
Fターム[2F112EA05]の内容
Fターム[2F112EA05]に分類される特許
161 - 180 / 266
距離測定装置
【課題】手ぶれに起因する測定値のばらつきを少なくすることができる距離測定装置を提供する。
【解決手段】同じ対象物に対して8回連続して角度センサ31で筐体の重力方向の傾き角度を測定した後、対象物までの直線距離を測距部50で測定する。8回連続して角度を測定したときの最大値と最小値との差Aを求め、差Aに応じて角度分解能を調整し、水平距離演算、高さ演算等を行う。
(もっと読む)
能動的オブジェクト検出システムにおけるクラッタ除去
本願明細書において教示される方法および装置によれば、能動的オブジェクト検出システムは、都合よくクラッタを除去すると共に、光パルス放射および対応物および飛行時間ベースの距離決定により信頼性の高いオブジェクト検出を実行する。制限されるものではないが、本願明細書で教示される方法および装置は、特にセーフティ・クリティカルなオブジェクト検出アプリケーション、例えば、所定のた監視半径または輪郭内の少なくとも指定されたサイズのオブジェクトを監視する能動的オブジェクト検出システム(例えばレーザスキャナ)、に有利である。  (もっと読む)
(もっと読む)
距離測定方法及び装置

【課題】 距離測定方法及び装置を提供する。
【解決手段】 光パルスが照射された時から照射された光パルスが受信されるまでのクロックパルスの数をカウントし、光パルスが受信された時から受信された光パルスとクロックパルスとが重畳するまでのクロックパルスの数をカウントして、カウントされたクロックパルスの数を利用して対象物体との距離を計算することによって、低い周波数を持つ光パルス及びクロックパルスを利用して対象物体との距離を高い精密度で測定できて、コスト及び消費電力を低減させることができる。
(もっと読む)
測距装置
【課題】 短い検出時間で正確且つ簡単に対象物までの距離を測定可能な測距装置を提供する。
【解決手段】 転送時において、外光の強度が高いほど、転送電圧の大きさを小さくすると、障壁高さが高くなり、より多くの電荷量のキャリアが、第1及び第2ポテンシャル井戸φCD1、φCD2内に残留する。単位期間は、外光の強度に依存しないで設定される。外光の強度が高いほど、多くのキャリアが残留し、最終的に読み出されるキャリアから除去される。外光が強ければ、単位期間当りの転送回数が増加し、第1及び第2ポテンシャル井戸φCD1、φCD2内に蓄積されるキャリアが飽和する前に、転送が行われる。外光が弱ければ、単位期間当りの転送回数が減少し、余分な転送を行わないことで、単位時間当たりの蓄積電荷量を増加させ、短い検出時間において検出精度を向上させることができる。
(もっと読む)
測距装置
【課題】 出力飽和を抑制しつつ、正確な測距が可能な測距装置を提供する。
【解決手段】 複数のキャパシタC1b,C2bは、それぞれ半導体領域FD1、FD2に振り分けられたキャリアをそれぞれ蓄積している。また、判定手段としての比較器COMP1,COMP2及び論理積回路ANDは、キャパシタC1b,C2bに蓄積されたキャリアの電荷量に対応する値(出力電圧VOUT1,VOUT2)が、全て閾値Vthを超えたかどうかを判定している。キャパシタC1b,C2bに蓄積されたキャリアの電荷量に対応する値(出力電圧VOUT1,VOUT2)が、全て閾値Vthを超えた旨を、判定手段が示す場合には、減算手段としてのスイッチSW1a,SW2a及び電荷引き抜き用キャパシタC1a,C2aは、それぞれのキャパシタC1b,C2bに蓄積されたキャリアの電荷量から、一定の電荷量を減じている。
(もっと読む)
固体撮像素子
【課題】 正確な距離画像の計測が可能な固体撮像素子及び距離画像測定装置を提供する。
