基づいて回転する検出ギア52と、検出ギア52の回転角を検出する部分であるセンサ本体51とを備える。そして、回転角センサ50は、センサ本体51を通じて検出される検出ギア52の回転角に基づきロアシャフト21の回転角を検出する。
(もっと読む)
回転角度検出装置及びこれを用いた回転角度検出システム
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置、及びこれを用いた回転角度検出システムに関し、簡易な構成で、確実な回転角度の検出が可能なものを提供することを目的とする。
【解決手段】回転角度検出装置13と13Aの制御手段12と12Aが、算出した回転角度を各々異なる所定時間後に出力すると共に、これらを接続し、他からの回転角度を検知した場合には、回転角度を出力しないように形成することによって、複数の回転角度検出装置13や13Aを用いた場合でも、車両の電子回路11には一つの回転角度の信号しか入力されないため、電子回路11の負荷が少なくなると共に、万が一、一方に故障等が生じた場合でも、他方からは回転角度が出力されるため、簡易な構成で、確実な回転角度の検出が可能なものを得ることができる。
(もっと読む)
エンコーダ装置及びエンコーダ装置の回転情報検出方法
【課題】外部バッテリを用いずに、多回転情報を得ることができるエンコーダシステム及び信号処理方法を提供すること。
【解決手段】所定の回転軸を中心として回転する回転部と、当該回転部の第一回転情報を検出する第一検出部と、当該第一検出部とは別に回転部の第二回転情報を検出する第二検出部と、第一検出部又は第二検出部における検出結果の異常の有無を検出する制御部とを備える。
(もっと読む)
位置検出装置、位置検出方法及び撮像装置
【課題】 小型化及び製造コストの低減を図った上で高分解能で高精度な可動レンズの位置検出を行う。
【解決手段】 所定の方向へ動作され連続的に増加又は減少する信号を出力して光軸方向へ移動される可動レンズの絶対位置を検出する第1の検出センサーと、所定の方向へ動作され周期的かつ連続的に変化する信号を出力して前記可動レンズの相対位置を検出する第2の検出センサーとを設け、前記第1の検出センサーと前記第2の検出センサーを異なら動作速度で動作するようにした。
これにより、第2の検出センサーの着磁ピッチを大きくしたり、第1の検出センサーとしてリニアリティー誤差やヒステリシスの小さいものを用いる必要がなく、小型化及び製造コストの低減を図った上で高分解能で高精度な可動レンズの位置検出を行うことができる。
(もっと読む)
操舵角センサ
【課題】環状駆動ギヤの真円度によって、第1の従動ギヤ及び第2の従動ギヤに生じる回転角度の誤差の影響が小さくされて、ステアリングホイールの回転角度情報を精度良く生成することができる操舵角センサを提供する。
【解決手段】ステアリングホイールの回転に伴って回転する環状駆動ギヤ21と、それぞれマグネットが設けられて前記環状駆動ギヤ21の回転に応じて従動回転する第1の従動ギヤ25及び第2の従動ギヤ27と、を備え、前記第1の従動ギヤ25及び前記第2の従動ギヤ27の回転に基づく磁界の変化により前記ステアリングホイールの回転角度情報を生成するための操舵角センサにおいて、前記環状駆動ギヤ21と、前記第1の従動ギヤ25及び前記第2の従動ギヤ27と、の間に、それぞれのギヤ25、27と噛み合う中間ギヤ23を介在させる。
(もっと読む)
エンコーダ
【課題】歯車機構を備えた位置検出装置と光学式エンコーダ装置とを備えたエンコーダを提供する。
【解決手段】ハウジング3が第1の収納部11と第2の収納部13との間に軸受けホルダ9を備えている。軸受けホルダ9は、歯車機構21と光学式エンコーダ装置7とを隔離する隔壁部を構成する。歯車機構21と光学式エンコーダ装置7とを隔離すると、歯車機構21から発生する磨耗粉やグリスが飛散して、光学式エンコーダ装置7の構成部品に付着することを確実に防止することができる。
(もっと読む)
アブソリュート変位量を算出する装置及びその方法
【課題】本発明は、移動体のアブソリュート変位量を検出することを課題とする。
