
Fターム[2F112FA25]の内容
Fターム[2F112FA25]に分類される特許
1 - 20 / 30
光波距離測定方法及び光波距離装置
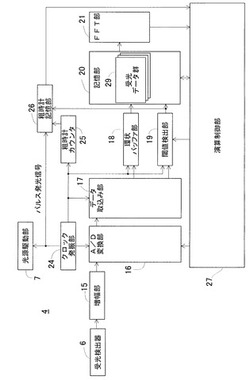
【課題】パルス光を利用した光波距離測定に於いて簡単で而も高精度の測距が行える光波距離測定方法及び光波距離装置を提供する。
【解決手段】測距光路と、内部参照光路と、パルス光を発するパルス発光光源と、パルス光を測距パルス光と内部参照パルス光とし、測距パルス光及び前記内部参照パルス光を受光して受光信号を発する受光検出器6と、該受光検出器からの受光信号に基づき測定対象物迄の距離を演算する計測部4とを具備し、該計測部は、内部参照パルス光と測定対象物で反射された測距パルス光との受光時間差に基づき粗測距を行い、前記受光検出器が出力する内部参照パルス光の受光波形、測距パルス光の受光波形をそれぞれフーリエ変換し、複数の周波数成分に分解し、得られた周波数成分毎に位相差を求め、位相差から得られる時間差に基づき精密測距を行い、粗測距と精密測距とを加算して測定対象物迄の距離を測定する。
(もっと読む)
距離測定装置

【課題】測定対象物までの距離に拘らず、光検出器のダイナミックレンジの範囲で、測定対象物までの距離を精度よく測定することができる距離測定装置を提供する。
【解決手段】距離測定装置は、測定対象物に対し測定光を投光する光投光部と、等速で回転移動して対象物で反射された反射光を複数方向に反射可能に構成された可動鏡と、可動鏡で反射された反射光を集光する集光素子と、集光素子の焦点面に配置された予め定めた面積の受光領域を備え、受光領域で受光された光を検出する光検出部と、測定範囲の上限距離に在る対象物からの反射光を受光した場合には受光領域への結合効率が最大となる位置に可動鏡を移動させ、測定範囲の下限距離に在る対象物からの反射光を受光した場合には受光領域への結合効率が小さくなる位置に可動鏡を移動させる駆動制御部と、計測時間から測定対象物までの距離を演算する演算部と、を備える。
(もっと読む)
固体撮像装置および携帯情報端末
【課題】複数のマイクロレンズを有していても、補正を容易に行うことが可能で、かつ距離推定や画像再構成における誤差および画質劣化を抑制することのできる固体撮像装置および携帯情報端末を提供する。
【解決手段】本実施形態の固体撮像装置は、被写体を結像面に結像する第1の光学系と、複数画素を含む複数の画素ブロックを有する撮像領域を備えた撮像素子と、前記複数の画素ブロックに対応して設けられた複数のマイクロレンズを有するマイクロレンズアレイを含み、前記結像面に結像される予定の像を、個々のマイクロレンズに対応する画素ブロックに縮小再結像する第2の光学系と、前記撮像素子によって得られた前記被写体の画像信号を用いて、前記各マイクロレンズと前記画素ブロックとの光学位置関係を補正した画像信号処理を行う信号処理部と、を備えている。
(もっと読む)
光測距装置
【課題】バイアス電圧を印加することにより増倍作用を持つ受光素子を備えた光測距装置において、素子温度の変化に対して個々の受光素子の増倍率を精度良く一定に保持できるようにする。
【解決手段】光測距装置1は、2次元走査ミラー2、レーザ投光部3、アバランシェフォトダイオードAPDからなる受光素子4bを備えたレーザ受光部4、投受光分離器5を含んで構成される。また、レーザ光走査領域SAの下端に沿って走査領域SAに重なるように、短冊状の反射板21をカバーガラス7に取り付けてある。そして、反射板21からの反射光を受光したときの受光素子4bの出力が目標値(所定の設定値)になるように、受光素子4bに印加するバイアス電圧を変更する。
(もっと読む)
光学式測距装置
【課題】簡単な構造にて、周囲温度の変化と自己発熱とによる測距精度の低下を防ぐことができる光学式測距装置を提供する。
【解決手段】測距対象物までの距離を測定しているときの温度センサ25によって検出された温度と、上記距離を測定していないときの温度センサ25によって検出された温度との変化量に基づいて検出値を補正した後に三角測距法により測距対象物までの距離を算出する受光素子12と、発光レンズ14及び受光レンズ15の間の距離を制御するレンズ間距離制御部18とを備えており、レンズ間距離制御部18は、測距装置10の周囲温度の変化によって生じる測距装置10の温度の変化に対する、発光レンズ14と受光レンズ15との間の距離の変動量と、測距装置10の自己発熱によって生じる測距装置10の温度の変化に対する当該距離の変動量とを近づけるように、当該距離を制御する。
