
Fターム[3B150CE03]の内容
Fターム[3B150CE03]に分類される特許
61 - 80 / 367
ベルトループ縫いミシンの制御方法およびベルトループ縫いミシン
【課題】1本針閂止めミシンで縫製物本体にベルトループを縫付る際に、押えでループ材を縫製物に押え後、ループ材の挟持を開放して縫製するまでの時間を短縮し、作業効率を向上するベルトループ縫いミシンの制御方法及びベルトループ縫いミシンを提供する。
【解決手段】一端部が縫製物本体に縫付れたベルトループの他端部に閂止縫いする前に、挟持手段13を設定された閂止め形状サイズに合わせた押えの移動範囲から退避させるベルトループ縫いミシンの制御方法で、X軸方向移動手段XPMのみを駆動させるX軸方向退避方法と、X軸方向移動手段とともにX軸方向移動手段の駆動よりも早く又は同時にY軸方向移動手段YPMを駆動させるY軸方向退避方法のいずれかの方法を選択し、X軸方向移動手段XPMおよび/またはY軸方向移動手段YPMを駆動させ、挟持手段が押えの移動範囲から退避してベルトループの他端部の閂止め縫いを開始する制御を行う。
(もっと読む)
ミシンの布押さえ昇降装置

【課題】電源遮断時の布押さえ高さの固定状態を解消する。
【解決手段】布押さえ5を昇降するエアシリンダ4と、空気圧供給源20からエアシリンダの各空気室4U,4Dへ空気圧を供給する第一の電磁弁10と、布押さえを操作する操作入力手段30と、第一の電磁弁を制御して布押さえの高さを切り換え、下降時間の長さにより布押さえを中間停止させる制御手段40と、エアシリンダの各空気室に設けられた予備排気経路71,72と、各予備排気経路に設けられた逆止弁73aと、各逆止弁に空気圧を供給する閉塞圧供給経路74と、各逆止弁の排気側に対する空気圧供給状態と大気解放状態とを切り換え可能な第二の電磁弁75と、主電源の通電時には空気圧供給状態とし、主電源の切断時には大気解放状態に第二の電磁弁を切り替える押さえ解放制御回路77を備えている。
(もっと読む)
ミシン
【課題】操作パネルに表示される操作設定の有効と無効の切り替えの手間を軽減する。
【解決手段】表示部52に表示される画面毎に、入力部51による入力の有効又は無効に連動させる入力部群を記憶する入力部群記憶手段62と、表示部に表示される互いの画面間で入力部による入力の有効又は無効に連動させる入力部群を有する画面群を記憶する画面群記憶手段62と、を備え、制御手段6は、操作条件が第1の条件を満たす場合に、ユーザーにより押下された入力部による入力を有効又は無効に切り替え、第2の条件を満たす場合に、ユーザーにより押下された入力部と同じ群の入力部による入力を有効又は無効に切り替え、第3の条件を満たす場合に、ユーザーにより押下された入力部を含む入力部群を有する各画面の入力部と同じ群の入力部による入力を有効又は無効に切り替えるように連動させる。
(もっと読む)
ミシン
【課題】中間位置の設定を容易に行うことができ、作業効率を向上すること。
【解決手段】布押さえ機構と、押さえモータ11と、操作ペダル70と、制御手段100と、を備えるミシン1において、布押さえを下降させる場合に、当該布押さえが被縫製物に当接して下降が停止したときの検出手段(12)によって検出された押さえモータの駆動量に応じた布押さえの下降量と、下降前の布押さえの針板からの初期高さとから被縫製物の厚さを算出する布厚算出手段(100)と、算出された布厚に加算する補正値を記憶する補正値記憶手段(104)と、算出された布厚に補正値を加算して中間位置を算出する中間位置算出手段(100)と、算出された中間位置を記憶する中間位置記憶手段(104)と、を備え、制御手段は、中間位置の算出後、布押さえで被縫製物を押さえた状態から布押さえを上昇させる際に、記憶された中間位置で布押さえの上昇を停止させる。
(もっと読む)
ミシン
【課題】縫製枠の歪みを防止して縫製枠を高精度に位置決めすることができるミシンを提供することであり、特に、縫製枠の長辺の歪みを防止して縫製枠を高精度に位置決めすることができるミシンを提供する。
