
Fターム[2F129GG17]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援機器 (2,561) | 撮像機器 (2,058)
Fターム[2F129GG17]に分類される特許
2,041 - 2,058 / 2,058
車両の制御装置

【課題】 走行経路情報の検出精度に対応して車両の挙動をきめ細かく制御することの可能な車両の制御装置を提供する。
【解決手段】 車両の走行経路情報を検出する場合に、各種のセンサの信号から検出される前記車両の走行軌跡と、情報記録媒体に記憶されているデータとを比較して、車両の現在位置を補正するマップマッチングを実行する走行経路情報検出装置と、走行経路情報に対応して設定された制御パターンに基づいて車両の挙動を制御する挙動制御装置とを備えた車両の制御装置において、マップマッチングの実行による車両の現在位置の補正が完了しているか否かを判断することにより、走行経路情報検出装置により検出される走行経路情報の検出精度を検出する精度検出手段(ステップS11,S12,S13)と、走行経路情報の精度に基づいて制御パターンを変更する制御パターン変更手段とを備えている。
(もっと読む)
車載ナビゲーション装置

【課題】案内経路に関する案内情報の効果が薄くなることを防止し、運転者への経路案内の確実性を向上させること。
【解決手段】スピーカ等からなる音声出力部60が設けられている。案内対象から現在位置の方向への所定距離手前の案内地点に車両が到達した場合に、音声出力部60を介して、案内対象に関する音声案内メッセージが出力される。そして、この案内地点から他の案内地点及び案内対象の地点のいずれか一方に車両が達するまで、再報知条件が成立する場合には、運転者が音声案内メッセージの内容を忘れないように、音声出力部60が案内対象に関する音声案内メッセージが再出力される。この結果、運転者に対して音声案内メッセージの内容を強く意識させることができる。これにより、案内経路に関する案内情報(音声案内メッセージ)の効果が薄くなることを防止し、運転者への経路案内の確実性を向上させることができる。
(もっと読む)
画像取得システム
【課題】 所望位置の状況を現在時点の実写画像として取得することができる画像取得システムを提供する。
【解決手段】 車両の現在位置を移動電話機19から情報センター21に送信する。情報センター22は各車両の現在位置をIPアドレスと共にデータベース24に蓄積する。車両の移動電話機19から画像取得希望位置を情報センター22に送信すると、情報センター22は画像取得希望位置近くにいる車両をデータベースから検索して該当車両のIPアドレスを画像取得希望の車両に送信する。画像取得希望の車両から画像希望位置近くの車両のIPアドレスに画像送信を希望する旨の要請を送信すると、その車両に搭載された撮影カメラ1で撮影した画像が移動電話機19から要請元の車両に送信される。
(もっと読む)
ナビゲーションシステムに使用するための地理的データベースの情報を収集する方法
【課題】 映像を収集して、その映像を使用してナビゲーション特徴を与えるための方法及びシステムを提供する。
【解決手段】 ナビゲーションシステムに使用するための地理的データベースのデータを収集する方法が開示される。地理的エリアの映像が得られる。この映像に見られる複数の地理的特徴が識別される。この識別された地理的特徴の各々に対し、映像における地理的特徴に対応する映像上の場所が識別される。識別された地理的特徴の各々を映像上の識別された場所に関連付けるデータが地理的データベースに記憶される。
