
Fターム[2H051BB27]の内容
自動焦点調節 (17,376) | 非TTL測距方法 (370) | 基線長を有しない反射波を用いたもの (52) | 光によるもの (41)
Fターム[2H051BB27]の下位に属するFターム
Fターム[2H051BB27]に分類される特許
1 - 20 / 36
液晶表示装置および測距光学装置
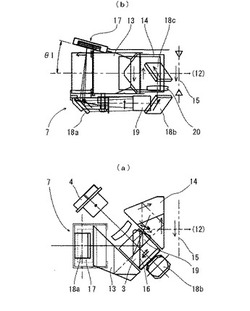
【課題】 ビームスプリッタを備えた測距装置等において、安価で表現の自由度が高い液晶パネルを使用して、高輝度・高コントラストの表示が可能な表示装置を提供する。
【解決手段】 対物レンズと接眼レンズとの間の光路上に介装したビームスプリッタ3を介して、対物レンズからの観察像に、表示装置からの表示画像を合成する装置において、前記表示装置として、LEDをバックライト17aとして備える垂直配向型の液晶パネル17bを設け、かつ前記液晶パネルは、前記接眼レンズ(12)に向けた表示画像の光路L1に対して所定角度だけ傾斜して設ける。
(もっと読む)
撮像装置、撮像方法および撮像プログラム

【課題】画像のプレビュー性を低下させること無く、ピントを視覚的に容易に把握できるようにする。
【解決手段】撮像素子12の受光した光に基づいて生成した表示用画像データD2に基づいた画像を表示部19に表示するDSC100であって、ピントズレを検出するピント部M3と、ピントズレに応じてピント領域Aからずれた位置のズレ画像SIを表示用画像のピント領域Aに対して相加平均もしくは加重平均した合成画像を表示部19に表示させる表示制御部M2と、を備える。
(もっと読む)
光学的情報読取装置
【課題】簡単な構成で液体レンズによるフォーカス機能とズーム機能を備えた光学的情報読取装置を提供する。
【解決手段】光学的情報読取装置1は、電圧の印加で境界面の形状が変化する液体レンズ20A,20Bが、境界面の形状を変化させることで焦点距離が変化し得る所定の間隔を開けて配置されると共に、少なくとも1個の光学レンズ27が配置されたレンズモジュール2と、レンズモジュール2を透過した光信号を光電変換するイメージセンサ30と、各液体レンズ20A,20Bの温度を検知するサーミスタ26A,26Bと、コード記号5までの距離を測定する測距部31と、測距部31で測定された距離情報と、サーミスタ26A,26Bで検知された温度情報に基づき、フォーカス制御及びズーム制御を行うASIC40を備える。
(もっと読む)
撮像装置及びその制御方法
【課題】撮像対象との距離を表す距離画像を生成する際に、撮像対象の光反射やその光沢などの外乱、測定原理等に起因する距離の誤差の低減を実現する。
【解決手段】撮像対象との距離を計測するための画像を撮像する第1の撮像手段110と、第1の撮像手段110で撮像された画像に基づくデータを用いて撮像対象までの距離を算出する距離算出手段130と、偏光成分を計測するための画像を撮像する第2の撮像手段122と、第2の撮像手段122で撮像された画像に基づくデータを用いて偏光状態の解析処理を行う偏光解析手段140と、距離算出手段130で算出された距離に係る距離情報103及び偏光解析手段140で解析処理された偏光状態に係る偏光解析情報105に基づいて、撮像対象の距離画像106を生成する距離画像生成手段150を備える。
(もっと読む)
内視鏡
【課題】光電変換手段において提案されている特性の撮像・観察・記録機器への好適な活用を提案する。
【解決手段】それぞれ可視光域および赤外光域において60%以上の量子効率を有するCIGS系薄膜よりなり規則的に配列された複数の光電変換部と撮像レンズの光軸まわりにそれぞれ一対以上配置される赤、緑、青および赤外の照明光源とを有する内視鏡を提供する。照明光源を2本以上の線対称軸を有するよう配置する。照明光源を光軸まわりの回転対象に配置する。赤、緑、青の照明光源を赤外の照明光源で分断されないよう一団として配置する。緑の照明光源の数を赤および青の照明光源の数より多くする。可視光と赤外光を別に用いる時と同時に用いる時とで撮像レンズの画角とフォーカス位置を変える。
