
Fターム[3C007AS02]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 搬送、移載、物品供給、取出 (637) | パレタイズ、デパレタイズ (36)
Fターム[3C007AS02]に分類される特許
1 - 20 / 36
荷姿認識装置
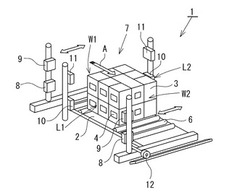
【課題】自動車の組立部品の納入等の物流工程において、パレット上に積載された箱体の種類、形状、寸法及び位置等の荷姿情報を自動的に認識する荷姿認識装置を提供する。
【解決手段】走査装置7の可動ラインカメラ8及び固定ラインカメラ10により、パレット2上に積載された箱体3の第1面〜第4面W1、W2、L1、L2について走査する。走査データから、箱体3に貼り付けられた帳票4の2次元コードを抽出し、2次元コードの位置を表す座標データを生成し、また、抽出した2次元コードに基づきデータベースから箱体3の形状、寸法及び2次元コードの表示位置を含む箱体情報を取得し、2次元コードの位置を表す座標データ及び箱体情報に基づき、パレット2上に積載された箱体3の荷姿情報として、箱体3の各部の座標データを生成する。
(もっと読む)
立体視ロボットピッキング装置

【課題】カメラとワークの間隔が長くなるのを抑制し、ステレオ方式でワークの3次元位置を算出しロボットの吸引部の配置位置を決める立体視ロボットピッキング装置を提供する。
【解決手段】コンテナ11内のワーク12を順次ロボット13によって別位置に移動する立体視ロボットピッキング装置10において、ワーク取出し位置18までコンテナ11を送る移動手段14と、ワーク取出し位置18にあるコンテナ11全体を撮像するカメラ15と、ワーク取出し位置18にあるコンテナ11を部分的に撮像するカメラ16と、カメラ15、16が撮像した各画像中のワーク12をパターンマッチングによって検出して、各画像中でのワーク12の2次元位置を算出する画像処理手段23とを有し、カメラ15、16は、コンテナ11の移動方向に沿って配置され、画像処理手段23は、カメラ15、16の各画像中のワーク12の2次元位置からワーク12の3次元位置を算出する。
(もっと読む)
デパレタイズロボットのロボットハンド
【課題】平面視長方形である複数の移載物を同一平面に並べた積載位置から搬出位置へ前記移載物を移し替えるデパレタイズロボットのロボットハンドを提供する。
【解決手段】移載物3の厚みより長い抱え込み爪22,22を、移載物3の一辺より長い間隔で前後一対配し、各抱え込み爪22の下端部に抱え込みロッド23を架け渡して抱え込み枠21を構成し、互いの抱え込みロッド23を平行にし、鉛直線に対して左右対称に対向させた左右一対の抱え込み枠21,21それぞれを、各抱え込み爪22の上端部に設けた揺動軸226を本体部24に軸着して前記本体部24に支持させ、前記抱え込みロッド23,23が平行を保ったまま各抱え込み枠21を揺動させるエアシリンダ26を本体部24に設けたデパレタイズロボット1のロボットハンド2である。
(もっと読む)
ロボット制御装置及びロボットの制御方法
【課題】仕切り板の配置にずれがあるパレットについても、手先との干渉を極力回避しながら作業を継続できるロボット制御装置を提供する。
【解決手段】ロボットの手先がパレットのマスの内部に挿入されると距離センサで検出される距離から周辺を囲む仕切り板の正規位置からのズレ量を検出し(S8)、パレットの外枠部分は予めフラグ「OK」を設定し(S1)、ズレ量が「ゼロ」,「マイナス」なら(S9:YES)当該仕切り板に隣接するマス側にフラグ「OK」を(S10)、ズレ量が「プラス」なら(S9:NO)当該仕切り板に隣接するマス側にフラグ「NG」を設定する(S11)。各マスのうちフラグ「NG」の設定がないものにつきフラグ「OK」の数を計算し(S2)、フラグ「OK」の数が「2」以上で最大のマスからワーク3の取出しを行ない(S6)、「2」以上のマスが存在しなければ(S4:NO)ワーク3の取出しを中止する。
(もっと読む)
ロボットハンド及びそれを用いたパレタイジング装置
【課題】粒状物を充填した不定形袋のパレタイジングにおいて、高い積載効率を確保するとともに荷崩れを起こしにくい積付け山を形成できるようにする。