(もっと読む)
車載用ナビゲーション装置とこれに用いる車線位置推定装置
【課題】 走行中の車線位置を正確に推定することができる車載用ナビゲーション装置を提供することを目的とする。
【解決手段】 GPS部7、地図情報記憶部2とを備える車載用ナビゲーション装置50において、CPU1は現在位置算出部21、カメラ11のカメラ画像から白線を検知する白線検知部22、走行車線位置推定部23、案内タイミング制御部24を有している。CPUにはウインカスイッチ12の操作信号が入力される。走行車線位置推定部は、自車両の走行道路を検出すると、ウインカ操作信号と白線検知部から信号により車線変更を判定し、自車両が走行中の車線位置を特定する。案内タイミング制御部は、前方の分岐を検出し、特定された車線にもとづき、所定の距離手前位置で、運転者に対して分岐案内を行うように制御する。
(もっと読む)
ナビゲーション装置
ガイドのためにガイドオブジェクトが交通路に対して、該ガイドオブジェクトが車両によって行われるべき運転操縦を実施するように表示される、交通路網において車両をガイドするためのナビゲーション装置が提案される。運転者は運転者に示される運転操縦を繰り返し、こうしてその前に計算された走行ルートに従う。 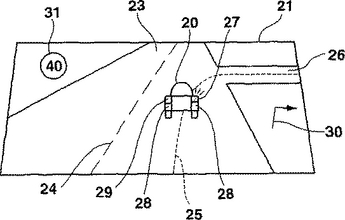 (もっと読む)
(もっと読む)
移動体用表示システム及び移動体
本発明の移動体用表示システムは、同時に表示可能な第1速度表示領域と第2速度表示領域等の複数の表示速度領域を備え、上記複数の速度表示領域のうち所定の速度表示領域に速度を表示させるとともに、残りの表示領域に速度以外の情報を必要に応じて表示させる表示制御部を有している。これにより、速度の誤認を低減させることができるので、安全運転を行う上で重要な情報である速度の誤認を無くし、使用者による運転の安全性を向上させる移動体用表示システムを提供できる。 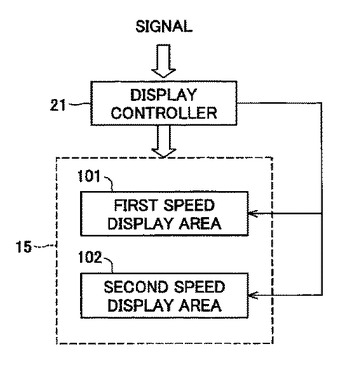 (もっと読む)
(もっと読む)
イメージ拡張型の慣性航行システム(IAINS)および方法
輸送手段(10)上に搭載されたイメージ拡張型の慣性航行システム(LAWS)は、航行状態ベクトルを推定するように構成された慣性航行システム(INS)と、イメージャーの視野(x,y,z)を通過する地形特徴に関連するピクセル信号を出力するように構成されたイメージャー(12)とを含む。システム(IAINS)は、慣性航行システム(INS)とイメージャー(12)とに動作可能に接続された処理装置をさらに含む。処理装置は、特徴ピクセル信号に関連する所与の画像フレームに対して、イメージャーからイメージャーの視野を通過する1つまたは複数の地形特徴の中心までの距離を感知するように構成される。処理装置はまた、地形特徴がイメージャーの視野を通過するにつれて、各地形特徴を追跡するようにも構成される。処理装置はさらに、追跡された地形特徴に関する慣性航行システム(INS)の計算されたNED(前、右、下)座標位置情報に基づき、慣性航行システム(INS)の航行状態ベクトルを更新するように構成される。 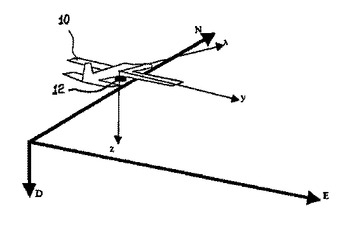 (もっと読む)
(もっと読む)
マップデータ作成装置、それを備えた移動体、並びにマップデータ作成方法
