
Fターム[2F129GG17]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援機器 (2,561) | 撮像機器 (2,058)
Fターム[2F129GG17]に分類される特許
341 - 360 / 2,058
車両走行案内システム
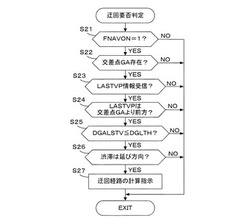
【課題】 走行中の車両への的確な情報提供が行われるとともに、走行中の車両において迂回経路の算出を適切に実行することができる車両走行案内システムを提供する。
【解決手段】 基地局1では、複数の車両2から送信される車両走行情報に基づいて、所定の道路RJM上に存在する渋滞の最後尾車両位置LASTVPが推定され、その最後尾車両位置LASTVPを示す情報が走行中の車両2に送信される。システムを構成する車両2により、自車両の走行状況を示す車両走行情報が基地局1に送信されるとともに、ナビゲーション装置22による経路誘導中において、所定の道路RJMが誘導経路中に含まれるときは、基地局1から送信される最後尾車両位置LASTVPを示す情報を用いて、迂回経路の算出の要否が判定され、迂回経路の算出が必要と判定されたときは、ナビゲーション装置22に迂回経路の算出が指示される。
(もっと読む)
画像処理システム及び位置測位システム

【課題】位置決めのための風景画像認識技術に利用される効果的な参照データの生成に適した画像処理システムとそのような参照データを用いた位置測位システムを提供する。
【解決手段】風景を撮影した撮影画像から画像特徴点を抽出する特徴点抽出部と、撮影画像に特定被写体が含まれている可能性を表す撮影状況情報に基づいて画像特徴点の重要度を決定し、この重要度に基づいて画像特徴点から撮影画像に対応する画像特徴点データを生成し、画像特徴点データを当該画像特徴点データに対応する撮影画像の撮影位置を含む撮影属性情報と関係付けて、参照データとして生成する画像処理システム。
(もっと読む)
イメージ拡張型の慣性航行システム(IAINS)及び方法
【課題】輸送手段用のイメージ拡張型(image−augmented)の慣性航行システム及び方法を提供する。
【解決手段】輸送手段10上に搭載されたイメージ拡張型の慣性航行システムは、航行状態ベクトルを推定するように構成された慣性航行システムと、イメージャーの視野(x,y,z)を通過する地形特徴に関連するピクセル信号を出力するように構成されたイメージャー12とを含む。処理装置は、特徴ピクセル信号に関連する所与の画像フレームに対して、イメージャーからイメージャーの視野を通過する1つまたは複数の地形特徴の中心までの距離を感知し、地形特徴がイメージャーの視野を通過するにつれて、各地形特徴を追跡する。処理装置はさらに、追跡された地形特徴に関する慣性航行システムの計算されたNED(前、右、下)座標位置情報に基づき、慣性航行システムの航行状態ベクトルを更新する。
(もっと読む)
交通手段の眺望予想表示システムおよびこれに用いられる表示手段
【課題】 従来、車両に備えられた風景動画表示ナビゲーション装置により表示される画像は、これから車両が通行する予定の位置の画像を見ることはできない。
【解決手段】 第1の列車1から眺められる画像がGPS受信器2によって検出されたその運行位置と共にカメラ3により取得され、第1の列車1と同一経路を第1の列車1より遅れて進行する第2の列車21に設けられたモニタ27へサーバ11によって伝達される。モニタ27には、カメラ3によって撮影された画像がその運行位置と関連付けて表示される。このため、第2の列車21に備えられたモニタ27には、第2の列車21が通行する予定の位置から眺められる画像が表示される。また、この画像は、先行する第1の列車1から眺められる最新の画像であるため、従来のように古い画像が表示されて実際に眺められる画像と異なってしまうこともなくなる。
(もっと読む)
運転支援装置
