
Fターム[2F112CA04]の内容
光学的距離測定 (16,745) | 対象、用途 (2,011) | 具体的に適用対象が特定されているもの (958) | ロボット、工作マシン等 (107)
Fターム[2F112CA04]に分類される特許
1 - 20 / 107
光学式変位センサ
【課題】ノイズ光が入射した場合に誤った計測が行われるのを防止して、計測の精度を確保する。
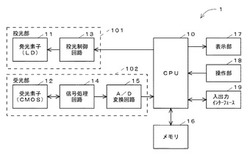
【解決手段】検出用の光を投光する投光部101と、投光された光に対する反射光を受光する受光部102と、変位を計測する計測処理部として機能するCPU10とを具備するセンサ1のCPU10に、受光量の変化を表すパラメータまたは受光量の増減に応じて調整される感度を示すパラメータの値があらかじめ定めた許容範囲に入るか否かを判別する判別手段の機能を付与する。CPU10は、判別対象のパラメータの値が許容範囲に入っていると判別した場合には、計測処理を行って結果を出力するが、判別対象のパラメータの値が許容範囲を逸脱すると判別した場合には、計測結果が出力されないように制御する。
(もっと読む)
変位センサ

【課題】被測定物の表面の反射の状態によって、変位センサの測定方式を切り換えたり、変位センサを交換したりすることを不要にする。
【解決手段】拡散反射板212は、レーザ光源231から出射され、ワーク102の加工面で正反射されたプローブ光が入射する位置に配置されている。リニアセンサ233は、拡散反射板212により拡散反射されたプローブ光がさらにワーク102の加工面で反射された第1の反射光、レーザ光源231から出射されたプローブ光がワーク102の加工面で拡散反射された第2の反射光を受光する。信号処理部234は、第1の反射光によりプローブ光がワーク102の加工面を介して拡散反射板212に入射するまでの第1の距離を検出するか、または、第2の反射光によりプローブ光がワーク102の加工面に入射するまでの第2の距離を検出する。
(もっと読む)
段差部認識装置
【課題】ステレオカメラにより取得されるステレオ画像を利用して、階段等の段差部の踏面の先端側エッジの空間的な位置及び方向を含む該段差部を配置位置を精度良く認識することができる装置を提供する。
【解決手段】カメラ3R,3Lのうちの基準画像に、複数条の演算処理領域R3min(k2)を設定すると共に、複数条の演算処理領域R3min(k2)のそれぞれにおける実エッジ投影線L52rの複数の候補位置v(k1)を設定し、各演算処理領域毎に、各候補位置の実エッジ投影線(段差部の先端側エッジの投影線)の位置に対する適合度を表す評価関数の値を射影変換を利用して算出する。実エッジ投影線を推定してなる推定エッジ投影線を、複数条の演算処理領域R3min(k2)のそれぞれにおける推定エッジ投影線の位置の適合度を合成してなる合成適合度が最も高くなるように決定する。推定エッジ投影線と段差部の踏面の平面パラメータとに基づいて段差部の空間的な配置を認識する。
(もっと読む)
ボンディング装置
【課題】サーチ動作又はボンディング前のボンディング点の高さ測定を行うことなしに、高速でボンディングが可能なボンディング装置を提供すること。
【解決手段】上下方向に揺動可能なボンディングアームに搭載されて、被ボンディング部品の表面に位置するボンディング点の合焦点の検出を行う共焦点光学系と、前記ボンディングアームと一体に可動してボンディングを行うボンディングツールと、前記ボンディングツールの位置を検出する位置検出手段と、を有し、ボンディングツールのボンディング点への下降中に、共焦点光学系による合焦点検出により位置検出手段で検出したボンディングツールの位置から、前もって設定したボンディング点までの所定の距離(合焦点基準下降量)をボンディングツールが下降して、ボンディング点上で停止するように制御する。
(もっと読む)
半導体装置の駆動方法
