
Fターム[2H051BA47]の内容
自動焦点調節 (17,376) | TTL測距方法 (3,889) | ボケ検出法によるもの (2,631) | 映像信号を用いるもの (1,496)
Fターム[2H051BA47]に分類される特許
81 - 100 / 1,496
カメラ
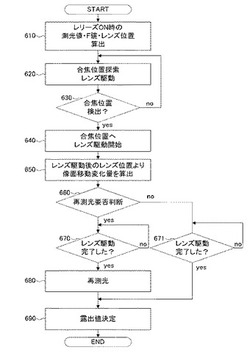
【課題】撮像素子の出力を用いて、測光やオートフォーカスを行うカメラにおいて、測光処理に要する時間を削減し、レリーズタイムラグを短縮する。
【解決手段】レリーズON時の測光値、絞り値、AF系のレンズ位置を記憶し(ステップ610)、AF完了後のレンズの合焦位置と、レリーズON時のレンズ位置とに基づいて像面位置変化量を算出し(ステップ650)、像面位置変化量が所定の閾値を超過した場合のみ、再測光を実行し(ステップ680)、閾値以下の場合は、レリーズON時の測光値を用い、再測光を省略して露出値を確定させる(ステップ690)ことで、レリーズタイムラグを短縮する。
(もっと読む)
電子カメラ

【構成】撮像装置16は、フォーカスレンズ12を通して被写界を捉える撮像面を有し、被写界像を繰り返し出力する。CPU30は、シャッタボタン44sの半押しに対応して撮像装置16から出力された被写界像の高域AF評価値および中域AF評価値に基づいて相対比を算出し、算出された相対比の大きさに応じて異なる広がりを示すレンズ移動範囲を定義し、そして合焦点の探索のためにフォーカスレンズ12を定義されたレンズ移動範囲で移動させる。CPU30はまた、シャッタボタン30が半押しされた時点のフォーカスレンズ12の位置に応じて異なるように、レンズ移動範囲の定義特性を調整する。
【効果】合焦性能が向上する。
(もっと読む)
分析装置,オートフォーカス装置、及びオートフォーカス方法
【課題】本発明の目的は、コントラスト検出方式オートフォーカスでのフォーカスずれ方向検出に関する。
【解決手段】本発明の手法は、観察対象の近傍に高さが異なる複数の構造体、あるいは掘り込みを配置し、それら各々のフォーカス評価値をそれぞれ算出する。これらのフォーカス評価値の差異により、フォーカスずれ方向を識別する。フォーカスずれ方向が判別できることにより、像を喪失することなく観察対象を観察し続けることができる。
(もっと読む)
電子カメラ
【構成】イメージャ16は、被写界を捉える撮像面を有して被写界像を繰り返し生成する。CPU26は、辞書DC_1〜DC_3に収められた顔パターンに符合する顔画像をイメージャ16によって生成された被写界像から探索し、発見された顔画像に相当する動物に注目して撮像パラメータを調整する。CPU26はまた、辞書DC_1〜DC_3に収められた顔パターンに符合する顔画像を撮像パラメータの調整処理が完了した後にイメージャ16によって生成された被写界像から探索し、発見された顔画像に対応する被写界像を記録媒体42に記録する。
【効果】撮像性能を向上させることができる。
(もっと読む)
撮像装置
【課題】迅速に次の撮影を行う。
【解決手段】撮影レンズを透過する被写体像を撮像する撮像手段と、撮像手段からの画像データを用いて被写体像のライブビューを表示する(S1)表示手段と、表示手段によるライブビュー時に、撮像手段からの画像データを用いてコントラスト方式による焦点検出を行う(S3)焦点検出手段とを有する撮像装置であって、被写体に対する撮影レンズの焦点状態を認識するための被写体情報を検出する被写体情報検出手段と、焦点検出手段による焦点検出後に、撮影画像の露光(S7)を行わせてから、再び焦点検出手段による焦点検出が可能な状態に復帰させるまでの間(S9〜S11)に、被写体情報検出手段による被写体情報検出を行わせる(S102)制御手段とを有する。
(もっと読む)
立体撮影装置および撮影制御方法
【課題】平面画像および立体画像をそれぞれ適切な撮影条件で撮影することができるとともに、平面画像と立体画像とのタイムラグを低減すること。