【解決手段】縫製枠50を前後方向に駆動する前後方向駆動部70は、ボールネジ86、106と、モータ84、104と、移動部材87、107とを有し、移動部材87の係合ローラ92が縫製枠の長辺部52に係合し、移動部材107の係合ローラ112が長辺部54に係合する。ボールネジ86とボールネジ106とは連結部材124により連結されている。縫製枠50において、長辺部が短辺部に対して前後方向にスライドし、連結部材124の中間位置にクラッチを設けるようにしてもよい。
(もっと読む)
ミシン
【課題】
複数のミシン針をそれぞれ独立して往復動させ、各ミシン針によって形成される縫い目の形状を異ならせることができるミシンを提供する。
【解決手段】
ミシン本体2の駆動装置によって往復動する針棒41の先部には、ガイド部材51が固定されている。ガイド部材51には、ミシン針71を固定した複数の取付部材61A〜61Cを縫製方向Xと略直角の方向Yに案内する案内部52が形成されている。各取付部材61A〜61Cは、ミシン本体2に設けられた複数の動作手段A〜Cにそれぞれ連結部材80A〜80Cによって連結され、各動作手段A〜Cの作動により各ミシン針71を縫製方向Xと略直角の方向Yに往復動するように構成されている。
(もっと読む)
玉縁縫いミシンのコーナーメス機構
【課題】必要に応じたコーナーメスを容易に選択可能とする。
【解決手段】鉛直軸回りに取付角度が異なるものを含む複数のコーナーメス101〜104を有し、これらのコーナーメスを左右方向に沿って並べて保持するコーナーメス保持体105と、コーナーメス保持体を左右方向に沿って移動させるメス選択用アクチュエータ121と、各コーナーメスを昇降させる切断用アクチュエータ131,132と、各コーナーメスについて、布送り方向を基準に向きが対称で取付角度が等しいコーナーメスの組合せの中から、いずれか一つの組合せを選択してコーナー切れ目を形成する動作制御手段とを備えることを特徴としている。
(もっと読む)
ミシン
【課題】張りポケットやパッチの縫製の時に、針糸を簡単に切り換える可能なミシンの提供。
【解決手段】本発明に係るミシンは、クローシェを備えたベースと、ニードル支持体30、布地押さえ脚部24、その調節手段26、前記クローシェと共にニードルに縫い動作をさせるモータ手段、及び前記駆動手段の回転運動を上下方向の往復運動に変換するレバー手段32とを備えたヘッド14とを備えている。前記ニードル支持体30は、前記レバー手段32によって上下方向に動かされる少なくとも2つのニードルバー46と、前記レバー手段32を少なくとも1つのニードルバー46と組み合わせる連結エレメントと、を備えている。各ニードルバー46は、各々の糸を通したニードル16,18に組み合わされ、縫い動作を許容するために前記クローシェ内で選択的に駆動される。
(もっと読む)
シークイン供給装置
【課題】 2台の送りユニットを短時間に切り替え、一方の送りユニットからサイズが異なる複数種のシークインを供給する。
【解決手段】 シークインS1のサイズが異なる複数種のテープT1を送り出す第1送りユニット21Rと、一種類のテープT2を送り出す第2送りユニット21Lと、2台の送りユニットを切り替える切替機構とを設ける。第1送りユニット21Rに、先頭シークインを切り離すカッター38Rと、シークインサイズに応じカッター38Rを針8に対して位置調整するネジ76とを設ける。第2送りユニット21Lのカッター38Lを針8に対し定位置に設ける。第1送りユニット21Rのテープ案内通路をシークインサイズに応じて幅調整可能に設ける。第2送りユニット21Lのテープ案内通路を第1送りユニット21Rの最大通路幅よりも狭く形成する。
(もっと読む)
縁かがり縫いミシン
【課題】カギルーパを構成した際には十分な糸の係止部を確保し、カギルーパを構成しない場合には、糸の通過を邪魔することがない十分な距離を確保すること。
【解決手段】上ルーパ(10)の先端近傍の上縁に形成された係合穴(10b)と、係合穴との係合により糸を係止可能とする係合部(30a)を有し上ルーパに支持された係合爪(30)と、係合部が係合穴に係合する位置と係合穴から離脱する位置との間で当該係合爪を上ルーパの上下方向に沿って移動自在に案内するガイド手段(21,40)と、係合爪を係合穴から離脱するように当該上ルーパの上方に向けて付勢する付勢手段(41)と、係合爪をガイド手段に案内させて移動させることにより、付勢手段の付勢力に抗して係合部を係合穴に係合させた状態と、係合部が係合穴から離脱させた状態とで係合爪を保持可能とした操作手段(50)と、を備える。