【課題】車両の運転操作を行う過程で積み重ねられるドライバの心理に即した運転支援を実現することのできる運転支援装置を提供する。
【解決手段】車両の運転域における各交通情報下での操作態様を検出しつつ、それら検出された操作態様に関する情報を交通情報毎に関連付けして学習する。そして、前回の減速地点で行われた減速操作と次の減速地点に関連付けして学習されている情報とに基づいて次に実行すべき運転支援態様を決定する。
(もっと読む)
運転支援装置および運転支援システム
【課題】方向指示器の操作を行い忘れているドライバーの車両の周囲の車両に、より確実に右左折や進路変更を知らせることを可能にする。
【解決手段】車両Bのナビゲーション装置1は、車両Bにおけるウインカー操作忘れを検知した場合に、ウインカー操作忘れが発生していることを示す情報を少なくとも含む通知情報を車両B外に送信する。そして、車両Aのナビゲーション装置1は、車両Bから受信した通知情報をもとに、ウインカー操作忘れが発生している車両が存在していることを少なくとも示す提示を表示装置19や音声出力装置20に行わせる。
(もっと読む)
追従対象車特定装置
【課題】 追従対象車両と他の車両が近接している場合であっても、追従対象車両を精度よく特定することを可能とした追従対象車特定装置を提供する。
【解決手段】 車々間通信機30で取得した周辺車両情報と、レーダ装置41で取得した前方車両の車両情報とを追従走行ECU10が比較することで、追従対象車両を特定する追従対象車特定装置であって、車々間通信機30で取得した他車両の速度とレーダ装置41で取得した前方車両の速度とを自車両進行方向の速度成分で比較することにより、追従対象車を特定する。
(もっと読む)
車両用入力システム
【課題】 複数の操作領域の中から選択・決定の操作により下位階層画面へと遷移させた場合に、その操作が操作者の意図と同じであるか否かを後から確認できるような車両用入力システムを提供する。
【解決手段】 上位階層画面302内において表示される1以上の入力画像3Cが、下位階層画面303〜306に切り替えるための画面切替領域3aであり、それら入力画像3Cが独自の色を有する画像(第一の対応画像3X)とされる。上位階層画面302の表示中に、複合操作部2によりそれら入力画像3Cのうちの1つが選択されて決定入力された場合には、その画面表示を、当該入力画像3Cに対応する下位階層画面303〜306に切り替えるとともに、当該下位階層画面303〜306内において、決定入力された該入力画像3Cと同じ色の背景画像3B(第二の対応画像3Y)を表示させることを特徴とする。
(もっと読む)
自車位置認識システム
【課題】衛星測位と推測航法とに基づいて車両の推定自車位置を算定する際に、その推定自車位置の誤差範囲をできるだけ正確に算定できる技術の提供。
【解決手段】衛星測位と推測航法とに基づいて車両の推定自車位置を算定する自車位置算定部と、推定自車位置を基準として推定自車位置の存在可能範囲を基本誤差範囲として算定する誤差範囲算定部とを備えた自車位置認識システム。車両走行方向を基準方向として当該基準方向に対する誤差の発生方向に偏りを有する方向性誤差要因の1つ又は2つ以上について、誤差の発生量の推定値である推定誤差量を算出する推定誤差量演算部と、方向性誤差要因毎の誤差の発生方向及び推定誤差量に基づいて、前記基本誤差範囲を修正する誤差範囲修正部とを備えている。
(もっと読む)
画像処理システム
【課題】風景画像認識技術に利用される効果的な参照用画像データの作成が重要となるので、そのような効果的な参照用画像データの作成に適した画像処理システム。
【解決手段】車両からの風景を撮影した撮影画像から当該撮影画像中における識別可能な事物を特徴オブジェクトとして認識し、この特徴オブジェクトを規定する1つまたは2つ以上の代表画像特徴点を抽出し、撮像画像内における代表画像特徴点の位置を表す特徴点位置情報と特徴オブジェクトの属性であるオブジェクト属性を表す属性情報とを含む特徴点データが生成される。さらに、この特徴点データに撮影位置を関連付けて、風景画像マッチングの参照データが生成される。