(もっと読む)
表示装置
【課題】曲面に映像を投射表示する際、歪みのない映像表示を実現する表示装置を提供することにある。
【解決手段】対象物までの距離を示す距離情報を出力する測定手段と、当該測定手段から得られる距離情報に基づき、曲面形状を精度良く検出し、検出した曲面形状に合わせて表示画像の画素配置を不均等に再配置させ、少なくとも曲面歪みに対応して補正した映像情報を出力するようにすることによって、曲面に映像を投射表示する際、歪みのない映像表示を実現する。
(もっと読む)
カメラ装置、その撮影方法と撮影制御プログラム
【課題】フラッシュ撮影においても各部の明るさが自然な状態の画像を得ることを可能とする。
【解決手段】光学系と撮像系とを含むメイン撮影ブロック11aとサブ撮影ブロック11bを備え、フラッシュ撮影時には視差が存在する1組の撮影画像からなるステレオ画像を取得する。画像処理部17は、取得したステレオ画像に基づいて、画角内における被写体の各部までの距離を取得する。さらに取得した距離に基づいて、ステレオ画像の一方の撮影画像を対象として、その画像内全域をカメラからの距離が同一の複数の被写体エリアに区分けし、各被写体エリアに含まれる画素の輝度をカメラからの距離に応じて補正する。その際、主たる被写体の前景部分の被写体エリアに含まれる画素の輝度を下げ、主たる被写体の背景部分の被写体エリアに含まれる画素の輝度を上げ、前景部分の白飛びや背景部分の黒つぶれを改善する。
(もっと読む)
測距双眼鏡
【課題】対象物までの距離を測定可能で、焦点調節及び視度調節等の双眼鏡の基本的な機能を損なわずに小型化した測距双眼鏡を提供すること。
【解決手段】接眼レンズ、対物レンズ並びに第1プリズム及び第2プリズムから成る正立プリズムを有する一対の光学系と、ビーム分割面を有し、かつ前記第1プリズム及び第2プリズムの間に配置されるビームスプリッタと、対象物にレーザーを放射する発光部と、対象物から反射したレーザーが入射する受光部と、レーザーが前記受光部に入射することにより対象物までの距離を算出する演算手段と、前記演算手段で算出された結果を表示する測定結果表示手段と、前記一対の光学系、前記ビームスプリッタ、前記発光部、前記受光部、前記演算手段及び前記測定結果表示手段を内蔵する筐体とを備えることを特徴とする測距双眼鏡。
(もっと読む)
内視鏡システムの自動焦点調整方法および内視鏡システム
【課題】簡単な構成で精度良く焦点合わせを行う。
【解決手段】自動焦点調整開始時における撮像素子22内に設定された所定の検出領域SRの受光量が基準受光量P0として取得される。基準受光量を検出した後における検出領域SRの受光量が測定受光量Pmとして取得される。そして、測定受光量Pmおよび基準受光量P0と、自動焦点調整開始時における結像光学系21が有する焦点位置d0とに基づいて被写体までの距離dmが算出され、算出した距離smを用いて結像光学系21の焦点位置が被写体に合わせられる。
(もっと読む)
撮像装置
【課題】 被写体の撮像情報と、距離情報を同時にセンサーから出力する撮像装置において、被写体付近の音声端末装置にて入力された信号を、赤外線信号として本体撮像装置に送信する。
【解決手段】 RGBをそれぞれ吸収する膜と近赤外光を吸収する膜を設けたセンサーと、センサー近くに取り付けた赤外発光素子を用いて、赤外発光素子からの照射光が被写体からの反射光をセンサーの各画素の近赤外光吸収膜で捕らえることにより、距離情報を得ると同時に、被写体までの距離が一定以上となる場合、被写体に備えてある、音声入力端末に入力された被写体近辺の音声情報を、赤外信号に変調して撮像装置に送信し、音声の補助とする。
(もっと読む)
焦点調整機構、検査装置及び焦点調整方法
【課題】パターンの影響を抑制し、焦点調整動作の安定性を図ることができる焦点調整機構を提供すること。