【解決手段】 固体撮像素子1は、パルス光が入射する固体撮像素子であって、画素P(m,n)へのパルス光の入射光量に応じた電圧(節点Aの電圧)を出力するアンプBAと、アンプBAの後段に接続された第1キャパシタCS1と、アンプBAの後段に接続された第2キャパシタCL1と、第1キャパシタCS1にショートゲート期間の間、アンプBAの出力を入力するための第1スイッチSS1と、第2キャパシタCL1にロングゲート期間、アンプBAの出力を入力するための第2スイッチSL1とを備えている。
(もっと読む)
測距装置
【課題】 出力飽和を抑制しつつ、正確な測距が可能な測距装置を提供する。
【解決手段】 測距装置は、変調した光を対象物Hに照射し、対象物Hで反射された光の入射に応答して発生したキャリアを時分割で振り分け、振り分けられたキャリアの電荷量に基づいて、対象物Hまでの距離dを求める測距装置において、振り分けられたキャリアをそれぞれ蓄積する複数のキャパシタC1b,C2bと、キャパシタC1b,C2bに蓄積されたキャリアの電荷量に対応する出力電圧VOUT1,VOUT2のいずれかが、閾値Vthを超えたかどうかを判定する比較器COMP1,COMP2と、出力電圧VOUT1,VOUT2のいずれかが、閾値Vthを超えた旨を、比較器COMP1,COMP2が示す場合には、それぞれのキャパシタC1b,C2bの入力側端子P1,P3を、それぞれのキャパシタC1b,C2bの蓄積電荷量が減少するよう、一定電位VAに接続するスイッチQa,Qbを備えている。
(もっと読む)
測距センサ及び測距装置
【課題】 正確な測距を行うことが可能な測距センサ及び測距装置を提供する。
【解決手段】 光感応領域1G内でイオン化された不純物によるポテンシャルφPGと、第1及び第2半導体領域FD1、FD2内でイオン化された不純物によるポテンシャルφFD1,φFD2の差は、光感応領域と第1及び第2半導体領域で導電型が異なるので、これらの導電型が同一の場合よりも、大きくなる。このようにポテンシャルの差がある状態で、光感応領域1Gの導電型を半導体基板1A,1A’と同一のP型とし、その不純物濃度を低下させると、光感応領域1Gにおけるポテンシャルの横方向分布が、一方向のみに傾斜しやすくなる。光感応領域1G内で発生したキャリアが第1半導体領域FD1及び第2半導体領域FD2内に確実に流れ込みやすくなり、光感応領域1G内におけるキャリアの残留を抑制することができる。
(もっと読む)
距離計測方法および装置、ならびに距離計測装置を備えた車両
【課題】計測対象空間内の被検物の距離情報、例えばその被検物が計測装置からある特定の距離だけ離れているかどうかを高速に計測する。
【解決手段】投光器1L,1Rは、計測対象空間内に照射光L11〜L13およびL21〜L23を交差するように、かつそれらの交点からの反射光のパルス間隔が交点までの距離に対応する時間間隔となるようにパルス光を投光する。撮像素子2は、計測対象空間内の被検物からの反射光を検出してその被検物の像を複数回撮像する。同期検波部33Aは、複数枚の画像における各画素から出力される時系列画素信号の中から、計測対象である交点までの距離に対応するパルス間隔を持つ時系列画素信号を検出する。
(もっと読む)
距離計測方法および装置、ならびに距離計測装置を備えた車両
【課題】被検物の反射率および距離に影響されることなく、被検物までの距離情報を正確に計測する。
【解決手段】投光器1R,1Bから照射角に対する照度の変化率が一定の照射光LRと、照射角に応じて照度の変化率が異なる照射光LBとを照射し、被検物の像をカメラ2Cによって撮像し、撮像された画像のうち照射光LRによる画像から、照度の変化率が一定の領域を観察領域として抽出し、照射光LBによる画像から、その観察領域毎に、照度の変化率を求め、この変化率から照射光LBの照射角を求め、この照射角の情報を用いて被検物までの距離を算出する。
(もっと読む)
計測装置
【課題】前方物体までの距離を精度よく計測可能な装置を提供する。