【課題】画素の微細化を達成しつつ、2次元撮像及び3次元撮像の同時撮像を可能にした半導体装置の駆動方法を提供する。また、高精度な移動体の位置検出を可能にした半導体装置の駆動方法を提供する。
【解決手段】同一の照射時間の第1の照射及び第2の照射を行い、第1の照射及び第2の照射に対応させて、第1の撮像及び第2の撮像を行い、第1の撮像及び第2の撮像において、光の到着時間の時間差に依存した第1の検出信号及び第2の検出信号を取得することで、光源から被検出物までの距離を測定する。また、可視光を吸収し、赤外光を透過する第1のフォトセンサ、及び赤外光を吸収する第2のフォトセンサを重畳することで2次元撮像及び3次元撮像の同時撮像を可能にする。また、隣接するフォトセンサで被検出物のほぼ同一点からの反射光を検出する事で、高速で移動する被検出物においても位置検出精度の低下を防げる。
(もっと読む)
対象物との相対位置計測方法と装置
【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
測距システム、画像処理装置、コンピュータプログラム及び測距方法
【課題】撮影部と表示部とを有する携帯端末で、それらの端末間の距離を計測する測距システムを提供する。
【解決手段】 測距システム(100)は、所定の時系列で所定の図形を表示する表示部(51B)を有する計測対象物(50B)と、所定の図形を撮影する撮影部(53A)と、撮影部(53A)により撮影された所定の図形と予め記憶された所定の図形の設計値とに基づいて、計測対象物から撮影部までの距離を計測する距離計測部(576)と、を備える。
(もっと読む)
把捉物位置認識装置、把捉物位置認識方法、把捉物位置認識プログラム
【課題】把捉対象である記憶媒体の把捉機構に対する相対位置を正確に把握する。
【解決手段】記憶媒体がハンド機構10に対して近づくまたは遠ざかる方向を当該記憶媒体の奥行き方向として、カメラ部20により撮影された画像を解析した結果に基づき記憶媒体の画像内の位置に係る特徴物情報を検出し、記憶媒体の奥行き方向における位置を特徴物情報に1対1対応した奥行き位置情報として導出する演算処理機構30を備えたことを特徴とする把捉物位置認識装置。
(もっと読む)
光学的情報読取装置
【課題】測距処理の高速化を図り、確実に測距を行うことができる光学的情報読取装置を提供する。
【解決手段】光学的情報読取装置1Aは、光の照射領域102aと非照射領域103aが組み合わせられた測距パターン101aを読取対象物に形成する測距光Saを出射する測距光出射部2を備え、読取対象物に形成された測距パターン101aを固体撮像素子3で撮像して測距パターン101aの画像を取得し、画像信号で信号が落ち込む部分を検出して、測距パターン101aの非照射領域103aの座標に基づき測距を行う。
(もっと読む)
形状計測装置、ロボットシステムおよび形状計測方法
【課題】計測対象物の走査に要する合計の時間を短くすることが可能な形状計測装置を提供する。
【解決手段】このセンサユニット(形状計測装置)4は、レーザ光を照射するレーザ発生器15と、レーザ発生器15から照射されたレーザスリット光をワーク200の載置されている領域に走査するミラー部16と、ミラー部16から照射され、計測対象物により反射されたレーザ光の反射光を検出することにより、ワーク200の載置されている領域を検出するとともに、ワーク200の3次元計測を行う高速カメラ11と、高速カメラ11によって検出されたワーク200の載置されている領域に応じてミラー部16による走査範囲を変更するように制御するセンサコントローラ13とを備える。
(もっと読む)
距離センサ及び距離画像センサ