【解決手段】パレタイジング装置のロボットアーム先端側に取り付けられて不定形袋50をワーク支持手段12で支持しながら積載スペース内に積付けてパレタイジングを行うロボットハンド10であって、そのワーク支持手段12は横向きにした不定形袋50を下から支えて持ち上げるための複数本のフォーク12a,12b,12c,12dをロボットハンド前面下端側から前方に突出した状態で横方向に並列して有しており、両端のフォーク12a,12dの間で少なくとも1本以上のフォーク12b,12cが上面を両端のフォーク12a,12d上面よりも高い位置で設けられて正面視山形のフォーク配置とされており、不定形袋50を中央部が弧状に持ち上がった状態で支持しながら積付けを行うものとした。
(もっと読む)
ワーク段積み状態認識装置
【課題】簡単な設備でワークの段積み状態を正確に認識することができるワーク段積み状態認識装置を提供する。
【解決手段】ワーク段積み状態認識装置1は、ワーク群Wの上方位置から下方を撮像するカメラ装置2と、ワーク群Wの側面に対向して配置されてカメラ装置2に向かってワーク群Wの側面を映す鏡面体6と、カメラ装置2で撮像した画像に基づいてワーク群Wのワーク段積み状態を認識する認識部3を有しており、ワーク群Wの側面を鏡面体6に映して上面と共に上方から撮像することにより、ワークwaの立体形状を正確に認識する。
(もっと読む)
トレイ移載装置及び方法
【課題】(1)ロボットによる多品種少量生産を効率的に行うことができ、(2)供給装置を簡略化し設置スペースを小さくでき、(3)トレイが傾いて供給されたことを検知することができ、(4)トレイが傾いていてもワークを正しく把持することができるトレイ移載装置及び方法を提供する。
【解決手段】複数の積載スペースa,b,cにそれぞれ段積み可能な複数のトレイ10と、トレイに設けられたトレイ把持部11とトレイ上に積載されたワーク1を把持可能なハンド12と、ハンドに取り付けられトレイをその上方から撮影するカメラ14と、ハンドを3次元的に移動可能なロボット16と、カメラで撮影した画像を画像処理してロボットを制御するロボット制御装置20とを備える。移載先の積載スペースの上方から撮影した画像5に基づき、トレイの傾き角度を計測し(S24)、これに基づきロボットのベース座標を較正し(S25)、トレイ上のワークを移載する。
(もっと読む)
パレタイズ装置
【課題】爪を有するハンド部でワークを把持し移動させてパレット上に整列積載するパレタイズ装置において、ワークの整列時にハンド部を引き抜く動作を不要として高速にパレタイズ可能とする。
【解決手段】本装置は、ワークWを把持するハンド部2と、ハンド部2を移動させ、ワークWを順次搬送してパレット7に整列して積載するアーム部3と、を備え、ハンド部2は、ワークWを把持する長爪21および退避爪22と、退避爪22を退避させる退避機構と、を備えている。アーム部3は、爪21,22によってワークWを把持したハンド部2を移動させてワークWをパレット7上に移動させ、ハンド部2がワークWを整列させる方向x1の前方側にある退避爪22を退避機構によって退避させ、前記方向x1の後方側にある長爪21によってワークWを押してワークWを整列させる。整列時に退避爪22が退避するので、ハンド部2を引き抜く必要がない。
(もっと読む)
搬送装置及び搬送方法
【課題】収容物の出し入れを行う面を下側とし、その面のフラップの封止を行うことなく、かつ、収容物の脱落を防止しつつ箱体を搬送する。
【解決手段】開閉自在な左右一対のフラップ201を底面に有する箱体200の搬送装置であって、前記箱体200を保持する保持ユニット10と、保持ユニット移動手段とを備え、前記保持ユニット10は、前記箱体200の上面又は側面において前記箱体200を保持し、前記箱体200を昇降させる昇降手段11と、前記一対のフラップ201のそれぞれに当接し前記フラップ201の開放を規制する一対の当接部材14と、前記一対の当接部材14が前記箱体の下方において互いに近接して前記フラップ201の開放を規制する開放規制位置と、前記一対の当接部材が前記箱体の下方において互いに離間して前記フラップの開放を許容する開放許容位置と、の間で前記一対の当接部材を移動させる当接部材開閉作動手段12とを備えた。
(もっと読む)
双腕ロボット及びそのハンドリング方法
【課題】双腕ロボット及びそのハンドリング方法において、パレタイズ時にワークを適切な位置に整列積載する。