(もっと読む)
ステレオカメラシステム及び該システムを備える車両
【課題】外部の物体を利用することなく、簡単な構成にて、画像データの位置補正処理を高精度にて行う、汎用性の高いステレオカメラシステム及び該システムを備える車両を提供する。
【解決手段】ステレオカメラシステム(100)は、第1カメラ(20a)、第2カメラ(20b)、及び、基台(30)からなるステレオカメラユニット(70)と、第1カメラ(20a)及び第2カメラ(20b)が出力する第1画像データ及び第2画像データの少なくとも一方に、位置補正処理を行う制御装置(40)とを備える。第1カメラ(20a)及び第2カメラ(20b)の視野に、ステレオカメラユニット(70)の一部がそれぞれ含まれ、制御装置(40)は、第1画像データ及び第2画像データに含まれるステレオカメラユニット(70)の一部の画像に対応するデータに基づいて位置補正処理を行う。
(もっと読む)
ステレオ画像処理装置、画像処理方法及びプログラム
【課題】 撮影画像の画質及び距離画像の精度を向上することのできるステレオ画像処理装置を提供する。
【解決手段】 マッチング回路18は、増幅回路16から出力される2つの映像信号に対して周知のマッチング処理を行い、画像のずれ量を示す信号を出力する。距離画像生成回路20は、マッチング回路18からの出力を受けて、撮影対象物までの距離を測定して距離画像を生成する。加算回路22は、増幅回路16から出力される映像信号の一方に対して、画像のずれ量に相当する分だけ画像をずらした後に、2つの映像信号を加算することで、低輝度域や中輝度域におけるノイズ成分を低減する。加算回路22からの出力信号に対し、非線形処理回路24による非線形処理が施され、監視用画像が出力される。また、増幅制御回路28では、増幅回路16から出力される映像信号のレベルが所定範囲内に入るように、増幅回路16での増幅率を制御する。
(もっと読む)
距離計測装置とその距離計測装置に用いられる受光装置
【課題】 対象物までの距離を正確に計測することができる距離測定装置、及びその距離測定装置で用いられる受光装置を提供する。
【解決手段】 距離計測装置10は、照射部4と受光装置50を備える。照射部4は、対象物30に向けて照射光20を照射する。受光装置50は、受光部60と演算部70を備える。受光部60は、対象物30で反射した反射光40を受光して電気信号に変換する。演算部70は、照射光20と反射光40に基づいて対象物30までの距離を演算する。演算部70は、計時器2と光量測定器12と距離データ計算器16を備える。計時器2は、照射された照射光20が対象物30で反射して受光部60に至るまでの時間を計測する。光量測定器12は、反射光40の光量を測定する。距離データ計算器16は、計時器2で計測された時間と光量測定器12で測定された光量を利用して、対象物30までの距離データを出力する。
(もっと読む)
距離測定装置及び距離測定方法
【課題】測定装置内部の遅延回路の変動を相殺し、高精度でかつ高速測定が可能な距離測定装置及び方法を実現する。
【解決手段】パルス的に発光する光源部10から、第1基準光r1、第2基準光r2、測定送信光mtを分岐し、光学的変化が略生じない第1参照光路R1を伝播させた第1基準光r1、光学的遅延発生部50が挿入された第2参照光路を伝播した第2基準光r2、測定送信光を測定対象物160に照射して反射して戻ってきた測定受信光mr間の検出時間差を測定することによって測定対象物160との距離を測定する装置及び方法であって、測定受信光mrと第1基準光r1が時間的に分離している場合は、両者の検出時間差から距離を算出し、測定受信光mrと第1基準光r1が時間的に分離していない場合は、第1基準光r1と第2基準光r2の検出時間差Tdと、測定受信光mrと第2基準光r2の検出時間差Td’から距離Lを算出する。
(もっと読む)
撮像装置
【課題】温度変化に起因する基線長の変化を高精度に補正し、車載用途の測距カメラモジュールとして十分な信頼性を有する撮像装置を提供する。
【解決手段】本発明の撮像装置は、複数の光学レンズ4、5を同一平面上に配置したレンズユニット6と、前記複数の光学レンズに1対1に対応する複数の撮像領域を有する撮像素子12と、前記レンズユニット6に接して配置され、前記レンズユニット6の温度を検出する温度検出素子7と、を有し、前記温度検出手段の検出した温度に基づいて、前記複数の光学レンズ4、5の光軸間の距離を補正し、補正後の前記複数の光学レンズの光軸間の距離に基づいて、被写体までの距離を算出する撮像装置である。