(もっと読む)
多頭式ミシン
【課題】 複数のミシンに設置した作動装置の動作/停止を流体圧アクチュエータで切り替える多頭式ミシンにおいて、アクチュエータの出力軸を機械的手段で係止/解除し、アクチュエータを制御するためのバルブを不要にする。
【解決手段】 複数の刺繍ミシンに上糸送り装置31と、その動作/停止を切り替えるエアシリンダ62とを設ける。エアシリンダ62にソレノイド63を付設し、ソレノイド63のプランジャ77にストッパ78を設ける。エアシリンダ62の出力軸73をカップリング70で上糸送り装置31に結合する。ストッパ78が係止される係止溝71をカップリング70に設け、カップリング70を案内部材69で直進案内する。ソレノイド63を消勢し、エアシリンダ62の付勢状態で出力軸73をストッパ78によって係止し、一部の刺繍ミシンで上糸送り装置31の動作を停止させる。
(もっと読む)
ミシン
【課題】ユーザが加工布の縫始めの位置合せを行う際に、面倒な準備作業を行わずに済むと共に、位置合せの作業を容易且つ確実に行う。
【解決手段】ミシンの制御装置は、ユーザにより針上下位置切替スイッチが操作されたとき、或いはフリーモーションモードが設定されたときに、位置合せ準備動作を実行させる。位置合せ準備動作においては、まず送り歯状態切替機構により送り歯の状態を非作用位置に切替えた上で、押え足昇降機構を制御して、押え足8を加工布Wに当接する押圧位置まで下降させ、その際の高さ位置検出器の検出信号から加工布Wの布厚を検出する。次いで、検出された布厚に基づいて、押え足8を加工布Wの上面から例えば1mmだけ上昇させた浮上り位置に停止させると共に、ミシンモータを制御し、針棒6を縫針7の先端部が加工布Wに刺さる直前(例えば1mmだけ上)の設定位置に移動させる。
(もっと読む)
ミシンの縫製データ編集装置
【課題】表示パラメータの設定作業負担を軽減する。
【解決手段】縫製データを編集する縫製データ編集手段20と、縫製データの各針落ち位置の描画表示を行う表示部22と、表示パラメータに従って行わせる表示制御部101と、表示パラメータの設定入力を各項目ごとに個別に行う入力部20と、現在設定されている設定項目の内容で表示パラメータを記憶させる記憶指示部20と、その際の表示パラメータを記憶可能な記憶部104と、記憶された表示パラメータの再現を実行させる再現指示部20とを備え、表示制御部は、再現指示部から再現の実行が入力されると、記憶指示部の指示で記憶された表示パラメータに従って表示状態を切り替える表示制御を行う。
(もっと読む)
多頭式ミシン
【課題】 多頭式ミシンにおいて、シークイン供給装置の調整・点検・キャンセル等のメンテナンス作業を各ミシンの前で容易に行えるようにする。
【解決手段】 機枠2に複数台の刺繍ミシン3を並設し、各ミシン3にシークイン供給装置7を付設する。各シークイン供給装置7に、シークインを連ねたテープの送出用アクチュエータと、供給機構の位置を切り替える昇降用アクチュエータと、供給機構を休止位置に待機させるキャンセル用アクチュエータとを設ける。送出用アクチュエータと昇降用アクチュエータを各ミシン3に共通のコントローラ11で自動制御する。送出用アクチュエータ、昇降用アクチュエータ、キャンセル用アクチュエータをミシン毎に別々に動作させるためのスイッチ69,71を各ミシン3のテンション台5に設ける。
(もっと読む)
ミシン
【課題】 通常の縫製をすることができるは勿論、縫製中において目とびすることができるミシンを提供しようとするものである。さらに、目とびをさせながら縫製する場合、係合爪と針棒の掛合部との離脱、係合を正確にして縫製することができるミシンを提供しようとするものである。
【解決手段】 上記作動部材とフレームの間には作動部材戻しばねを備えさせ、その作動部材戻しばねと作動部材との構成は、上記ソレノイドに通電して作動部材が係合爪を係合位置から退避位置に向けて駆動する過程において、係合位置から係合爪が離脱する点付近では、ばね力が作動部材に及ばないか、又は比較的弱く作用するようにし、上記離脱点付近から退避位置においては、ばね力は比較的強く作動部材に及び、作動部材の移動により作動部材戻しばねに対して反発力が大きく蓄積されるようにした。