【解決手段】双腕ロボットは、左右一対で構成されたワークを保持する第1ハンド部2a及び第2ハンド部2bと、制御部とを備える。両ハンド部2a、2bは、それぞれ長爪21と可動する短爪22とを有する。両ハンド部2a、2bによってワークWaを保持しているとき、制御部は、先に第1ハンド部2aを退避させ、ワークWaの第1ハンド部2a側の隅部を降下させる。次に、制御部は、第2ハンド部2bを退避させ、ワークWaの第2ハンド部2b側の隅部を降下させ、ワークWaをワークWb上に積載する。これにより、先の第1ハンド部2aの退避時においても、またその後の第2ハンド部2bの退避時においても、各ハンド部の摩擦力が動摩擦となり、それぞれの動作時にワークがハンド部に引っ張られることがなくなる。
(もっと読む)
双腕ロボット及びそのハンドリング方法
【課題】双腕ロボット及びそのハンドリング方法において、パレタイズ時にワークを歪むことなく保持する。
【解決手段】双腕ロボットは、左右一対で構成されたワークを保持する第1ハンド部2a及び第2ハンド部2bと、制御部とを備える。両ハンド部2a、2bは、それぞれ長爪21と可動する短爪22とを有する。ワークWがストッパ91によって位置決めされているとき、制御部は、両ハンド部2a、2bを移動させて両爪21、22の間にワークWを位置させる。そして、両ハンド部2a、2bを距離m1だけ移動させることにより、ワークWを押し動かしてワークWとストッパ91との間にクリアランスCを生じさせる。これにより、その後、両ハンド部2a、2bの短爪22を可動させても、ワークWがストッパ91に押し付けられて歪むことがなくなり、ワークWを長爪21に押し付けて保持することができる。
(もっと読む)
段積み部品取出し装置
【課題】段積みされた部品を効率良く取出す装置を提供する。
【解決手段】平面上で位置決めできる本体と、本体に取り付けられたアクチュエータ62と、該アクチュエータ62により駆動されて上昇端位置α1と下降端位置の2ポイントの位置で上下動する上下本体63と、該上下本体63に自重で上下動できるように貫通状態で設置された自重上下軸41と、該自重上下軸41がその下降端位置にあることを検出するセンサPH1とを具備する段積み部品取出し装置において、前記自重上下軸41の上端部には、自重で下降することを停止させる自重軸ストッパ45が設けられ、前記自重上下軸41の下端部には、部品を把持するチャック21と、前記自重上下軸41を部品上面で停止させるためのストッパ51が設けられていることを特徴とする。
(もっと読む)
ピッキング装置と方法
【課題】物品が存在しないはずの位置において物品が存在すると誤認識することを防止するとともに、画像処理時間を短縮する。
【解決手段】取出位置にある物品1を把持して取り出すピッキング装置10であって、取出位置にある物品1を上方から撮像することで、物品1を含む領域の画像データを取得する撮像装置3と、画像データ内に物品1が存在するべき物品存在画像領域を、入力された物品1の高さに基づいて、画像データから抽出する画像領域抽出装置7と、物品存在画像領域に対して画像処理を行うことで、物品1の認識データを取得する画像処理装置9と、認識データに基づいて、物品1を把持して取り出す取出装置11と、を備える。
(もっと読む)
パレタイズ装置
【課題】パレタイズ装置において、簡単な構成により、ワークやパレットに寸法ばらつきがあっても、パレタイズ時のワーク間の干渉やパレタイズされたワーク間の隙間の発生を防止して柔軟に、且つ高速にパレタイズ可能とする。
【解決手段】本装置1は、ワークを把持するハンド部2と、ハンド部2を移動させるアーム部3と、積載したワークの位置情報を取得する計測部5と、前記情報を記憶する記憶部6と、各部の動作を制御する制御部10と、を備えている。制御部10は、ワークを把持したハンド部2を移動させてパレットにワークを積載した際に、計測部5によってそのワークの積載位置を取得して記憶部6に記憶させ、次のワークをパレットに積載する際に、記憶部6に記憶されている積載位置に基づいて、ワークの積載予定位置を決定する。既積載ワークの積載位置を基準にするので、ワークやパレットの寸法変動に対応でき干渉や隙間の発生を防止できる。
(もっと読む)
デパレタイズ用のワーク位置認識装置および方法
【課題】ワーク上面の輪郭データに基づく誤検出を大幅に低減することができ、ワークの形状、模様及び画像の鮮明度の影響を低減して認識精度を高め、常に高い精度とワークの位置と姿勢を検出することができるデパレタイズ用のワーク位置認識装置および方法を提供する。
【解決手段】撮影装置12により、複数の同一ワーク1が同一平面上に並んだ画像3を撮影し、画像処理装置14により、画像3から輪郭データ5を取得し、輪郭データ5から各ワークの位置及び姿勢を検出し、画像中のワーク部分の画像をマスタ画像パターン6として登録し、マスタ画像パターンと各ワーク部分の画像とのパターンマッチングを行い、すべてのワーク部分に対しパターンマッチングが成功した場合に、各ワークの位置及び姿勢を出力する。