【解決手段】平面画像の撮影範囲に対応する露出量EVAと立体画像の撮影範囲に対応する露出量EVBとの差分(露出量差)を△EVとしたとき、△EV≦閾値である場合には、撮影範囲が小さい方の画像に対応する露出量を用いると判定し、△EV>閾値である場合には、EVA、EVBをそれぞれ用いると判定する撮影条件判定部75と、露出量以外の撮影条件の差分が許容範囲内であって、△EV≦閾値である場合には、平面画像および立体画像の両方を一回の露出で取得し、△EV>閾値である場合には、小さい方の露出量で露出を行って第1の撮像画像を生成するとともに、△EVで露出を行って第2の撮像画像を生成し、画像合成部77により前記第1の撮像画像と前記第2の撮像画像とを合成する撮影制御部76を備えた。
(もっと読む)
撮像装置及び撮像制御方法
【課題】画像から認識したオブジェクトが変化した場合であっても、合焦精度を向上させる。
【解決手段】所定の画角の撮影画像を取得する撮影手段と、撮影画角内に設定されたフォーカスエリアの被写体に対して自動的に合焦させるオートフォーカス手段と、撮影画像からオブジェクトを抽出する抽出手段と、前記抽出したオブジェクトの変化を検出する検出手段と、前記抽出したオブジェクトが変化している変化時間を計測する計測手段と、前記フォーカスエリア内のオブジェクトの変化が検出されると、前記オートフォーカス手段を連続的に動作させる制御手段と、前記フォーカスエリア内のオブジェクトの変化時間が所定時間を超えると、前記フォーカスエリアを前記撮影画角内の異なるエリアに変更するフォーカスエリア変更手段とを備えた撮像装置によって上記課題を解決する。
(もっと読む)
撮像装置
【課題】現在選択されている撮影モードを容易に認識することができる撮像装置を提供する。
【解決手段】複数の撮影モードのうち一つを選択して撮影することができる撮像装置であって、被写体像を形成する光学系11と、前記被写体像に基づいて画像データを順次生成する撮像手段12と、前記画像データに含まれる特徴領域を検出する検出手段14と、前記画像データに基づく画像を表示する表示手段20と、前記検出手段14が前記特徴領域を検出したときに、前記特徴領域又はその近傍に前記選択された撮影モードを示す表示を前記画像データに基づく画像と重畳させて前記表示手段20に表示させる制御手段と、を備えること、を特徴とする。
(もっと読む)
顕微鏡システム
【課題】合焦精度を向上させ、且つ、観察体の画像の取得処理速度を向上可能な顕微鏡システムの提供。
【解決手段】第一の撮像手段15が撮像する領域よりも手前の領域を撮像する第二の撮像手段20が撮像した画像を用いて、第一の撮像手段の撮像位置での当該領域についての対物レンズ12の合焦位置を調整する自動合焦制御手段21と、第一の撮像手段が撮像する観察体における分割領域と第二の撮像手段が撮像する観察体における分割領域との距離と、載置手段11の水平方向への移動速度とに応じて、第二の撮像手段で撮像された観察体における分割領域を第一の撮像手段の撮像位置に搬送するタイミングと、第二の撮像手段で撮像された観察体における分割領域の像の結像位置を第一の撮像手段の撮像面に位置させるタイミングとが略一致するように制御する搬送・合焦位置調整タイミング制御手段23を備える。
(もっと読む)
レンズ駆動装置、オートフォーカスカメラ及びカメラ付き携帯電話
【課題】部品点数が少なく、安価で且つ簡易な制御で手振れ補正できるレンズ駆動装置、オートフォーカスカメラ及びカメラ付き携帯電話を提供する。
【解決手段】レンズ支持対5をX―Y方向に移動する手振れX−Y駆動部32と、レンズの結像位置に設けた主画像センサ31と、主画像センサ31の外周部に設けたX方向画像センサ38a、38bと、Y方向画像センサ39a、39bと、制御部25とを備え、制御部25はX方向画像センサ38a、38b及びY方向画像センサ39a、39bにおいて、各々現在のコントラストの高域成分領域と時間的ずれをもって記録された過去のコントラストの高域成分領域の位置のずれ量を算出し、X―Y駆動部は制御手段が算出したX方向のずれ量とY方向のずれ量だけレンズ支持体5を主画像センサ31に対して移動させることにより手振れ補正する。
(もっと読む)
撮像装置
【課題】オートフォーカス制御が可能な撮像装置において、撮像装置をパンニングする場合であっても、高速なオートフォーカス制御を行なう。