周囲を撮影するカメラと、GPS受信部と、地図情報が記憶された地図情報記憶部と各部の動作を制御する制御部とを備え、この制御部によって、カメラが撮影した画像データを、GPS受信部によって検知した撮影時の位置情報と関連付け、さらに、位置情報に関連付けた画像データを、地図情報に関連付けてマップデータを作成する。これにより、移動中に撮影した周囲の画像と地図情報とを関連付けたマップデータを作成することができる。 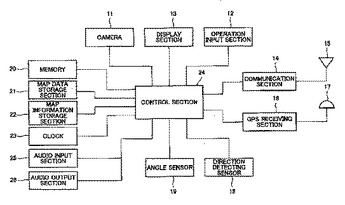 (もっと読む)
(もっと読む)
車両用表示装置、車両、表示方法、画像表示プログラム、および記録媒体
図1(a)に示すスピードメーター11が運転者の正面になるように画面10を配置する。右折指示を検出すると、図1(b)に示すように、ウインカー17を表示させるとともに右後方画像18を画面10の右側に表示する。左折指示を検出すると、図1(c)に示すように、ウインカー19を表示させるとともに左後方画像20を画面10の左側に表示する。左右に応じて異なる位置に表示させるので、直感的把握が容易となり、操作性を向上できる。すなわち、自動車に搭載される表示装置によって、自動車の操作性を確実に向上させる。 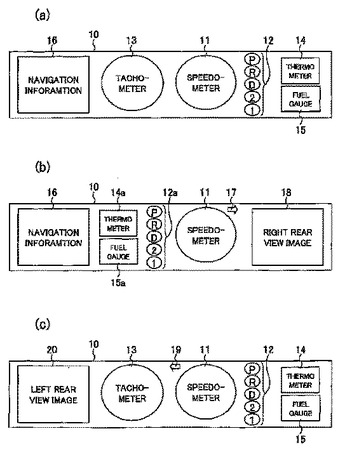 (もっと読む)
(もっと読む)
文字認識装置、移動通信システム、移動端末装置、固定局装置、文字認識方法および文字認識プログラム
移動可能なカメラで撮影した情景画像中に含まれうる単語を、単語辞書もしくは地図データベースを用いて効率的に抽出できるようにする。
位置情報取得手段101は、装置の現在位置を測位して位置情報を取得する。方位情報取得手段102は、装置の向きを検出して方位情報を取得する。文字列認識手段104は、現在位置情報と方位情報とにもとづいて、情景画像の撮影範囲を特定する。文字列認識手段104は、撮影範囲の位置に対応づけられている店舗名、建築物名および地名などの情報を、地図データベース103から抽出する。そして、文字列認識手段104は、抽出した店舗名、建築物名および地名などの単語知識を用いて文字認識を行う。
(もっと読む)
ナビゲーションシステム、携帯情報端末装置、サーバ、およびナビゲーション方法
本発明のナビゲーションシステムによれば、位置が特定できる文字を携帯電話装置(1)に内蔵された撮像部(12)で撮像することによって、ユーザは煩雑な操作をすることなく、所望の位置が特定可能な被写体を撮像するだけで、推奨経路の目的地や表示画面の位置指定等を行うことができる。また、画面表示が貧弱あるいは表示部を有しないナビゲーション装置(2)においても、携帯電話装置(1)が有する表示部(10)を利用することによって、ユーザが容易に検索結果を確認することができる。 (もっと読む)
ナビゲーション装置
現在位置測位部(1)で測位した現在位置情報と、現在位置の情景をカメラ部(2)で撮影した映像とを、無線送受信部(4)を通して外部に送信する。一方、目的地を入力すると共に現在位置から目的地までの経路を設定し、さらに設定した経路内で、現在位置より予め定めた何km先といった位置を操作部(9)で指定することによって、指定された位置情報をもった映像情報が無線送受信部(4)を通して受信され、受信された映像は、表示部(8)で表示される。これによって、目的地までの経路内で予め指定した位置の情景をあらかじめ受信し表示することができる。 (もっと読む)
距離算出装置および算出プログラム
移動物体と対象物との間の方位角や、速度、ヨーレートなどの各種の状態量に基づいて、移動物体と対象物との間の距離を正確に算出することを目的とする。算出装置1は、移動物体と対象物との間の方位角を算出する手段2と、2つの時点間の移動物体の移動距離を算出する手段3と、移動方向の角度変化量を算出する手段4と、手段2、手段3、手段4の出力を用いて移動物体から対象物までの直線距離を算出する手段5とを備える。 (もっと読む)
