
Fターム[2F129GG17]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援機器 (2,561) | 撮像機器 (2,058)
Fターム[2F129GG17]に分類される特許
321 - 340 / 2,058
位置標定装置、位置標定方法および位置標定プログラム
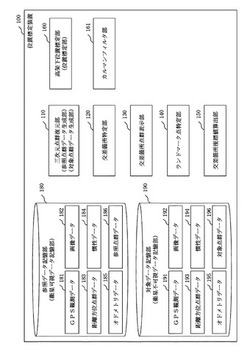
【課題】GPS衛星が不可視である場所についても測量を行わずに高い精度で測位結果を得られるようにすることを目的とする。
【解決手段】交差箇所特定部120は普通道路の交差箇所の画像(参照画像)と高架下道路の交差箇所の画像(対象画像)を特定する。交差箇所点群表示部130は、参照画像に普通道路で取得されたレーザ点群(参照点群)を重畳して表示し、対象画像に高架下道路で取得されたレーザ点群(対象点群)を重畳して表示する。ランドマーク点特定部140は、参照画像と対象画像とに共通して映っているランドマークに重畳するランドマーク参照点とランドマーク対象点とを特定する。交差箇所座標値算出部150は、ランドマーク参照点の三次元座標値とランドマーク対象点の距離方位とに基づいて交差箇所座標値を算出する。高架下位置標定部160は、交差箇所座標値と慣性データ194とに基づいて高架下道路の走行位置を標定する。
(もっと読む)
画像収集システム、携帯端末、画像収集装置、及び画像収集方法

【課題】 システム提供者の人的コストを抑えつつ、ランドマークの撮影画像を網羅的に収集する画像収集システムを提供する。
【解決手段】 画像収集システム100は、不特定のユーザに所持される撮影端末10と、画像収集装置20とからなる。撮影端末10は、撮影により撮影画像を取得する撮影部11と、撮影部11にて取得された撮影画像を含む投稿情報を生成する投稿情報生成部14と、投稿情報を送信する通信部15とを備えている。画像収集装置20は、撮影端末10の通信部15より送信された投稿情報を受信する通信部21と、投影情報に含まれる撮影画像に現れたランドマークを特定するランドマーク特定部24と、投稿情報又はランドマーク特定部24にて特定されたランドマークに応じて、投稿情報に含まれる撮影画像を評価して、評価結果を出力する撮影画像評価部26とを備えている。
(もっと読む)
可動物予測装置及びプログラム
【課題】適切な精度で、可動物の将来の位置及び移動状態を予測することができると共に、計算量の増大を抑制することができるようにする。
【解決手段】行動変化度算出部44は、検出された可動物の各々について、可動物の種類及び位置に基づいて、可動物の行動変化度を算出する。予測方法選択部46は、可動物の各々について、行動変化度が閾値未満である場合、可動物の種類、位置、及び移動状態に基づいて、可動物単位で、可動物の将来の位置及び移動状態を線形予測し、算出された行動変化度が閾値以上である場合、可動物を表わす複数の可動物粒子の各々について将来の位置及び移動状態を予測することにより、可動物の将来の位置及び移動状態を予測する。
(もっと読む)
車載用ナビゲーション装置
【課題】不要な処理負荷の増大を生じさせずに路面の撮影を行える車載用ナビゲーション装置を提供する。
【解決手段】自車両200周辺の路面を撮影し画像信号を出力するカメラ105と、自車両200の現在地を検出する現在地検出装置104と、現在地と記憶された道路地図データ103aとに基づいて、自車両200が交差点に接近したことを検知する交差点検知部101dと、交差点検知部101dによる検知に応じて、当該交差点において自車両200が一旦停止すべきか否かを判定する停止判定部101gと、停止判定部101gにより一旦停止すべきであると判定されたことに応じて、カメラ105の動作を開始させる状態切替部101eと、を備えることを特徴とする車載用ナビゲーション装置100。
(もっと読む)
情報表示装置、情報表示システム、情報表示サーバ、情報表示端末、及び、情報表示方法