(もっと読む)
画像処理装置および方法並びにプログラム
【課題】少ない演算量により、相関ウィンドウのサイズを適切に設定できるようにする。
【解決手段】互いに異なる位置において被写体を撮影することにより取得した基準画像G1と参照画像G2とを取得し、被写体検出部30が、基準画像G1から所定被写体を検出する。基準画像G1と参照画像G2との間において、互いに対応する対応点を探索する際に使用される相関ウィンドウのサイズを設定するウィンドウサイズ設定部33が、基準画像G1における所定被写体を含む所定被写体領域内の画素と対応する対応点を探索するための相関ウィンドウWのサイズを、所定被写体領域のサイズに応じて設定する。
(もっと読む)
ビーム照射装置
【課題】目標領域内におけるスキャン動作を精度よく行い得るビーム照射装置を提供する。
【解決手段】制御処理部202は、ミラーアアクチュエータ100を第1基準位置と第2基準位置の近傍域で2次元的に駆動させ、これら基準位置を検出した時のPSD106の出力値(座標データ)を記憶する。温度変化や経年変化等の影響でPSDの状態が初期状態から変化すると、図8(b)に示す如く、記憶された座標データ(第1基準点R1´、第2基準点R2´)は、初期状態において設定した座標データ(第1基準点R1、第2基準点R2)からずれるようになる。制御処理部202は、これら2つの基準点におけるズレ量ΔP1、ΔP2とズレ量ΔQ1、ΔQ2に基づいて目標値テーブル202aのデータ校正を行い、校正した目標値テーブルを用いてサーボ動作を行う。
(もっと読む)
測距装置
【課題】 出力飽和を抑制しつつ、正確な測距が可能な測距装置を提供する。
【解決手段】 複数のキャパシタC1b,C2bは、それぞれ半導体領域FD1、FD2に振り分けられたキャリアをそれぞれ蓄積している。また、判定手段としての比較器COMP1,COMP2及び論理積回路ANDは、キャパシタC1b,C2bに蓄積されたキャリアの電荷量に対応する値(出力電圧VOUT1,VOUT2)が、全て閾値Vthを超えたかどうかを判定している。キャパシタC1b,C2bに蓄積されたキャリアの電荷量に対応する値(出力電圧VOUT1,VOUT2)が、全て閾値Vthを超えた旨を、判定手段が示す場合には、減算手段としてのスイッチSW1a,SW2a及び電荷引き抜き用キャパシタC1a,C2aは、それぞれのキャパシタC1b,C2bに蓄積されたキャリアの電荷量から、一定の電荷量を減じている。
(もっと読む)
測距装置
【課題】 出力飽和を抑制しつつ、正確な測距が可能な測距装置を提供する。
【解決手段】 測距装置は、変調した光を対象物Hに照射し、対象物Hで反射された光の入射に応答して発生したキャリアを時分割で振り分け、振り分けられたキャリアの電荷量に基づいて、対象物Hまでの距離dを求める測距装置において、振り分けられたキャリアをそれぞれ蓄積する複数のキャパシタC1b,C2bと、キャパシタC1b,C2bに蓄積されたキャリアの電荷量に対応する出力電圧VOUT1,VOUT2のいずれかが、閾値Vthを超えたかどうかを判定する比較器COMP1,COMP2と、出力電圧VOUT1,VOUT2のいずれかが、閾値Vthを超えた旨を、比較器COMP1,COMP2が示す場合には、それぞれのキャパシタC1b,C2bの入力側端子P1,P3を、それぞれのキャパシタC1b,C2bの蓄積電荷量が減少するよう、一定電位VAに接続するスイッチQa,Qbを備えている。
(もっと読む)
測距センサ及び測距装置
【課題】 正確な測距を行うことが可能な測距センサ及び測距装置を提供する。
【解決手段】 光感応領域1G内でイオン化された不純物によるポテンシャルφPGと、第1及び第2半導体領域FD1、FD2内でイオン化された不純物によるポテンシャルφFD1,φFD2の差は、光感応領域と第1及び第2半導体領域で導電型が異なるので、これらの導電型が同一の場合よりも、大きくなる。このようにポテンシャルの差がある状態で、光感応領域1Gの導電型を半導体基板1A,1A’と同一のP型とし、その不純物濃度を低下させると、光感応領域1Gにおけるポテンシャルの横方向分布が、一方向のみに傾斜しやすくなる。光感応領域1G内で発生したキャリアが第1半導体領域FD1及び第2半導体領域FD2内に確実に流れ込みやすくなり、光感応領域1G内におけるキャリアの残留を抑制することができる。