【課題】高感度化を図りつつ、電荷の高速転送を実現することが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】受光領域は、平面形状が第1方向で対向する一対の長辺と第2方向で対向する一対の短辺とを有する長方形状である。第1及び第2半導体領域FD1,FD2は、各長辺に沿って互いに空間的に離間して配置される。第1及び第2ゲート電極TX1,TX2は、対応する半導体領域FD1,FD2と受光領域との間に配置される。第1及び第2ポテンシャル調整電極EL1,EL2は、受光領域における第1及び第2ゲート電極TX1,TX2の間に位置する領域に重複するように配置されている。第1及び第2ポテンシャル調整電極EL1には、第1及び第2ゲート電極TX1に与えられる電荷転送信号と同じ位相であり且つ電位が低いポテンシャル調整信号が与えられる。
(もっと読む)
回折光学素子、並びに測距装置及び測距方法
【課題】ねじれビームを出射する小型の回折光学素子、並びに、小型の測距装置、及び小型の回折光学素子を用いた測距方法を提供する。
【解決手段】回折光学素子130は、x軸、y軸、及びz軸からなる座標空間において、前記x軸と平行な偏平面を形成しながら前記z軸の方向へ進行する平行光の進行方向を、前記z軸の方向へ所定の距離だけ進行した位置において、前記偏平面の前記x軸と成す回転角度が所定の角度となるように変更する第1回折格子が形成されている。
(もっと読む)
撮像面位置検出装置およびそれを具える作業ロボット
【課題】対象物の撮像面の位置を簡易かつ安価に、しかも短時間で検出する装置を提供することにある。
【解決手段】レーザ光軸が互いに交差するように配置された少なくとも3台のレーザ光照射手段と、前記少なくとも3台のレーザ光照射手段に対する所定位置で、それらのレーザ光照射手段からレーザビームを照射された対象物の表面を撮像する1台の単眼の撮像手段と、前記撮像手段が前記対象物の撮像面を撮像した1枚の画像での前記レーザビームの少なくとも3つの照射点の位置と前記撮像手段の撮像光軸との位置関係から幾何学的演算により前記撮像手段に対する前記対象物の撮像面の距離と向きとを求めて出力する演算手段と、を具えてなる、撮像面位置検出装置である。
(もっと読む)
光学式位置検出装置
【課題】測定頻度を高めることに伴って対象物体の位置検出精度を高めることのできる光
学式位置検出装置を提供すること。
【解決手段】光学式位置検出装置10において、検出用光源12が検出光L2を出射した
際に対象物体Obで反射した検出光を光検出器30で検出して対象物体Obの座標を検出
する。検出空間10Rからみたときに、光検出器30の周りで周方向で並ぶ第1検出用光
源12A、第2検出用光源12B、第3検出用光源12Cおよび第4検出用光源12Dは
、光検出器30からの距離が相違している。また、第1検出用光源12Aと第2検出用光
源12Bとを結ぶ線と、第3検出用光源12Cと第4検出用光源12Dとを結ぶ線とが非
平行で、第1検出用光源12Aと第4検出用光源12Dとを結ぶ線と、第2検出用光源1
2Bと第3検出用光源12Cとを結ぶ線とが非平行である。
(もっと読む)
カメラのミスキャリブレーションの実行時決定のためのシステムと方法
本発明は、シーン内で取得された対象について、教示された対象モデルの観察された画像データと予想された画像データとのマッチングに基づいて定義される実行時アライメント得点の履歴統計定義に基づき、典型的にカメラ外部パラメータに関して、カメラのミスキャリブレーション(精度)の実行時決定(自己診断)のためのシステムと方法を提供する。この構成は、システムのカメラがキャリブレーションされた状態に留まっているか診断するためにビジョンシステムの実行時動作を中断し、および/またはビジョンシステムよって監視されている生産ラインを停止する必要を回避する。ビジョンシステムによって検査される対象または特徴は時間が経過しても実質的に同じであるという仮定の下で、ビジョンシステムは部分アライメント結果の統計を蓄積し、中間結果を保存して現在のシステム精度の指標として使用する。マルチカメラビジョンシステムに対しては、個々の問題のあるカメラを特定するために例示的にクロス確認を用いる。このシステムと方法により、劣化するカメラキャリブレーションに関するビジョンシステムの不具合をより迅速、廉価、簡明に診断することが可能となる。 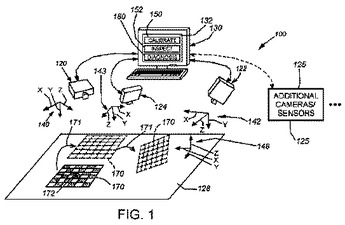 (もっと読む)