【課題】 利用者の嗜好に適合した情報を表示する。
【解決手段】 本発明の情報表示装置は、周辺情報を保持する周辺情報保持部と、選択指示を受けて選択された周辺情報に関する情報を登録情報として保持する登録情報保持部と、登録情報に基づき利用者の嗜好に応じた周辺情報の選択情報を設定する嗜好分析部と、画像情報を取り込む撮影部と、撮影部の略位置を示す位置情報を取得する位置情報取得部と、略位置の所定の範囲に入る周辺情報を検索し検索後の周辺情報を選択情報に基づき整列する検索部と、検索部によって整列された選択情報のうち整列順の上位の周辺情報と前記画像情報とを重ねて又は合成して表示する情報表示部とを備えることを特徴とする。
(もっと読む)
情報処理装置、情報処理システム、及びプログラム
【課題】撮影された映像の視界空間上の座標に対して関連づけられたタグを用いることのできる情報処理システムを提供する。
【解決手段】情報処理装置100は、コンテンツを撮影する撮像装置の位置である視点位置の情報を取得する視点情報取得部121と、上記視点位置から上記コンテンツを撮影したときの視界空間を示す視界情報を取得する視界情報取得部122と、上記視点情報、上記視界情報、及び奥行き情報により特定される視界空間上の座標位置と関連づけられたタグの情報を生成するタグ情報生成部124とを有する。
(もっと読む)
端末位置特定システム、移動端末及び端末位置特定方法
【課題】AR技術において、移動端末の位置を高精度且つ確実に特定することが可能とする。
【解決手段】端末位置特定システムでは、移動端末の概略位置情報に基づき、当該概略位置から所定の距離以内に存在するランドマークのランドマーク情報が検索され、検索されたランドマーク情報が移動端末に送信される。これにより、移動端末は、移動端末の周辺に存在するランドマークに関するランドマーク情報を取得することができる。また、サーバにおいて予め記憶されていたランドマーク情報が移動端末に送信されるので、確実にランドマーク画像に基づく移動端末の位置特定を行うことが可能となる。そして、ランドマーク画像に基づき当該画像の撮影位置が解析され、その撮影位置が移動端末の所在位置として移動端末において管理され、位置の補正に用いられるので、高精度な移動端末の位置特定が可能となる。
(もっと読む)
車載用情報端末
【課題】車両のおかれた状況に関わらず、最適なタイミングで情報をユーザに提供する車載用情報端末を提供する。
【解決手段】ナビゲーション装置は、自車両の運転者に報知すべき報知情報を取得する(ステップS10)と、その報知情報の緊急度の判断(ステップS20)と、運転者の運転負荷の判断(ステップS60)とをそれぞれ繰り返し行う。その結果、ステップS20で報知情報の緊急度が高いと判断するか、またはステップS60で運転者の運転負荷が低いと判断するまで、ステップS20〜S70の処理を繰り返し実行して報知タイミングを遅延させる。こうして報知情報の報知タイミングを決定し、決定された報知タイミングにしたがって報知情報を報知する(ステップS80)。
(もっと読む)
車載勾配推定装置、勾配推定方法
【課題】車両がブレーキング中であっても正しい勾配を推定できるようにする。
【解決手段】第一勾配推定部104は、車両情報取得部101から出力された車両情報に基づいて、自車両の走行地点の勾配を推定するための演算を行う。第二勾配推定部105は、高度情報取得部102からの高度情報や、走行地点情報取得部103からの走行地点情報、記憶部107に記憶されている過去の勾配履歴などに基づいて、自車両の走行地点の勾配を推定するための演算を行う。選択部106は、自車両のブレーキがオフである場合は第一勾配推定部104を選択し、ブレーキがオンである場合は第二勾配推定部105を選択するようにスイッチを切り替える。
(もっと読む)
ナビゲーション及びインスペクションシステム
【課題】地理的空間内における状況の変化を、移動中の車両から検出する。