【解決手段】本装置は、パルス光の反射波をセンサで受光して、前方物体までの距離を算出する。センサは、光電変換素子PDのカソードに、トランジスタTr11,Tr12,Tr20のソース電極が接続された構成にされ、トランジスタTr11,Tr12のドレイン電極に、電荷蓄積部FD1,FD2を備える。本装置は、トランジスタTr11,Tr12,Tr20をオンし、光の発射開始後、反射波が到達した頃に、電荷排出用のトランジスタTr20をオフして、素子PDから蓄積部FD1,FD2への電荷転送を開始する。また、発射終了時点でトランジスタTr11をオフし、所定時間遅れてトランジスタTr12をオフして、蓄積部FD1,FD2の電荷量の情報を取得する。更に、反射波の非入力期間に蓄積部FD2の電荷量の情報を取得し、これらの情報に基づき前方物体までの距離を算出する。
(もっと読む)
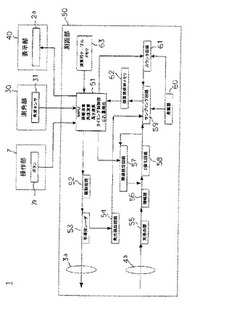
物理量センサおよび物理量計測方法
【課題】物体の高速検知と物体の物理量の高分解能計測を実現する。
【解決手段】物理量センサは、半導体レーザ1と、光電センサ10と、光電センサ10の出力を基に物体13を検知する物体検知装置11と、検知モードでは第1の周期の変調光をレーザ1から放射させ、物体13を検知した後の計測モードでは第1の周期より長い第2の周期の変調光をレーザ1から放射させる変調モード切替装置12と、フォトダイオード2の出力信号に含まれる、レーザ1から放射されたレーザ光と物体13からの戻り光との自己結合効果によって生じる干渉の情報から、物体の物理量を計測する計測手段(電流−電圧変換増幅器5、フィルタ回路6、計数装置7、演算装置8)とを有する。
(もっと読む)
パルス反射混合法を用いた手持ち式レーザ距離測定器
【課題】パルス反射混合法において測定時間をより的確に利用することにより、手持ち式レーザ距離測定器の感度ひいては測定範囲を向上させる。
【解決手段】制御手段2によって制御可能な少なくとも1つの遅延回路9a,9bが設けられており、該遅延回路9a,9bが、局所発振器8と、光検出器10および/または送光器12との間に配置されており、測定パルス4および基準パルス6を走査するために、走査パルス11と送信パルス7との間に遅延を発生させる。
(もっと読む)
反射型光電センサ
【課題】被検出物体の有無の検出以外に光電センサから被検出物体の反射率を判別することができる反射型光電センサを提供する。
【解決手段】図2(a)に示すように投光手段から被検出物体に照射する光Pfを第1〜第6のパルス光Pf1〜Pf6に分割し、各パルス光の投光量Eを相違させて、変化率ε1の光Pfを被検出物体に照射する。被検出物体から反射されたパルス光を受光手段により受光し、図2(b)に示すパルス光Pgの受光量Wの変化率ε2を判別する。被検出物体の反射率δが異なると、図2(b)又は図2(c)に示すようにパルス光Pgの受光量Wの変化率ε2も変化するので、この両者の相関データに基づいて、判定されたパルス光Pgの受光量Wの変化率ε2に応じた被検出物体の反射率δを選択して判別する。
(もっと読む)
裏面入射型測距センサ及び測距装置
【課題】 高精度の距離検出を行うことが可能な裏面入射型測距センサ及び測距装置を提供する。
【解決手段】 裏面入射型測距センサ1は、二次元状に配列した複数の画素P(m,n)からなる撮像領域1Bを有する半導体基板1Aを備えている。各画素P(m,n)からは、上述の距離情報を有する信号d’(m,n)として2つの電荷量(Q1,Q2)が出力される。各画素P(m,n)は微小測距センサとして対象物Hまでの距離に応じた信号d’(m,n)を出力するので、対象物Hからの反射光を、撮像領域1Bに結像すれば、対象物H上の各点までの距離情報の集合体としての対象物の距離画像を得ることができる。フォトゲート電極PG直下の領域は、電界集中領域1Gからなる。
(もっと読む)
裏面入射型測距センサ及び測距装置
【課題】 高精度の距離検出を行うことが可能な裏面入射型測距センサ及び測距装置を提供する。
