
Fターム[2F112DA25]の内容
Fターム[2F112DA25]に分類される特許
541 - 559 / 559
液体ジェット器具のための光学的近接センサならびにそのようなセンサを備えた液体ジェット器具
本発明は、液体ジェット器具(1)に対して取り付けられ得るよう構成された光学的近接センサ(5)に関するものである。このセンサは、少なくとも1つの発光部材(14)および少なくとも1つの受光部材(15)が設置され、さらに、これら発光部材および受光部材により、センサと所定表面(8)との間の距離を測定し得るものとされた、プリント回路(12)と;発光部材(14)および受光部材(15)を受領するための中間部分(16)と;この中間部分をカバーする保護手段(17)と;を具備している。プリント回路(12)と中間部分(16)とには、貫通穴(18,19)が形成され、これら貫通穴(18,19)は、スプレーヘッドからの液体の噴射を可能とする通路を形成し得るよう、互いに位置合わせされている。  (もっと読む)
(もっと読む)
距離測定装置

【課題】
機械的な光路切替えを無くし、測距光の受光信号と内部参照光の受光信号との電気的な分別を可能とし、高速での測距を可能としドリフトの影響を無くして測定精度を向上させ、又測距光の受光信号と内部参照光の受光信号との分別の態様を変更可能とすることで、測定の一層の高速化、更に不要対象物による誤測定の防止等を可能とする。
【解決手段】
測定対象物にパルスレーザ光線を照射し、測定対象物で反射された外部光と内部光とを受光回路に於ける受光素子9によって受光検出し、外部光と内部光との受光に基づき測距を行う距離測定装置に於いて、前記受光回路40が非検出状態を形成し、該非検出状態が内部光の受光タイミングの前又は後に形成される。
(もっと読む)
距離画像センサ

【課題】測定可能範囲を超える対象物の検出による距離の誤測定を防止し、しかも対象物の反射率が低い場合でも測定可能範囲を比較的遠方まで広げる。
【解決手段】発光源2は対象空間に所定周期の変調信号で変調された光を照射し、光検出素子1は対象空間を撮像する。画像生成部4は、発光源2から対象空間に照射された光と対象空間内の対象物Obで反射され光検出素子1で受光される反射光との変調信号の位相差によって対象物Obまでの距離を求める。また、画像生成部4は、変調信号の周期で規定される測定可能な最大距離までの距離範囲内において対象物Obまでの距離が大きいほど小さくなるように距離に応じて設定された基準閾値と受光光量の代表値とを比較するとともに当該代表値が求めた距離に対する基準閾値より小さいときには求めた距離を距離画像の画素値として採用しないようにしてある。
(もっと読む)
測距装置
【課題】 視準光学系の倍率を変更した場合でも、レーザ光が照射される範囲を観察者が正しく認識することができる測距装置を提供する。
【解決手段】 目標物体を視準するための視準光学系の透過型液晶表示パネル7に表示される視準領域22の大きさを倍率に応じて変える。視準領域22の大きさのパターンを複数用意し、倍率に応じて選択し、透過型液晶表示パネル7に表示する。
(もっと読む)
移動再帰反射器を測定する絶対距離計
増分干渉計を使用することなく、移動外部再帰反射器またはそのほかの移動目標表面の1またはそれを超える次元の絶対距離測定および/または表面走査および/または座標測定が可能なレーザ・デバイスおよび方法。  (もっと読む)
(もっと読む)
距離画像センサ
【課題】光検出素子の飽和を防止しながらも高SN比が得られるようにして距離の測定精度を高めた距離画像センサを提供する。
【解決手段】発光源2は対象空間に所定周期の変調信号で変調された光を照射し、光検出素子1は対象空間を撮像する。画像生成部4は、発光源2から対象空間に照射された光と対象空間内の対象物Obで反射され光検出素子1で受光される反射光との変調信号の位相差によって対象物Obまでの距離を求める。光検出素子1は、異なる長さの検出期間ごとに集積した電荷を画像生成部4に与えるように電荷の転送タイミングが制御回路部3で制御される。画像生成部4は、各長さの検出期間で集積される電荷の電荷量が光検出素子1に許容された電荷量を越えない範囲で最大になる検出期間を選択し当該検出期間における電荷量を用いて距離を求める。
(もっと読む)
レーザ・パルスを用いて光学リンクを製造する方法と装置
【課題】 本発明は、移動物体の位置を定めるための光学リンクをレーザ・パルスにより製造する方法と装置に関する。
【解決手段】 本発明の特徴とするところは、上記のレーザ・パルスを多少なりとも受信器の方向へ照射し、照射の開始から経過する時間(t)の増加する関数として連続レーザ・パルス(4)のエネルギーを変化させることである。上記のレーザ・パルスの照射の開始は移動物体の発射から遅らせられる。 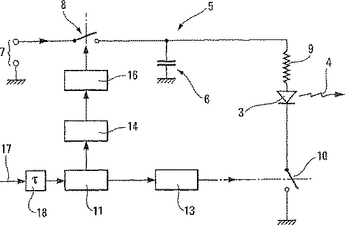 (もっと読む)