ナビゲーション装置
車両内に居る人に位置を分かりやすく提供可能なナビゲーション装置を提供することを課題とする。車両に搭載され、ターンバイターン方式により、又は音声のみを使って車両を案内するナビゲーション装置は、制御部(21)と、近距離無線通信部(14)とを備える。制御部(21)は、車両の位置を導出した後、導出された位置周辺の地図画像データを取得する。近距離無線通信部(14)は、車内空間をカバー可能な通信エリア内に電波を送出可能であって、制御部(21)により導出した位置と地図画像データとを、自身の通信エリア内に位置する移動体通信端末装置(30)に送出する。移動体通信端末装置(30)は、近距離無線通信部(14)により送出された位置及び地図画像データを受信し表示する。 (もっと読む)
ナビゲーション装置
誤差数cmの範囲で移動体の現在位置を示すことができるナビゲーションシステムを提供する。 ナビゲーション装置100は、車両等の移動体に備えられたカメラにより得られる現実の映像に基づき、当該移動体から観察される範囲における映像的な特徴点の三次元座標を含む所定の三次元情報を予め生成する特徴点三次元地図生成装置110と、その所定の三次元情報を記録した記録媒体120と、移動体に備えられたカメラにより得られる現実の映像を、記録媒体120に記録された所定の三次元情報と比較し、現実の映像と一致する三次元座標上の地点と方向を求め、移動体に備えられたカメラの三次元座標上の位置,速度,加速度,視点方向,3軸回転姿勢,3軸回転速度,3軸回転加速度等の所定項目を出力,表示する地点検索ナビゲーション装置130とを備えている。 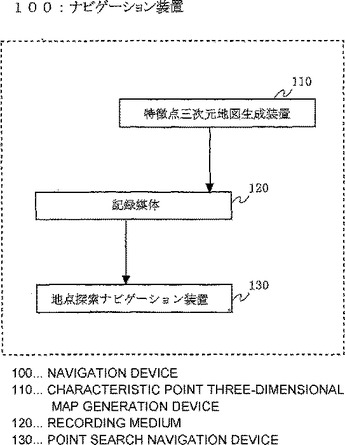 (もっと読む)
(もっと読む)
自動二輪車用の走行情報蓄積方法および走行情報蓄積システム
【課題】 自動二輪車の走行支援のために適切なバンク角を記憶できる自動二輪車用の走行情報蓄積方法を提供する。
【解決手段】 自動二輪車の走行情報を蓄積する方法であって、自動二輪車の座標データを得る工程(S10)と、自動二輪車の左右バンク角を算出する工程(S20)と、前記座標データと前記左右バンク角とをリンクして記憶する工程(S30)とを包含する、自動二輪車用の走行情報蓄積方法である。
(もっと読む)
道案内システムおよび道案内方法
道案内サーバ(1)は、道路情報に含まれる交差点に対応して、基準となる方位が規定された三次元画像を三次元画像DBに記憶する。この道路情報は、道路に関する情報及び、道路上の交差点に関する情報を含んだ情報として、地図データサーバ(2)の地図DBに記憶される。道案内サーバ(1)は、ネットワーク(9)を介して接続された利用者端末(3)からの要求に応答して、特定された交差点の三次元画像を三次元画像DBから読み出し、読み出した三次元画像中に、地図データサーバ(2)が道路情報に基づいて探索した誘導経路に従って、利用者が進むべき道路を示すシンボルを合成することにより交差点案内画像を生成する。道案内サーバ(1)は、生成した交差点案内画像を利用者端末(3)に送信する。利用者端末(3)は、道案内サーバ(1)から送られる交差点案内画像を受信すると、受信した三次元案内画像を、その表示方位を変更可能に表示する。 (もっと読む)
2,041 - 2,058 / 2,058
[ Back to top ]