【解決手段】 裏面入射型測距センサ1は、二次元状に配列した複数の画素P(m,n)からなる撮像領域1Bを有する半導体基板1Aを備えている。各画素P(m,n)からは、上述の距離情報を有する信号d’(m,n)として2つの電荷量(Q1,Q2)が出力される。各画素P(m,n)は微小測距センサとして対象物Hまでの距離に応じた信号d’(m,n)を出力するので、対象物Hからの反射光を、撮像領域1Bに結像すれば、対象物H上の各点までの距離情報の集合体としての対象物の距離画像を得ることができる。投光用の近赤外光の入射に応答して半導体深部で発生したキャリアを、光入射面とは逆側のキャリア発生位置近傍に設けられたポテンシャル井戸に引き込めば、高速で正確な測距が可能となる。
(もっと読む)
距離計測装置とそのキャリブレーション方法
【課題】計測対象物に隠れる位置に較正用マーカが設置される場合でも、距離センサの位置を正確にキャリブレーションする。
【解決手段】計測対象物3の計測に適し位置が既知の特定位置座標に位置決めされた3以上の較正用マーカC1〜C3と、計測対象物に遮断されて較正用マーカの位置を計測できない場合でも計測できる位置に固定された3以上の特徴物A1〜A3,B1〜B3と、離れた位置から計測できる距離センサ10と、計測された位置座標を補正する補正装置12とを備える。距離センサ10を任意の較正位置D1に固定して較正用マーカC1〜C3の特定位置座標を計測し、距離センサ10の較正位置D1の位置座標を算出する。また、特徴物B1〜B3を較正位置D1の距離センサで計測し、特徴物の修正位置座標を算出する。さらに、距離センサを任意の位置D2〜D4に固定して、計測対象物と特徴物を計測し、計測対象物3の修正位置座標を算出する。
(もっと読む)
裏面入射型測距センサ及び測距装置
【課題】 高精度の距離検出を行うことが可能な裏面入射型測距センサ及び測距装置を提供する。
【解決手段】 裏面入射型測距センサ1は、二次元状に配列した複数の画素P(m,n)からなる撮像領域1Bを有する半導体基板1Aを備えている。各画素P(m,n)からは、上述の距離情報を有する信号d’(m,n)として2つの電荷量(Q1,Q2)が出力される。各画素P(m,n)は微小測距センサとして対象物Hまでの距離に応じた信号d’(m,n)を出力するので、対象物Hからの反射光を、撮像領域1Bに結像すれば、対象物H上の各点までの距離情報の集合体としての対象物の距離画像を得ることができる。可視光励起キャリア再結合領域1Cにおいて不要キャリアが消滅し、フォトゲート電極PGの直下領域にまで至らないため好ましく、また、近赤外光は10μm以上100μm以下の深さの領域で吸収される。
(もっと読む)
ビーム照射装置およびレーザレーダ
【課題】レーザ光の走査領域を予め設定された矩形形状とすることができるビーム照射装置およびレーザレーダを提供する。
【解決手段】レーザ光源(半導体レーザ101)と、レーザ光源から出射されたレーザ光が入射されるミラー13と、ミラー13を第1の回動軸と当該第1の回動軸に垂直な第2の回動軸をもってそれぞれ第1および第2の方向に回動させる駆動機構(ミラーアクチュエータ100)と、駆動機構を制御してレーザ光を2次元方向に走査させる制御回路(DSP制御回路201、等)を備える。制御回路は、レーザ光の走査領域が矩形形状となるよう、ミラーを第1の方向および第2の方向に回動制御する。
(もっと読む)
光レーダ装置
【課題】測定対象物が移動体である場合であれ、該移動体への追従性の低下を抑えながら、分解能を向上させることができる光レーダ装置を提供すること。
【解決手段】光レーダ装置の制御回路は、レーザ光源から出射されるパルス光の照射周波数fを、一走査周期当たりの照射パルス数が自然数にならないように設定する。このため、連続する走査周期Tの間で各走査周期Tにおけるパルス光の出射タイミングに、パルス光の照射周期tよりも短い時間Δt(本実施の形態ではΔt=t・1/2)分のずれが生じる。したがって、先の走査における隣り合うパルス光の照射位置p0〜p6の間に、その走査に連続する次の走査におけるパルス光の照射位置p0’〜p6’が設定され、分解能が擬似的に向上する。
(もっと読む)
161 - 180 / 266
[ Back to top ]