【解決手段】電子カメラ1がパンニングされる前に、第1の被写体についてオートフォーカス動作を行い、合焦した時の撮像素子104の撮像した画像を取得して記憶し、第2の被写体へのパンニング時に加速度センサ124及び角速度センサ126の出力より電子カメラ1の移動量を検出する。そして、パンニング終了後に撮像素子104の撮像した画像を取得し、パンニング前の画像とパンニング終了後の画像と、加速度センサ124、角速度センサ126の出力から求めた電子カメラ1の移動量とに基づいて第2の被写体の距離に関する情報を算出する。そして、算出した第2の被写体の距離に関する情報に基づいてオートフォーカス動作を行う。
(もっと読む)
撮像装置
【課題】シャッターチャンスを逃さずに、写り込みの影響を軽減する撮像装置を提供する。
【解決手段】撮像装置は、撮像素子を備える。フォーカシングレンズを備える。撮像素子で撮像して得られた画像信号に画像処理を施す画像処理部を備える。画像処理部は、合焦制御において、フォーカシングレンズを光軸方向に移動させながら、画像信号から得られる輝度信号に基づくコントラスト検出値を生成する。合焦制御においてフォーカシングレンズが近距離合焦領域を移動する間に、画像上にコントラスト検出値が大きく変化しない領域がある場合に、画像処理において、領域を除外した切り出しを行う。
(もっと読む)
複眼撮像装置
【課題】撮像手段の固体差により一部の撮像手段のみ合焦位置が取得できない場合にも、合焦位置が取得できなかった撮像手段の合焦位置を短時間で取得することができる。
【解決手段】レリーズボタンの半押しに応じて右撮像系及び左撮像系のそれぞれについてMODから望遠側をAFサーチする(ステップS11)。左右のいずれかの撮像系で合焦位置が見つかった場合(ステップS12でNO)には、温度によるサーチ範囲の変化により左右のいずれかの撮像系で合焦位置が見つからない場合であるため、右撮像系12の合焦曲線及び左撮像系13の合焦曲線に基づいて、合焦位置が見つからなかった撮像系の合焦位置を検出するためにフォーカスレンズを移動させる距離dを算出する(ステップS14)。合焦位置が検出されなかった撮像系のフォーカスレンズを、MODから距離d+固定値分だけ至近側の位置とMODとの間の範囲を追加サーチする(ステップS15)。
(もっと読む)
立体撮影装置および撮影制御方法
【課題】平面画像の撮影範囲と立体画像の撮影範囲とが異なる場合にそれぞれ最適の撮影条件で撮影された平面画像および立体画像を取得すること。
【解決手段】第1の撮影レンズ30Lと被写体を撮像して第1の撮像画像を生成する第1の撮像素子34Lとを有する第1の撮像系11Lと、第2の撮影レンズ30Rと前記被写体を撮像して第2の撮像画像を生成する第2の撮像素子34Rとを有する第2の撮像系11Rと、合焦位置および露出量のうち少なくとも一方を撮影条件として検出する際に、平面画像の撮影範囲に対応する第1の検出エリアにて第1の撮影条件を検出するとともに、前記平面画像の撮影範囲とは異なる立体画像の撮影範囲に対応する第2の検出エリアにて第2の撮影条件を検出する撮影条件検出部73を備えた。
(もっと読む)
電子カメラ
【課題】 被写体までの距離に基づいた撮影倍率に自動的に調整した上で撮影を行う。
【解決手段】 光学ズーム倍率を変更することが可能な撮像光学系と、被写体距離を検出する検出部と、設定された前記光学ズーム倍率に基づいて、撮影が許容される距離を示す撮影許容距離を算出する算出部と、検出部における被写体距離が算出部によって算出された撮影許容距離から外れた場合に撮像光学系における光学ズーム倍率を変更し、被写体距離と撮影許容距離とを一致させる制御部と、を備えたことを特徴とする。
(もっと読む)
画像処理装置、カメラ及び画像処理方法
【課題】複数の顔と共に複数の顔枠を表示する場合でも、立体視する観察者の立体感を阻害することなく且つ目の疲労を抑えること。