【解決手段】本発明の一態様に係る焦点調整機構は、パターンが形成された試料のパターン形成面に対して対物レンズ13の焦点位置を調整するための焦点調整機構であって、パターン形成面の反対側の面に光を照明する下部光源31と、パターン形成面の反対側の面からの反射光を検出して、試料のパターン形成面の反対側の面の高さを測定する位置検出器34と、位置検出器34で測定された試料のパターン形成面の反対側の面の高さと、試料の厚みとに基づいて、対物レンズ13とパターン形成面の相対距離を制御する制御部とを備える。
(もっと読む)
測距方法および装置
【課題】変調光位相差方式により距離を測定する際の誤測距を防止する。
【解決手段】発光部10から一定の周期Tで強度変調された変調光L1が被写体Sに対して射出される。被写体Sから反射した反射変調光L2が受光ユニット20において受光され、第1検出信号α、第2検出信号β、第3検出信号γ、第4検出信号γが各受光素子22a〜22dにより取得されていく。その後、判定部29において第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいか否かが判定され、差分ΔWが設定値Aより小さいとき、4種類の各検出信号α〜γを用いて変調光L1と反射変調光L2との位相差Δφが検出され、この位相差Δφを用いて被写体までの距離dが算出される。一方、差分ΔWが設定値A以上であるブロックBRが存在するとき、位相差Δφの検出が行われず距離演算は行われない。
(もっと読む)
自動焦点調節装置および方法
【課題】2つの映像で焦点を早く合わせ、焦点がよく合わない状況で自主的に補正が可能な自動焦点調節装置および方法を提供する。
【解決手段】自動焦点調節装置は、焦点距離が互いに異なる少なくとも2以上の映像のブラーレベルを計算するブラーレベル計算モジュール210と、ブラーレベル計算モジュールが計算したブラーレベルから焦点距離を計算する距離計算モジュール220と、距離計算モジュールが計算した焦点距離で獲得した映像の焦点が合わない場合、正確な被写体までの距離を計算する精密距離計算モジュール230と、精密距離計算モジュールが計算した正確な被写体までの距離とブラーレベルから距離計算モジュールを補正する距離計算補正モジュール240とを含む。
(もっと読む)
測距装置
【課題】 出力飽和を抑制しつつ、正確な測距が可能な測距装置を提供する。
【解決手段】 測距装置は、変調した光を対象物Hに照射し、対象物Hで反射された光の入射に応答して発生したキャリアを時分割で振り分け、振り分けられたキャリアの電荷量に基づいて、対象物Hまでの距離dを求める測距装置において、振り分けられたキャリアをそれぞれ蓄積する複数のキャパシタC1b,C2bと、キャパシタC1b,C2bに蓄積されたキャリアの電荷量に対応する出力電圧VOUT1,VOUT2のいずれかが、閾値Vthを超えたかどうかを判定する比較器COMP1,COMP2と、出力電圧VOUT1,VOUT2のいずれかが、閾値Vthを超えた旨を、比較器COMP1,COMP2が示す場合には、それぞれのキャパシタC1b,C2bの入力側端子P1,P3を、それぞれのキャパシタC1b,C2bの蓄積電荷量が減少するよう、一定電位VAに接続するスイッチQa,Qbを備えている。
(もっと読む)
測距装置
【課題】 短い検出時間で正確且つ簡単に対象物までの距離を測定可能な測距装置を提供する。
【解決手段】 転送時において、外光の強度が高いほど、転送電圧の大きさを小さくすると、障壁高さが高くなり、より多くの電荷量のキャリアが、第1及び第2ポテンシャル井戸φCD1、φCD2内に残留する。単位期間は、外光の強度に依存しないで設定される。外光の強度が高いほど、多くのキャリアが残留し、最終的に読み出されるキャリアから除去される。外光が強ければ、単位期間当りの転送回数が増加し、第1及び第2ポテンシャル井戸φCD1、φCD2内に蓄積されるキャリアが飽和する前に、転送が行われる。外光が弱ければ、単位期間当りの転送回数が減少し、余分な転送を行わないことで、単位時間当たりの蓄積電荷量を増加させ、短い検出時間において検出精度を向上させることができる。