【解決手段】変位量を検出する実施例では、主軸の多回転アブソリュート回転角を主軸及び副軸に結合された角度センサによって検出された回転角度から算出する。回転駆動源11に結合された主軸12の回転は予め定める変速比で副軸13,14に伝達される。主軸12及び副軸13,14の回転角度Ss,Sp,Sqは、角度センサ15a,15b,15cによって検出され、それらはAD変換角度計算部16で角度検出値θs,θp,θqとしてそれぞれ同期化/整数化処理部17に送られ、整数化された周期信号p,qが算出される。周期信号p,qは、周期演算部18にそれぞれ送られ、主軸の周期信号rが算出される。主軸の多回転アブソリュート回転角θcは、回転角合成部19で主軸の周期信号r及び主軸の角度検出値θsに基づいて、算出される。本発明は、直線移動する移動体の変位量を検出する装置にも適用することができる。
(もっと読む)
後輪転舵装置
【課題】後輪舵角の中立位置の検出精度を向上させて、良好な車両直進性能を得る。
【解決手段】転舵ロッド31の軸線方向の移動によりロータが回転するレゾルバ60を設ける。レゾルバ60は、後輪舵角が中立位置となるときの電気角が0度、90度、180度、270度の何れかになるようにステータに対するロータの回転位置が設定されている。これにより、後輪舵角の中立位置において、レゾルバ60の2相検出信号から計算される電気角θeに誤差が発生しなくなり、後輪舵角を中立位置に維持することができる。この結果、車両の直進性能が向上する。
(もっと読む)
原点位置検出機構
【課題】本発明は、入力軸と出力軸との間に減速ギア機構を設けると共に、入力軸側と出力軸側に設けたホール素子からの各原点検出信号を用いて出力軸の原点位置を検出することを目的とする。
【解決手段】本発明による原点位置検出機構は、第1原点位置(11a)を検出した第1ホール素子(11)からの第1原点検出信号(11A)と第2原点位置(12a)を検出した前記第2ホール素子(12)からの第2原点検出信号(12A)とのAND信号(20)によって出力軸(4)の第2原点位置(12a)を検出する構成である。
(もっと読む)
インダクタンス式回転角度検出装置及びそれを備えたモータ駆動式の絞り弁制御装置
【課題】スロットルセンサロータと微小な空間を隔てて設けられたスロットルセンサ基板回路に接続されたターミナルに静電気を与えた際、静電気がスロットルセンサ基板回路とスロットルセンサロータ間の微小な空間を介し、スロットルセンサロータ,スロットルシャフト側に放電することにより電流が生じ、スロットルセンサ基板回路が破損してしまう。
【解決手段】スロットルセンサロータ搭載位置を樹脂製の中間ギア上に設けることで、金属製スロットルセンサロータを樹脂にて金属製部品と絶縁する。
【効果】スロットルセンサロータを前記中間ギア上に設けることで、スロットルセンサ基板回路から金属製スロットルセンサロータを介しスロットルセンサロータが接触している他の部品への放電を防ぐことができ、電流発生により生じるスロットルセンサ基板回路の破損を防ぐことができる。
(もっと読む)
回転角検出装置
【課題】構成部材の組み付けの確認作業を容易に行うことができる回転角検出装置を提供する。
【解決手段】主動ギア、従動ギア50、磁石60と、磁気センサ81と、従動ギア50の回転軸方向への移動を規制するホルダ70と、これらを収容するケース20とを備える回転角検出装置において、従動ギア50は、ケース20に回転可能に軸支され、ホルダ70は、従動ギア50の軸受と反対側の部位に接触した状態で装着され、カバー30のホルダ70に対向する部位には、弾性変形可能とされた規制部材35を設け、カバー30を軸受と反対側からホルダ70に対向してケース20に取り付けたとき、規制部材35は、ホルダ70が存在しない場合には、従動ギア50と係合してこれの回転を規制する一方、ホルダ70が存在するときには、ホルダ70との接触により弾性変形して従動ギア50とは係合しない回転角検出装置。
(もっと読む)
多回転アブソリュート回転角検出装置
【課題】モータ出力軸に連結されたモータ回転軸の多回転アブソリュート回転角を高精度に計算する方法を提供する。