(もっと読む)
風景画像認識を用いた自車位置検出システム
【課題】風景画像認識技術を用いながらも、効率的な自車位置検出が可能な自車位置検出システムを提供する。
【解決手段】車両からの風景を撮影した撮影画像から画像特徴点を抽出することによって生成された画像特徴点データに対応撮影画像の撮影位置と車両イベントを関係付けた参照データ群を格納している参照データデータベース92と、車両の推定自車位置から算定される誤差範囲と実車両イベントとに基づいて、実撮影画像から抽出された画像特徴点からなるマッチング用データに対するマッチング相手候補となる参照データを出力する参照データ出力部と、マッチングした参照データに関係付けられた撮影位置に基づいて自車位置を決定する自車位置決定部が備えられている。
(もっと読む)
画像処理システム及び位置測位システム
【課題】位置決めのための風景画像認識技術に利用される効果的な参照用画像データの作成に適した画像処理システムを提供する。
【解決手段】車両からの風景を撮影した撮影画像から画像特徴点を抽出する特徴点抽出部と、画像特徴点に割り当てられた重み係数に基づいて画像特徴点から撮影画像毎の画像特徴点データを生成する画像特徴点データ生成部と、撮影画像中における画像特徴点データの分布状態に応じて画像特徴点に与えられる重み係数を調整する調整係数を設定する調整係数設定部と、画像特徴点データを画像特徴点データに対応する撮影画像の撮影位置を含む撮影属性情報と関係付けて、風景画像認識のために利用される参照データとしてデータベース化する参照データデータベース化部とを備えた画像処理システム。
(もっと読む)
基準パターン情報生成装置、方法、プログラムおよび一般車両位置特定装置
【課題】環境に応じて表示内容が変動する表示媒体を基準にして車両の位置を特定する技術の提供。
【解決手段】環境に応じて表示内容が変動する表示媒体を含む基準車両の周囲の風景を撮影した撮影画像から基準となる基準画像特徴点を抽出し、前記基準車両の周囲の風景を撮影した時点での前記基準車両の位置を基準位置として取得し、前記基準車両の風景を撮影した時点での前記基準車両の周囲の環境を基準車両環境として取得し、前記基準画像特徴点の前記撮影画像上での位置を示す基準パターン情報に対して、前記基準位置を示す情報と、前記基準車両環境を示す情報とを対応付けて所定の記録媒体に記録する。
(もっと読む)
駐車位置案内装置、方法およびプログラム
【課題】車両の走行挙動に対応した走行支援機能を車載端末に実行させる技術の提供。
【解決手段】駐車位置案内装置であって、駐車位置ごとに、当該駐車位置にて車両が非接触式充電を実際に行った際の充電効率を示す充電効率情報を取得する充電効率情報取得手段と、前記充電効率情報に基づいて前記駐車位置を前記充電効率とともに案内する案内手段と、を備える。
(もっと読む)
車両用充電支援装置、車両用充電支援方法、コンピュータプログラム
【課題】駐車動作完了前に、障害物を考慮した理想位置での充電に関する情報を通知可能な車両用充電支援装置、車両用充電支援方法及びコンピュータプログラムを提供する。
【解決手段】給電ユニット70が埋設された駐車枠75への駐車を開始すると、駐車枠75周辺の障害物80の位置及び形状の検出(S1)と、駐車枠75の位置及び形状の検出(S2)と、駐車枠75内の給電ユニット70の位置の検出(S3)を行う。給電ユニット70の位置に基づいて、バッテリ60の充電効率が最も高い駐車位置を最適位置に特定し(S4)、最適位置における自車両65と障害物80の距離を判定する(S5)。判定結果に応じて理想位置を特定し、当該理想位置におけるバッテリ60の充電効率及び理想位置を通知する(S10)。
(もっと読む)
経路探索装置および経路案内システム
【課題】より円滑に走行できる案内経路をより精度良く提示することを可能にする。