【解決手段】地理的空間の画像を、GPS座標と共に、GPS座標と関連させて記憶する。同じ地理的空間を、移動する車両により経路のGPS座標にアクセスしながら通過する。記憶された画像のGPSデータを通過した地理的空間のGPSデータと同調させることによって記憶された画像16を再生し、記憶された画像16と通過する地理的空間画像15とを同時に閲覧可能にする。移動中の車両内で移動する観察者は、記憶された画像16と通過する空間の画像15とを比較して、状況の変化を確認する。
(もっと読む)
ナビゲーション装置
【課題】必要に応じて自動的に投射映像の表示が開始される車載用ナビゲーション装置を提供する。
【解決手段】自車両の周辺を撮影し映像信号を出力するカメラ群180と、自車両が走行する道路において、自車両が走行可能な道路幅が所定幅以下であることを検知する隘路検知部113と、検知に応じて、道路において自車両による走行が困難か否かを判定する難路判定部114と、難路判定部114により走行が困難であると判定されたことに応じて、映像信号に基づく投射映像を表示する投射映像表示部117と、を備える車載用ナビゲーション装置100。
(もっと読む)
駐車支援システム、ナビゲーション装置
【課題】駐車場において複数の駐車区画が駐車可能である場合に、適切な駐車区画を対象として駐車支援を行う。
【解決手段】ナビゲーション装置1の制御部10において、自車両が駐車場において駐車しようとしているか否かを判断し、駐車しようとしている場合は、各カメラ2に対して、各カメラ2の動作を制御するための制御信号を出力する。そして、各カメラ2から出力される画像信号を受信して自車両の周囲の撮影画像を取得し、これに基づいて、自車両の全周囲を俯瞰した様子を示すアラウンドビュー画像を合成する。アラウンドビュー画像においてユーザが入力装置17の操作によりいずれかの空き駐車区画を指定すると、その駐車区画を対象として自車両の駐車支援を行う。
(もっと読む)
カーブ進入制御装置
【課題】実際に走行する分岐先道路に適した制動警報を行うことにより、ドライバへの違和感を軽減する。
【解決手段】高速道路の分岐路を進む際のカーブ進入制御装置であって、この装置は、自車前方の本線道路の分岐である分岐情報及び自車位置情報と、走行中の道路を撮像する撮像手段により検出した走行車線情報に基づいて、前方分岐における走行予定車線を推定する走行予定車線推定手段(S30)と、走行予定車線推定手段により推定された走行予定車線に基づいて、制動警報を作動させるか否かを判断する制動警報判断手段(S110)とを備える。
(もっと読む)
ナビゲーション装置
【課題】カメラからの映像を、地図情報と自車位置とのマップマッチング以外の用途にも利用することが可能なナビゲーション装置を提供する。
【解決手段】自車両の周辺を撮像し撮像信号を出力するリアカメラ24と、自車両の走行状態を表す信号を出力する振動ジャイロ14aおよび速度センサ14bと、リアカメラ24が出力する撮像信号に基づいてキャリブレーション情報を演算する演算部35と、キャリブレーション情報に基づいて、振動ジャイロ14aおよび速度センサ14bのキャリブレーションを行うキャリブレーション部36とを備えるナビゲーション装置。
(もっと読む)
運転支援装置
【課題】車両区画線の位置を適正に推定し、適正な運転支援情報を出力する。
【解決手段】車両に搭載され、運転者に対して運転支援情報を出力する運転支援装置であって、車両が走行する車線の右側及び左側に敷設されている車両区画線を検出する白線検出手段と、車両の位置情報、及び、地図情報に基づいて、車両の前方に、車両が走行している道路の分岐箇所が有るか否かを判定する分岐判定手段と、道路の分岐箇所における車両の進行方向を推定する方向推定手段と、分岐判定手段によって道路の分岐箇所が有ると判定された場合に、道路の分岐箇所において、運転支援情報の出力に用いる仮想的な車両区画線である仮想区画線を、方向推定手段によって推定された進行方向ではない分岐路を横断するべく生成する仮想線推定手段と、仮想線推定手段によって推定された仮想区画線の位置に基づいて、運転支援情報を出力する情報出力手段と、を備える。