(もっと読む)
デパレタイズ装置および方法
【課題】第1位置において、複数のワークの位置と姿勢がランダムである場合でも、複数のワークを同時または集中して搬送することができ、第2位置において、ワークの向きを整列させることができ、ワークに吸着しにくい箇所があっても、効率よくワークを移載することができるデパレタイズ装置および方法を提供する。
【解決手段】1又は2以上の第1位置2にランダムに位置する複数の同一ワーク1を1又は2以上の第2位置4に移載するデパレタイズ装置10。第1位置において複数のワークを上方から撮像する撮像装置12と、撮像した画像から各ワークの上面位置と向きを検出する画像処理装置14と、ワークの上面を吊り上げ可能に吸着するロボットハンド20を有する搬送ロボット16と、搬送ロボットを制御する制御装置18とを備える。ロボットハンド20は、その下面に複数のワークを同時に吸着可能でありかつそれぞれ独立に吸着力を制御可能な複数の吸着部21を有する。
(もっと読む)
パレタイズロボット用ハンドとこれを用いたパレタイズ方法
【課題】小型で軽量なハンド部のままで積載時の枠部乗り上げ等の異常状態を検知できるパレタイズロボット用ハンドを提供する。
【解決手段】ワーク1の上部を把持し、パレット2上の所定の枠内に移載するためのパレタイズロボット用ハンドであって、ワークの上部を把持する把持装置16と、把持装置を所定の距離内で上下動可能に吊り下げ、パレタイズロボットのハンド取付部10に取付けられた吊り下げフレーム20と、吊り下げフレームに対する把持装置の上下動及び傾動を検出する着地状態検出装置30とを備える。
(もっと読む)
保持搬送装置
【課題】種々の重量や形状を有する物品を、塑性変形や破損を起こさせることなく、且つ充分な吸引力によって安定して保持して搬送することが可能な保持搬送装置を提供する。
【解決手段】本発明の保持搬送装置1は、複数の吸引孔を有する物品吸着面が設けられた吸引ヘッド2と、吸引ヘッド2の吸引室9に連結された負圧供給手段4とを備えている。この負圧供給手段4は、吸引ヘッド2が物品吸着面に物品を当接させて物品を吸引保持する際に、前記物品吸着面のほぼ全領域に前記物品が配置されて大多数の吸引孔から外気を直接吸引しない状態で前記物品をほとんど塑性変形させることなく吸引保持することができ、且つ、前記物品吸着面に物品が当接していない領域が広く前記物品に当接していない多くの吸引孔から外気を直接吸引する状態でも物品の吸引保持を維持できるような負圧を吸引ヘッド2にもたらすことができるよう広い風量の領域に対して低くフラットな吸込み側静圧特性を有している。
(もっと読む)
積付装置および積付方法
【課題】適切な積付作業ができる積付装置を提供する。
【解決手段】積付装置1は、回動部10を有する装置本体4を備える。回動部10にはベース体12を回動可能に設ける。ベース体12には、物品Wを両側方から挟持する固定挟持体23および可動挟持体31を設ける。ベース体12には、物品Wの下面を支持する下面支持体41を移動可能に設ける。積付作業時には、保持物品Wを積付物品Wの上方位置に平面視で保持物品Wが積付物品Wに対して傾斜した状態でかつ保持物品Wの一角部と積付物品Wの一角部とが平面視で一致した状態になるように位置させる。次いで保持物品Wの一部のみを積付物品W上に載せた後、平面視で保持物品Wの積付物品Wに対する傾斜をなくし、その後、下面支持体を移動させて保持物品を積付物品上に互いに嵌合した状態に積み付ける。
(もっと読む)
ワインダー用コアの移載装置
【課題】ワインダー用コアを、X軸、Y軸又はZ軸を組み合わせた2軸方向又は3軸方向に移動させて、ワインダー装置に移載することができるワインダー用コアの移載装置を提供する。
【解決手段】コアwが収容された容器99に臨む位置に設けた、容器のコアを取り出す開口部の位置よりも高さを有する基体1と、この基体の上部に基端部が回動可能に連結された細長状の上腕部2と、この上腕部の先端部に基端部が回動可能に連結された細長状の前腕部3と、この前腕部に垂設されて、上記コアを吸着可能なハンドリング部4とを有し、かつ上記上腕部を駆動させる上腕駆動手段5と、上記前腕部を駆動させる前腕駆動手段とをそれぞれ上記基体の上部に設けた円筒状のコアをワインダー装置に移載するワインダー用コアの移載装置とした。
(もっと読む)
1 - 20 / 36
[ Back to top ]