【解決手段】本発明に係る計算方法を用いる回転角検出装置は、モータ回転軸の回転角θ1に対して第n回転軸の回転角θnがθn=(−(m±1)/m)n−1×θ1を満たすことを特徴とする。この関係を満たすギア機構において、第1回転軸の多回転回転角を第1回転軸の回転角度である第1回転軸の検出値p1と第1回転軸の回転数に対応するR0×m0+R1×m1+・・・Rn−2×mn−2とに展開し、各軸の角度検出器の検出値に基づいて係数R0〜Rn−2を求め、第1回転軸の多回転回転角を計算する。第2回転軸以降の角度検出器で生じた検出誤差を有効に抑圧することができ、高精度な多回転回転角を計算することができる。また、複数系列のギア機構を並列に設け、それらのギア機構から得られる検出値に基づき、より広い回転角検出範囲を達成することができる。
(もっと読む)
回転角度検出装置
【課題】自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、検出する回転角度の誤差が少なく確実な角度検出が可能なものを提供することを目的とする。
【解決手段】磁石15A、15Bや磁石16A、16Bを第一及び第二の検出体12、13の回転中心C1、C2から所定間隔離れて対面配置すると共に、第一及び第二の検出体12、13の回転中心C1、C2上に磁気検出素子7、8を対向配置することによって、磁石15A、15Bや磁石16A、16Bの間に発生する直線状の磁力線の範囲が拡がるため、磁気検出素子7、8の位置ズレが多少生じても、検出信号の誤差が小さく、検出される回転角度の誤差を少なくすることができる。
(もっと読む)
回転角度検出装置
【課題】自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、部品点数が少なく安価なものを提供することを目的とする。
【解決手段】カバー20に外方開口の略箱状で、側壁部20Bに端子21が内外方に貫通したコネクタ部20Aを一体に形成すると共に、内方の端子21の接続部21Aに配線基板17を接続することによって、カバー20にコネクタ部20Aが一体に形成されているため、部品点数が少なく安価な回転角度検出装置にすることができる。
(もっと読む)
レゾルバ装置
【課題】簡素な構造で信頼性を向上したレゾルバ装置を提供する。
【解決手段】レゾルバ装置は、螺旋状の凹凸により螺旋形状部が形成されたレゾルバロータと、レゾルバロータの回転により、螺旋形状部の凸部との距離が変わる位置に配置されたレゾルバステータと、を有する。例えば、レゾルバロータは、外周部に螺旋形状部を有する。あるいは、例えば、レゾルバロータは、中空円筒体であって、中空円筒体の内周部に螺旋形状部を有する。
(もっと読む)
角度検出器及び電動パワーステアリング装置
【課題】 製造コストを低減可能な角度検出器等を提供する。
【解決手段】 角度検出器100は、第1の回転体12と、第2の回転体32と、前記第1の回転体及び前記第2の回転体を連結する連結部22と、前記第1の回転体と連動する第1の副回転機構13と、前記第1の副回転機構の回転状態を検出する第1の検出機構14と、前記第2の回転体と連動する第2の副回転機構33と、前記第2の副回転機構の回転状態を検出する第2の検出機構34と、前記第1の副回転機構の回転状態と前記第2の副回転機構の回転状態とに基づき前記連結部のねじれ状態を演算する第1の演算部42と、前記第1の回転体と連動する仮想の副回転機構15の回転状態と前記第1の副回転機構の回転状態とに基づき前記第1の回転体の回転角を演算する第2の演算部44とを備える。仮想の副回転機構15の回転状態は、連結部22のねじれ状態に基づく。
(もっと読む)
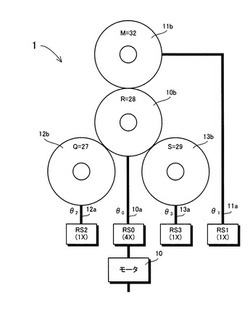
多回転アブソリュート回転角検出装置
【課題】モータ出力軸に連結されたモータ回転軸の多回転アブソリュート回転角を検出することのできる装置を提供する。
【解決手段】本発明に係る回転角検出装置は、モータ回転軸の回転角θ1に対して第n回転軸の回転角θnがθn=(−(m±1)/m)n−1×θ1を満たすことを特徴とする。この関係を満たす機構を実現する実施例として、回転角検出装置は、第1回転軸から第n回転軸の隣接する回転軸間で、歯数(m±1)のギアが歯数mのギアと噛み合うギア機構が形成される。
(もっと読む)
1 - 20 / 167
[ Back to top ]