(もっと読む)
自律移動装置及びその制御方法
【課題】自己位置推定機能と足元の障害物検出機能とを良好に両立させること。
【解決手段】非接触式の距離センサ17と、移動状況に関する所定の条件に基づいて、足元の障害物検出処理か自己位置推定処理のいずれの処理を実行するか判定する判定部58と、足元の障害物検出処理を実行する場合に、距離センサ17からの測定信号の方向を足元付近に向けて変化させ、自己位置推定処理を実行する場合に、測定信号の方向を遠方の対象物を測定可能となる向きに変化させる反射部19と、距離情報に基づいて足元の障害物を検出する足元障害物検出部57と、距離情報に基づいて自己位置を推定し、移動量から求めた自己位置を、推定した自己位置を用いて補正する自己位置推定部55と、検出した障害物情報と、補正した自己位置とに基づいて、移動装置23の制御を行う走行制御部59と、を備える。
(もっと読む)
移動環境認識装置及び方法
【課題】移動体の移動対象を簡易に測定する。
【解決手段】円錐検出光DETと測定対象の表面S2との交点TRからの反射光に基づいてセンサ原点Oから測定対象S2までの距離を測定し、当該測定結果から得た交円TRの特徴量によって測定対象表面S2の形状を求めるようにしたことにより、円錐検出光DETの立体的な構成を利用して測定対象S2の形状を簡便かつ確実に測定することができる。
(もっと読む)
形状検出装置及びロボットシステム
【課題】種々の形状の検出対象物に対してもそれぞれ高速で且つ精度良く対象物の3次元形状を検出できるようにした、形状検出装置及びこれを用いたロボットシステムを提供する。
【解決手段】ランダムに配置された複数の検出対象物を収納したストッカと、ストッカ内の複数の検出対象物の画像及び距離を取得する距離画像センサと、距離画像センサの検出結果と設定されたアルゴリズムとに基づいてストッカ内の検出対象物のそれぞれの位置及び姿勢を検出するセンサコントローラと、センサコントローラが使用するアルゴリズムを選択し、センサコントローラのアルゴリズムの設定を行なうユーザコントローラとを有して構成する。
(もっと読む)
三次元形状測定装置
【課題】被測定物の奥行き方向の空間分解能を低下させずに測定範囲を拡大できる三次元形状測定装置を提供する。
【解決手段】色が規則的に経時変化するチャープ光パルスを生成する第1パルス光源30と、所定の波長の単波長光パルスを生成する第2パルス光源32と、ワーク24から反射されたチャープ光パルス110a、110bの第1反射光像を取得する反射光像取得部78と、前記第2反射光像の二次元情報を参照し、ワーク24から反射された単波長光パルス112の第2反射光像を取得する反射光像取得部78と、前記第1反射光像の二次元情報及び色情報を用いてワーク24の三次元情報を取得する三次元情報取得部80と、前記チャープ光パルスをワーク24に向けて照射するタイミングと、前記単波長光パルスをワーク24に向けて照射するタイミングとを調整するタイミング制御部70とを有する。
(もっと読む)
走査型測距装置
【課題】走査効率の高い走査型測距装置を提供する。
【解決手段】投受光部1aから投光された測定光は鏡面2aによって反射され、筐体の透過部6を通過し、測定対象空間に照射される。測定対象空間に測定対象物があると、測定対象物からの反射光は、透過部6を再度通過し、鏡面2aによって反射され、投受光部1aにて受光されることで測定対象物の位置を測定する。また、同時に他方の投受光部1b、鏡面2bでも同様に他の測定対象物の位置を測定することにより測定効率を向上することができる。
(もっと読む)
1 - 20 / 107
[ Back to top ]