(もっと読む)
測距装置
【課題】 本発明は、測定分解能を変更することのできる測距装置を提供することを目的とする。
【解決手段】本発明の測距装置は、測距対象物に向けて所定の測定用信号を発信する発信部(110)と、前記測距対象物の方向から戻る信号を受信する受信部(120)と、前記発信部及び前記受信部を駆動する測定処理を実行し、前記受信部で受信された信号に基づいて前記測定用信号の発信から受信までの時間を検知すると共に、前記受信部が信号を受信する際の分解能を可変にする制御部(100’)とを備えたことを特徴とする。
(もっと読む)
侵入警戒センサ
【課題】施工性が良好で誤動作しにくい侵入警戒センサを提供する。
【解決手段】侵入警戒センサ1は、建物の内部に設置され、建物内への侵入路となる開口部を含めた対象空間に強度が周期的に変化する強度変調光を照射する発光源5、および、受光光量に応じた電気出力を発生する複数個の感光部が配列されて対象空間を撮像する光検出素子3を具備し、発光源5から対象空間に照射された光が対象空間内の対象物で反射され各感光部で受光されるまでの強度変調光の位相差を対象物までの距離に換算することにより画素値が距離値である距離画像を生成する距離画像センサ部2と、距離画像センサ部2から入力される距離画像より、隣接する画素間の画素値の差が所定のしきい値を超える画素を抽出し、抽出した画素で囲まれる部分を開口部として検出するとともに、距離画像から開口部の近傍における侵入物体の存否を検出する信号処理回路10とを備える。
(もっと読む)
距離測定装置
【課題】
距離測定装置に於いて、簡単な受光光学系とし、而も遠距離測定、近距離測定のいずれでも高精度の測距を可能にする。
【解決手段】
測定対象物に測距光を投光し、該測定対象物からの反射測距光を受光して距離を測定する距離測定装置に於いて、測距光を発する光源部15と、該光源部からの測距光を投光する投光光学系16と、該投光光学系と一部を共用し、入射集光された測定対象物からの反射測距光を受光する受光光学系18とを具備し、該受光光学系は反射測距光が入射集光する中心部と、集光位置が中心部からずれるに応じて透過する光量を制限する孔明きマスク53とを有する。
(もっと読む)
レーザ測距装置
【課題】ポインティング検出機能を受光系のレベル検知機能に含め、かつ受光量を所定値に調整して受光検出を正確にさせた上、装置の小型化を可能とする。
【解決手段】受光検知器5が、測距する目標物から送られるレーザビームによる受光スポットを受けて受光レベル値を得る検知面を有する。この検知面を制御部8の制御を受ける受光検知器位置調整器9により受光スポットの光軸方向または光軸に垂直な面方向に適切に移動させて配置する。この結果、計測停止信号として検出する受光レベル値を所定値に設定できる。次いで、光軸に垂直な面で検知面を走査することにより、検知面の走査範囲で受光レベル量の変化が得られるので、受光レベル量の位置と相関とからポインティングを推定することができる。すなわち、検知面の変位とその受光量の変化とからポインティング検出と測距の正確性向上を図ることができるので、装置の小型化も実現できる。
(もっと読む)
3次元画像システムにおける範囲または距離またはレインジ(range)の決定
対象物の画像化のシステムと方法。
検出器アレイの画像が画像面に配設される。検出器の各アレイは内挿部を有しているタイミング回路に接続され内装器はそれが放電する時とは異なった速度で第1のキャパシタを充電する第1の回路を含む。光パルスは対処物の方に送られるので光パルスの一部分は反射パルスとして対象物から反射され光パルスがいつ対象物へ送られたかを示す第1の値が記録される。反射されたパルスは1またはそれ以上の検出器で検出されそのパルスのパルス特性とその反射パルスが検出器にいつ到達したかを表わす第2の値とが記録される。対象物との範囲はその後第1及び第2の値と反射されたパルス特性の関数として計算される。
(もっと読む)
光学式変位計
【課題】ユーザの判断や操作の負担をできるだけ軽減しながら、対象物の種類等に応じて適切な計測アルゴリズムを選択することによって高い計測精度を維持することが可能な光学式変位計を提供する。
【解決手段】光学式変位計は、ワークに光を照射するための発光素子と、複数の画素構成部のそれぞれがワークからの光を受光して受光量に応じた電気信号を出力するイメージセンサーと、イメージセンサーからの電気信号を処理して受光量の分布に相当する受光波形の山部を検出し、山部のピーク位置又は重心位置を算出することによって対象物までの距離又は対象物の変位を計測する計測処理を実行する処理ユニットを備えている。計測処理部は、ピーク位置又は重心位置の算出方法が異なる複数の計測モードを有し、受光波形の山部の幅のような特徴量を抽出し(#103)、その特徴量に応じて適切な計測モードを選択する(#104〜#108)。