(もっと読む)
携帯型測距装置
【課題】 測定対象物までの距離とともに被測定面の傾斜を広範囲に亘って判定すること。
【解決手段】 対物レンズ18を介して測定対象物に向けて測距光を出射し、その反射光を対物レンズ20を介して受光素子22で受光し、測距光と反射光間の位相差を基に測定対象物までの距離を演算部24で演算し、筐体38にも受けた基準面42の当接する被測定面の傾斜を0〜360°の範囲で傾斜計14で測定し、この測定値を演算部24に出力する。
(もっと読む)
光学式変位計、光学式変位測定方法、光学式変位測定プログラム及びコンピュータで読み取り可能な記録媒体並びに記録した機器
【課題】センサヘッド部の設置に際して、ワークに対して正確な位置調整を可能とする。
【解決手段】測定対象物からの反射光を受光して、第1の方向の各位置における受光信号として出力するための2次元受光素子と、2次元受光素子からの受光信号を増幅するための増幅器と、投光部からの照射光の反射光により、第1の方向の各点において増幅器で得られた増幅信号に基づき、測定対象物のプロファイル形状を演算可能なプロファイル演算手段と、プロファイル演算手段で演算された測定対象物のプロファイル形状を表示可能な表示部と、プロファイル形状を表示部で表示された状態で、所望の計測領域を指定するための計測領域指定手段と、領域指定手段で指定された計測領域に対して所望の演算を行うことが可能な計測処理部とを備える。
(もっと読む)
画像処理装置
【課題】2つの撮像装置から得られた撮像画像に適切な前処理を施すことによって、各撮像画像に含まれるノイズの影響や2つの撮像画像間の画素値のばらつきの影響を適切に補償し、視差を精度良く検出することを可能とする画像処理装置を提供する。
【解決手段】所定の方向に並設した2つの撮像装置の撮像画像のいずれか一方の撮像画像に対して、前記所定の方向に画素数dの間隔を存する画素の画素値I(p),画素値I(p+d)の差の値の確率的分布を正規分布で近似し得るdの値の最大値dmaxを撮像画像のサンプリングデータを基に決定する。その最大値dmaxを使用し、各撮像画像の各画素に対して、該画素値からdmaxの間隔を存する画素の画素値I(p+dmax),I(p-dmax)の差の値を当該画素の画素値とする前処理を施す。前処理後の画像データを用いて視差を検出する。
(もっと読む)
投光器
【課題】投光角度が高精度に制御された投光器を提供することである。
【解決手段】レーザダイオード21から出射した光線の投射方向が、レンズ25の光軸方向に対して2次元的に移動させるアクチュエータ27により変更される。レンズ25の位置はPSD31a、31bで検出される。上記光線の投射方向の目標値はシステム制御部11より指示され、上記目標値とPSD31a、31bが検出したレンズ25の位置を基に、上記光線の投射方向が上記目標値に近づくようにアクチュエータ27が制御される。そして、レーザダイオード21から投射される上記光線の投射方向と目標値の誤差が、フィードバックループにより補正される。
(もっと読む)
移動時間原理による光電式非接触距離測定の方法および装置
本発明は、伝搬時間原理に従って非接触様式で距離を光電式に測定する方法において、センサユニットからの物体の距離が、開始信号と、物体によって反射された光測定パルスから得られるエコー信号との時間差から求められる方法に関する。時間差を求めるために、次の、a)開始信号およびエコー信号をデジタルクロックと比較することにより、デジタル未処理値が得られるステップと、b)開始信号とデジタル未処理信号の始まりとの初期時間差、およびエコー信号とデジタル未処理信号の終わりとの最終時間差が、少なくとも2つの細密補間回路を用いて求められるステップと、c)アナログ信号に対応する初期差または最終時間差が、細密補間回路に導入されて、デジタル初期時間差またはデジタル最終時間差に変換されるステップとが実施される。前記方法は、細密補間回路を自動的に較正するために、ステップa)〜c)に従って複数回の測定が実施され、また特定の値間隔内で初期時間差および最終時間差について値が測定される可能性に対して均一な分布であると考えることによって、細密補間回路の特性線の非直線性および/またはドリフトの補正が計算されることを特徴とする。本発明は、伝搬時間原理に従って非接触様式で距離を光電式に測定するための装置にも関する。  (もっと読む)
(もっと読む)
1 - 20 / 30
[ Back to top ]