(もっと読む)
ドライブレコーダ
【課題】ユーザの操作を必要とすることなく撮影した画像が記憶され、かつ機密情報の保護が図られるドライブレコーダを提供する。
【解決手段】制限有無判断部62は、位置検出部21で検出した車両の位置から、車両がカメラ61での撮影が制限される制限領域にあるか判断する。上限加速度変更部63は、車両が制限領域にあると判断されたとき、一時記憶部52から保存データ記憶部53に画像データを記憶する閾値を上限加速度から制限時上限加速度へ変更する。そのため、車両が制限領域にある場合、一時記憶部52の画像データは、通常よりも大きな加速度が車両に加わったときに保存データ記憶部53に記憶される。また、暗号化部64は、保存データとして記憶される画像データに暗号化処理を施す。そのため、制限領域において記憶された保存データは、任意に再生することができない。
(もっと読む)
ナビゲーション装置、車載センサの精度推定方法、および、プログラム
【課題】車載センサの信頼度を簡易な方法で推定する技術を提供する技術を提供する。
【解決手段】ナビゲーション装置100は、車載センサの精度を推定するナビゲーション装置であって、特定の区間の距離が記録されている地図データを記憶している記憶手段と、車載センサを用いて、当該区間の距離を計測する計測手段と、地図データに記録されている距離と、計測手段で計測された距離と、のずれ量に基づいて、車載センサの精度を推定するセンサ精度推定手段と、を備える。
(もっと読む)
案内方法、案内制御装置及びプログラム
【課題】案内方法、案内制御装置及びプログラムにおいて、案内の品質を低下させることなく案内時間を短縮することを目的とする。
【解決手段】案内制御装置は、目的地別に、その目的地へ案内された複数の利用者が案内の利用を終了した案内終了位置を保存する。目的地までの経路生成と同時に経路案内を順に生成し、保存した案内終了位置を用いて、一定割合の人が案内の利用を終了したある地点に到達するまでは案内装置により利用者を逐次誘導し、そのある地点に到達後は残りの経路に対する経路案内をまとめて案内して利用者を誘導する。
(もっと読む)
緊急通報システムおよび緊急通報方法
【課題】即時性、確実性をもって緊急情報を通報することができる「緊急通報システムおよび緊急通報方法」を提供する。
【解決手段】緊急通報システム10は、移動体の緊急状態を検出する検出手段と、移動体に搭載されており、外部と通信を可能にする複数の通信端末30A〜30Nと、緊急連絡先を含む緊急情報を記憶する記憶手段と、緊急状態が検出されたとき、緊急連絡先に基づき複数の通信端末に同時に通信を開始させる制御手段とを有する。これにより、複数の携帯端末30A〜30Nは、移動体の位置情報を含む緊急情報を同時に送信する。
(もっと読む)
車両走行案内システム
【課題】 走行中の車両への的確な情報提供が行われるとともに、走行中の車両において迂回経路の算出を適切に実行することができる車両走行案内システムを提供する。
【解決手段】 基地局1では、複数の車両2から送信される車両走行情報に基づいて、所定の道路RJM上に存在する渋滞の最後尾車両位置LASTVPが推定され、その最後尾車両位置LASTVPを示す情報が走行中の車両2に送信される。システムを構成する車両2により、自車両の走行状況を示す車両走行情報が基地局1に送信されるとともに、ナビゲーション装置22による経路誘導中において、所定の道路RJMが誘導経路中に含まれるときは、基地局1から送信される最後尾車両位置LASTVPを示す情報を用いて、迂回経路の算出の要否が判定され、迂回経路の算出が必要と判定されたときは、ナビゲーション装置22に迂回経路の算出が指示される。
(もっと読む)
321 - 340 / 2,058
[ Back to top ]