【解決手段】複数の撮像手段でそれぞれ撮像して得られる複数の撮像画像から構成される 立体撮像画像を入力する立体画像入力部101と、前記各撮像画像における顔の位置を特定する顔位置特定部124と、前記各撮像画像における合焦位置を特定する合焦位置特定部146、前記顔の位置と前記複数の撮像手段の基線長及び輻輳角とに基づいて 、前記顔の位置の距離情報を取得する距離情報取得部144と、前記合焦位置と前記顔の位置の距離情報とに基づいて、前記顔の位置の焦点状態を特定する焦点状態特定部148と、前記顔の位置を示す顔枠であって、前記顔の位置の焦点状態に応じてぼかした顔枠を生成する顔枠生成部160と、前記生成した顔枠及び前記立体撮像画像から、立体表示画像を生成する立体表示画像生成部180を備えた。
(もっと読む)
レンズ駆動装置、オートフォーカスカメラ及びカメラ付き携帯電話
【課題】レンズの光軸方向への移動及び光軸の傾きを補正できると共に、光軸方向の寸法を小さくできるレンズ駆動装置、オートフォーカスカメラ及びカメラ付き携帯電話を提供する。
【解決手段】レンズ支持体5の外周面に周方向に巻回した巻回コイル16a、16bと、レンズ支持体5の外周に周方向に間隔をあけて配置した複数の環状コイル19a〜19dと、ベース8に固定したマグネット17と、各コイルへの通電を制御する制御部25とを備え、環状コイル19a〜19dは巻回コイル16a、16bの外周面に重ねて配置してあり、各マグネット17は環状コイル19a〜19dに対面しており、制御部25はレンズ支持体5を光軸方向に移動するときには巻回コイル16a、16bに電流Aを流し、レンズの光軸の傾きを補正するときには対応する環状コイル19a〜19dに電流Bを流す。
(もっと読む)
レンズ駆動装置、オートフォーカスカメラ及びカメラ付き携帯電話
【課題】レンズの光軸方向への移動及び光軸の傾きを補正できると共に、光軸方向の寸法を小さくできるレンズ駆動装置、オートフォーカスカメラ及びカメラ付き携帯電話を提供する。
【解決手段】レンズ支持体5の外周に周方向に間隔をあけて配置した複数の環状コイル19a〜19dと、レンズ支持体を前後に移動自在に支持するベース8に固定したマグネット17と、環状コイル19a〜19dへの通電を制御する制御部25とを備え、環状コイル19a〜19dは側面視矩形の環を形成しており、マグネット17は矩形の環状コイルにおける前側辺部21に対面しており、制御部25はレンズ支持体5を光軸方向に移動するときには各環状コイルに均等な電流値Aの電流を流し、レンズの光軸の傾きを補正するときには対応する環状コイルに流す電流値A+Bに異ならせる。
(もっと読む)
撮像装置および画像処理方法
【課題】構成の複雑化、コスト増を招くことなく、遠/近の何れにあるかを容易かつ精度良く判別でき、ひいては距離推定の時間を短縮できることが可能な撮像装置および画像処理方法を提供する。
【解決手段】非点隔差を発生させる撮像光学系11と、撮像光学系11によって結像された撮像画像を電気信号に変換する固体撮像素子12を有し、画像処理部13は、画像のボケ量(PSFの広がり)を検出する機能を含み、画像データに対して撮像光学系の焦点位置から前後それぞれに同量の任意のディフォーカス量に応じた点広がり関数から得られたボケ復元フィルタを用いてフィルタリング処理を施した画像のボケ量を比較することで、画像のピントが焦点位置に対して合っているかまたは前後何れの方にあるかを判定してピント位置に相当する被写体距離の推定を行う。
(もっと読む)
レンズ駆動装置、オートフォーカスカメラ及びカメラ付き携帯電話
【課題】レンズの光軸方向への移動及び光軸の傾きを補正できると共に、光軸方向の寸法を小さくできるレンズ駆動装置、オートフォーカスカメラ及びカメラ付き携帯電話を提供する。
【解決手段】レンズ支持体5の外周に周方向に間隔をあけて配置した複数の環状コイル19a〜19dと、ベース8に固定したマグネット17と、環状コイル19a〜19dへの通電を制御する制御部25とを備え、環状コイル19a〜19dは中空20をレンズ支持体の周方向に沿った長孔にしてあり且つレンズ支持体5の径方向に巻いてあると共にレンズ支持体の側面に固定した内周側部23とレンズ支持体の側面から離れた外周側部21とを形成しており、マグネット17は外周側部21に対面しており、制御部25はレンズ支持体5を光軸方向に移動するときには各環状コイルに均等な電流値Aの電流を流し、レンズの光軸の傾きを補正するときには対応する環状コイルに流す電流値A+Bに異ならせる。
(もっと読む)
81 - 100 / 1,496
[ Back to top ]