(もっと読む)
玉縁縫いミシン
【課題】生地厚に対応して円滑に玉縁布の折込動作を行うことができる玉縁縫いミシンを提供する。
【解決手段】底板部および立板部に身生地の上に載置された玉縁布を沿わせるバインダと、前記バインダの立板部の両側における前記底板部の上方位置と、前期底板部から側方に離間する初期位置に配置される一対の折込板3、および、当該各折込板を上方位置と初期位置に移動する各折込駆動手段26を有し、各折込板が対応する各折込駆動手段により前記初期位置から前記上方位置に移動し、前記各折込板の先端部が、当該底板部の左右両端から延出する玉縁布の両端部を前記底板部の上面側に折り返して玉縁布を折り込む折込装置2とを備えた玉縁縫いミシンにおいて、前記玉縁布および玉縁布の生地厚を検出する生地厚検出手段と、前記生地厚検出手段により検出される生地厚に基づいて、前記折込板を上下動駆動する手段28を備える。
(もっと読む)
サージングマシン
【課題】生地の縫製の仕方に応じて効率よく縫製を行うこと。
【解決手段】縫製を行うミシン本体と、被縫製物が載置されるテーブル(2)と、ミシン本体の駆動を制御する制御手段(3)と、を備えるサージングマシン(10)において、テーブルは、ミシン本体が設けられる主テーブル(21)と、当該主テーブルに連結自在の補助テーブル(22)と、主テーブルと補助テーブルを連結する連結部材(23)と、を備え、主テーブル又は補助テーブルには、両テーブルが連結されているか否かを検出する検出手段(6)が設けられ、制御手段は、検出手段の検出の有無によって単独縫いモードとサイクル縫いモードとに縫製動作を変更する。
(もっと読む)
ミシン
【課題】入力操作が容易なミシンを提供する。
【解決手段】ミシン1は、縫い針8aを支持して上下動する針棒8と、被縫製物を保持して移動可能な布移動機構10と、針落ち位置の運針経路Lを表示すると共に針落ち位置の運針経路L上の形状点Kを入力可能な操作パネル20と、形状点Kの入力に追従して布移動機構10の布保持枠12を移動させるCPU101と、縫製データを記憶するEEPROM104と、運針経路L上の形状点Kを入力可能な外部コントローラ25と、外部コントローラ25を着脱可能に接続するUSBポート23及びUSB端子25aと、を備える。
(もっと読む)
ミシンの返し縫い制御装置
【課題】 縫製開始前に、始め自動返し縫い制御およびソフトスタート制御がともに有効として設定されている場合に、最適な縫い目を形成するべく縫い目補正値α、βを設定する最適化制御への支障を自動的に判別して、二重設定や設定解除忘れ等によって前記最適化制御が崩れることによる縫い目ズレやピッチの不揃い(詰まり)の発生を防止して、縫い品質を良好なものとすることができるミシンの返し縫い制御装置を提供する。
【解決手段】 ソフトスタート制御と始め自動返し縫い制御がともに有効設定されている場合に、ソフトスタート制御を実行した場合の始め自動返し縫い制御への支障の有無を判断し、支障があると判断した場合には、前記ソフトスタート制御の非実行を決定し、始め自動返し縫い制御のみを実行する制御を行なう。
(もっと読む)
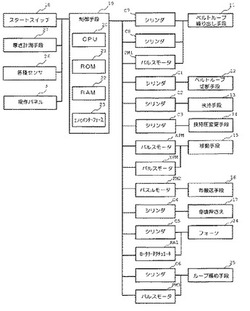
ミシンの手元入力装置
【課題】 効率的に、余分な電力の消費を削減する。
【解決手段】 制御手段11は、省略モードが動作していない状態において、加速度センサ10が縫製動作による振動を感知した場合には、省略モードを開始し、縫製動作による振動を感知しない場合には、省略モードが動作していない状態を維持し、省略モードが動作している状態において、加速度センサ10が手持ち操作による振動を感知した場合には、省電力モードを停止し、手持ち操作による振動を感知しない場合には、タッチパネル7が操作されたか否かを判別し、操作されたと判断した場合には、省略モードを停止し、操作されていないと判断した場合には、省略モードを維持する。
(もっと読む)
61 - 80 / 367
[ Back to top ]