【解決手段】道路状況情報および走行状況情報をもとに、道路区間に路上占拠物が存在するか否か、路上駐車車両が存在するか否かを判断し、路上占拠物が存在すると判断した場合に、その道路区間に対応するリンクコストを、路上障害物が存在しない場合のリンクコストよりも高く決定する一方、路上駐車車両が存在すると判断した場合には、走行状況情報に基づいて、その道路区間が円滑に走行できる道路区間であるか否かを判断し、円滑に走行できる道路区間であると判断した場合には、その道路区間に対応するリンクコストを、路上障害物が存在しない場合のコストよりも高く決定せず、円滑に走行できる道路区間でないと判断した場合には、その道路区間に対応するリンクコストを、路上障害物が存在しない場合のリンクコストよりも高く決定する。
(もっと読む)
画像処理システム及び車両制御システム
【課題】高速道路だけでなく一般道を含め様々な車両走行路の走行中においても画像認識を用いて正確な自車位置検出が可能となる技術の構築。
【解決手段】車両からの風景を撮影した撮影画像に基づいて風景画像の認識を行う際に利用される参照データを作成する画像処理システム。所定形状の道路区間において撮影した撮影画像及び当該撮影画像の撮影位置を入力するデータ入力部と、前記道路区間内の任意の地点を特定地点として、前記道路区間を通過するための前記特定地点での目標運動量を規定する目標運動量設定部と、前記特定地点での前記撮影画像から生成された被マッチングデータを、特定地点の位置及び特定地点における目標運動量と関係付けて、前記参照データとしてデータベース化する参照データデータベース化部とを備えている。
(もっと読む)
風景画像認識を用いた自車位置検出システム
【課題】風景画像認識技術を用いながらも、効率的な自車位置検出が可能な自車位置検出システムを提供する。
【解決手段】車両からの風景を撮影した撮影画像から画像特徴点を抽出することによって生成された画像特徴点データに対応撮影画像の撮影位置を関係付けた参照データ群を格納している参照データベースベース92と、道路形状情報から推定自車位置における道路形状を判断し、当該道路形状と類似する道路形状が続く類似道路形状範囲を算定する道路形状評価部と、実撮影画像から抽出された画像特徴点からなるマッチング用データのマッチング相手としての参照データを参照データベースベース92から抽出する際に類似道路形状範囲を用いて参照データを決定する抽出参照データ決定部と、マッチングした参照データに関係付けられた撮影位置に基づいて自車位置を決定する自車位置決定部が備えられている。
(もっと読む)
風景マッチング用参照データ生成システム及び位置測位システム
【課題】多数のプローブカーから収集された撮影画像に基づき、風景画像マッチング用の効果的な参照用画像データを生成する。
【解決手段】推定自車位置を算定する機能を有する複数のプローブカーによって順次取得されたプローブデータから取り出された所定撮影位置領域の撮影画像の撮影位置の精度信頼度を評価して、この精度信頼度を撮影画像に付与し、所定度以上の精度信頼度を有する複数の撮影画像を処理対象撮影画像として選別し、各々の処理対象撮影画像の画像特徴点を抽出し、それらを統計処理して画像特徴点データを生成する。この画像特徴点データにこの画像特徴点データの元になった処理対象撮影画像の撮影位置を関係付けて、風景マッチングに利用される参照データが生成される
(もっと読む)
電子機器及びナビゲーション方法
【課題】 撮影したい訪問場所を巡る複数のコース(撮影コース)が予め分かっている場合には、その訪問場所とISPの通信エリアを考慮した、撮影に適した撮影コースを求める電子機器及びナビゲーション方法を提供する。
【解決手段】 所定の通信手段による通信が可能な範囲を示す通信エリア情報を取得し、順路内の前後の地点を結ぶそれぞれの経路が、通信エリア情報が示す通信エリアの範囲内に含まれるか否かに基づいて通信が可能となる順路毎の期待度を求め、この期待度に基づき複数の順路を順位付けして表示する。
(もっと読む)
341 - 360 / 2,058
[ Back to top ]