(もっと読む)
レーザ測距装置およびレーザ測距方法
【課題】信号処理負担を軽くして測距時間を短縮したレーザ測距装置を提供する。特に単位時間当たりの測定密度が多い場合に効果的であるようにする。
【解決手段】計測対象へ向けてレーザ光を送信する送信部1と、前記計測対象で反射されて戻ってきた受信信号21を受信する受信部2と、前記受信部2の出力を分岐して入力する時間計測部3および強度計測部4と、前記時間計測部3が出力する時間計測値△t1に含まれる時間計測誤差を抑制するコンスタントフラクションディスクリミネータと、前記コンスタントフラクションディスクリミネータでの抑制限度を超える時間計測誤差を補正する補正部5と、その補正部5には強度計測部4の計測した強度計測値P1に対する補正量を予め定めて参照自在に記憶した補正テーブルと、を備え、前記強度計測値P1が所定値を超えた時にのみ前記補正部5を作動させる。
(もっと読む)
センサ
【課題】被写体までの距離の計測の精度が悪くなるのを抑制することが可能なセンサを提供する。
【解決手段】このセンサ100は、LED2から照射されて被写体により反射された反射光を検出することにより被写体までの距離を計測するための画素42を備え、画素42は、画素42に蓄積される信号電荷を衝突電離させて増加するための高電界領域422aを含む。
(もっと読む)
測距装置、測距方法及び測距システム
【課題】パルス光を使用して測距する際に、外光成分を除去できるようにして、測距の精度を向上させる。
【解決手段】測距システム10は、基準時から所定のパルス幅を有するパルス光28を出射する発光手段14と、パルス光28により照射された物体からの反射光34を受光し、基準時からパルス幅に相当する期間にわたる第1区間で蓄積した第1電荷量と、第1区間経過時点からパルス幅に相当する期間にわたる第2区間で蓄積した第2電荷量と、第2区間経過時点からパルス幅に相当する期間にわたる第3区間で蓄積した第3電荷量とを得る受光手段16と、受光手段16で得られた第1電荷量、第2電荷量及び第3電荷量に基づいて、物体までの距離を算出する演算手段18とを有する。
(もっと読む)
測距装置及び測距方法
【課題】撮像素子を駆動するための回路も簡単にすることができ、CPUへの負荷を低減することができる測距装置を提供する。
【解決手段】第1測距装置10Aは、一定間隔で同期信号Saを発生する同期信号発生部24と、強度変調された変調光12を、同期信号Saの入力に基づいて出射する発光手段14と、同期信号Saの入力に基づいて、変調光12により照射された被検出物からの反射光18を受光する受光手段20と、変調光12と反射光18の位相差から被検出物までの距離を算出する演算手段22と、同期信号発生部24から受光手段20への同期信号Saの到達時間を同期信号Saの発生回数に応じて変化させる同期信号制御手段64とを有する。受光手段20は、同期信号Saの入力を基準として一定周期ごとに設定された露光期間において反射光18の光量をサンプリングする。
(もっと読む)
撮像装置、その被写体追従方法及びプログラム
【課題】被写体が移動したとしても精度良く被写体の追従を行う。
【解決手段】CPU24は、追従領域を撮像エリア内に設定し、この追従領域に合わせ込まれた被写体2の追従を行う。CPU24は、タイミング信号Stをフラッシュ制御部14,撮像制御部15、センサ部11の素子駆動部102,103に供給して、各部を駆動する。CPU24は、データ処理部20から取得したカラー画像と不揮発性メモリから取得したカラー画像とを比較し、被写体2の位置の変化を検出し、被写体2の移動後の位置データを取得する。また、CPU24は、データ処理部20から取得した距離画像と不揮発性メモリから取得した距離画像とを比較し、被写体2の位置の変化を検出し、移動後の位置データを取得する。CPU24は、最も信頼性の高い位置データを選択し、選択した位置データに基づいて、追従領域を移動させる。
(もっと読む)
1 - 20 / 36
[ Back to top ]