(もっと読む)
光波測距装置
【課題】 安価なAD変換器を用いてAM方式光波測距装置を提供すること。
【解決手段】 光波測距装置は、主発振器11、第1PLL回路12、第2PLL回路13、レーザ駆動回路14およびLASER15からなる光源部10と、APD21および増幅器22からなる受光部20と、第1AD変換器31および第2AD変換器32からなるAD変換手段30と、位相差演算回路41からなる位相差検出手段40と、CPU51からなる距離検出手段50で構成されている。主発振器11から発振された基準電気信号が、互いに異なり、かつ択一的に選択される2種の周波数f1、f2を有し、サンプリング信号が、基準電気信号に対してn回に一度同期し、かつ、サンプリング信号の周波数fSが、基準電気信号の2種の周波数f1、f2に対して平均値を成し、AD変換手段が、サンプリング信号に基づいて、基準電気信号の一周期につき少なくとも一回のAD変換を行なう。
(もっと読む)
目標捕捉装置
多重反射のビーム成分を意図的に減衰させる。減衰フィルタ(18,19)を受信器(2)の前に及び送信器(1)の後にそれぞれ設ける。ビーム成分の強度の減衰は、ファクターで0.7、少なくとも0.5または0.3となる。別の方法または追加的に、ミラー(10)または立方体プリズム(14)の偏向手段を用いてビームを減衰させることができる。多重反射するビーム成分は、減衰手段を少なくとも2回通過する。従って、通常のビーム成分に比べて、一層減衰される。さらに受信器(2)の入力表面(5)は、円錐の偏向表面で囲まれている。この偏向表面は、そこに入射する光を吸収し、残部を入力方向以外の方向に反射して、多重反射を生じさせない。  (もっと読む)
(もっと読む)
移動制御システム
本発明は、車両またはロボットアームなど移動プラットフォームの制御に使用できる移動制御システムに関する。本発明は特に車両用の運転支援、車両用のセルフパーキング支援システムに利用できる。3次元カメラ(12)がプラットフォーム、例えば車(102)上に置かれ、プラットフォームまわりの環境を撮像する(114)ように配置される。プロセッサ(7)が3次元情報を用いて環境モデルを生成し、このモデルを利用して移動制御信号を生成する。好ましくは、プラットフォームは環境に対して移動し、様々な位置からの環境の複数の画像を取得する。  (もっと読む)
(もっと読む)
位置判定及びモーショントラッキング
プロセッサベースのシステム(301)において使用される位置判定及びモーショントラッキングのためのシステム及び方法。実施形態は、固定点(132)を中心として少なくとも1つの方向に動く方向転換器(130)と、サーチビーム(131)を位置ビーム(141)として反射する対象物(101)と、方向転換器の向きから少なくとも1つの角度位置を判定する論理回路(160)と、固定点(132)からの対象物の距離(104)を判定する論理回路(161)とを含む場合がある。  (もっと読む)
(もっと読む)
近接度検出器
光源(1)と、光源(1)により照明されるときに基準物から生じる後方散乱光を受光するための光検出器(3)とを備え、光検出器(3)への後方散乱される光の強度を近接度の尺度として利用することにより、第1の物体(目標物)と第2の物体(基準物)との間の近接度を検出するための装置に関する。目標物(2)は、焦点面(7)を有し光源(1)により照明される光学デバイス(4)を含む。光源(1)からの光線の軸と光検出器(3)への後方散乱による光線の軸とは互いに非常に接近し、ほぼ平行又は一致する部分を有する。近接度は目標物(2)と、ほぼ焦点面に位置する基準物(6,8)との間の間隔(相対位置)に相当する。  (もっと読む)
(もっと読む)
三次元及び色彩検出における電荷管理のための方法及び装置
本発明の様々な実施形態では、オンチップ測定情報を、順番にではなく、ランダムに出力することができ、三次元画像を必要とするオブジェクト追跡、及び他の情報のためのオンチップ信号処理を、すぐに遂行することができる。システム全体は小さく、強固で、かなり少ないオフチップの別個の構成要素を必要とし、かつ、検出信号特性の改善を示す。オンチップ回路は、そのようなTOFデータを使って、場面内の一つのオブジェクト、又は全てのオブジェクト上の全ての点の距離及び速度を、同時に、容易に測定することができる。同様に、オンチップ回路はまた、検出センサ内の各画素における検出画像の分光組成を特定することができる。有利なことに、その個々の画素が分光組成を特定することができるセンサを使用して、さらに、TOF情報を特定することもできる。  (もっと読む)
(もっと読む)
541 - 559 / 559
[ Back to top ]