
Fターム[3C007AS31]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 高圧/真空環境用 (44)
Fターム[3C007AS31]に分類される特許
1 - 20 / 44
真空処理装置、電子部品の製造方法及び真空処理プログラム
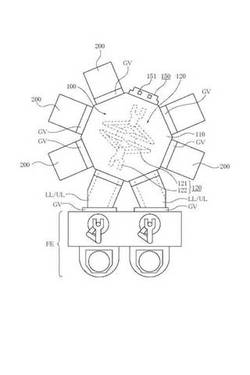
【課題】 基板搬送用ロボットのフィンガーの変形を精度よく検出する。
【解決手段】 基板を保持可能なフィンガーを有した基板搬送用のロボット、及び、前記ロボットにより基板を搬出入させるための基板搬送口を備えた搬送チャンバと、前記基板搬送口に着脱可能に接続され、前記搬送チャンバ内部に連通する開口を有し、外部に対して密閉された内部空間を形成する筐体、及び、前記内部空間に挿入される前記フィンガーの変形を検出するための変位センサを備えたセンシングポートと、前記搬送チャンバに設けられる排気口を介して、前記搬送チャンバ及び前記筐体内部を排気する排気手段と、前記排気手段により前記搬送チャンバ及び筐体内部を減圧させた状態で、前記筐体の内部空間に挿入されたフィンガーの形状の前記変位センサによる検出結果を取得する制御手段と、を備える。
(もっと読む)
真空処理装置

【課題】真空処理装置において、試料の位置ずれが発生した際にそのずれ量を抑制し、予期しない搬送動作の停止を防ぐ。
【解決手段】試料の搬送を行う真空搬送室において、ロボットによる前記搬送の動作中に生じるアーム上に載せられたウエハの加速度はアームの伸長の開始または収縮の終了の際の加速度が最大であって、搬送中の試料の位置ずれを検出し、そのずれ量が所定の閾値(許容値)を超えた場合に、ロボットのアームの伸長の開始または収縮の終了の際の加速度をA‘からAに低下させてずれ量が閾値を超えないようにする。
(もっと読む)
アクチュエータ及び基板搬送ロボット
【課題】 内軸用のマグネットと外軸用のマグネットとを一体とすることで、低コストのアクチュエータを提供すること。
【解決手段】 アクチュエータは、中空構造を有し、中空構造の内側を真空排気可能に構成され、中空構造の外周側で第1コイル部を保持するハウジングと、ハウジングの内部において回転自在に支持され、外周に第2コイル部を有する内軸と、内軸の回転軸と同軸にハウジングの内部において回転自在に支持されており、内軸の外周側を囲むように配置されている円筒状の外軸と、外軸の外周側で第1コイル部に対向し、外軸の内周側で第2コイル部に対向する磁石と、内軸とハウジングの一方に設けられた整流子と、内軸とハウジングの他方に設けられ、内軸が少なくとも回転する際には整流子と摺接するブラシと、を備え、第2コイル部は、整流子とブラシを介して給電される。
(もっと読む)
アクチュエータ及び基板搬送ロボット
【課題】 駆動機構の高さをコンパクトにしたアクチュエータを提供すること。
【解決手段】 アクチュエータは、第1ロータと、第1ステータと、第2ロータと、第2ステータとを備える。第1ロータの回転軸を基準として、第1ロータおよび第2ロータは同心円状に配置され、第1ロータの回転軸を基準として、第1ステータおよび第2ステータは同心円状に配置されている。
(もっと読む)
アクチュエータ及び基板搬送ロボット
【課題】 駆動機構の高さをコンパクトにしたアクチュエータを提供すること。
【解決手段】 アクチュエータは、第1ロータと、第2ロータと、ステータとを有する。第1ロータの回転軸を基準として、第1ロータおよび第2ロータおよびステータは同心円状に配置される。ステータは第1ロータと第2ロータとの間に配置されており、第1ロータと対向する第1コイルと、第2ロータと対向する第2コイルと、を有する。
(もっと読む)
搬送装置及び真空装置
【課題】搬送物や周囲の雰囲気温度が比較的低い環境下においても当該温度が高い環境下においても搬送物を確実に保持して高速搬送を図るとともに、搬送物の搬送時におけるダストをできるだけ少なくする技術を提供する。
【解決手段】本発明の搬送装置50は、駆動源からの動力が伝達される複数のアームを有する伸縮自在なリンク機構20と、リンク機構20の動作先端部において第3の左アーム3L、第3の右アーム3Rを介して連結され基板10を載置するための載置部5とを備える。載置部5の基板搬送方向下流側の部位に、リンク機構20の動作に伴い、基板10の側部と当接して基板10をリンク機構20に向かう方向へ付勢する下流側付勢機構7が設けられ、載置部5の基板搬送方向上流側の部位に、リンク機構20の動作に伴い、基板10の側部と当接して基板10を基板搬送方向へ付勢する上流側付勢機構9が設けられている。
(もっと読む)
アーム機構およびそれを備えた真空ロボット
【課題】高剛性で耐熱性もある真空環境内に適した真空ロボットのアーム構成を提供すること。
【解決手段】内部に気密な空間を有するアームベース8と、アームベース8内に設置されたアーム駆動用モータ9と、アーム駆動用モータ9によって回転する中空の減速機シャフト31と、減速機シャフト31の回転が入力されて所定の比だけ減速し、減速機シャフト31の周囲で回転する第1減速機出力軸32と、からなり、アームベース8内に減速機シャフト31の下端が露出するよう設置された第1減速機10と、中空の減速機シャフト31の上端が侵入することでアームベース8の気密な空間と同圧となる気密な空間を有し、かつ第1減速機出力軸32に固定される第1アーム2と、第1アーム2の先端に設置され、入力軸が減速機シャフト31と接続された第2減速機15と、第2減速機15の出力軸に固定され、内部に気密な空間を有しない第2アームと、第1アーム2と第2アーム5とに追従するリンク機構と、を備えた。
(もっと読む)
基板搬送ロボット
【課題】大重量の基板を高い信頼性で搬送できる基板搬送ロボットを提供する。
【解決手段】本ロボットは、それぞれが基板を保持する第1及び第2基板保持部11,12を有し、さらに、第1及び第2基板保持部11,12が装着された第1及び第2アーム機構13,14を備える。第1アーム機構13は、主旋回軸を含む平面に関して互いに対称に配置された一対の第1アーム19を有し、第1アーム19のそれぞれが、その中間部にて内向きに折曲可能に構成されている。第2アーム機構14は、主旋回軸を含む平面に関して互いに対称に配置された一対の第2アーム20を有し、第2アーム10のそれぞれが、その中間部にて外向きに折曲可能に構成されている。
(もっと読む)
真空搬送装置及び表示装置の製造方法
【課題】
ストロークの大きな真空搬送装置であっても、適時にその駆動系を覆う容器の内部を真空排気出来る基板搬送装置を提供することを本発明の課題とする。
【解決手段】
本発明の係わる真空搬送装置は、内部を排気し得る第一の容器、前記第一の容器内に位置する内部を排気し得る第二の容器、前記第二の容器を一の方向に並進移動をさせる運動手段、排気手段と連通/遮断をするバルブ及び第一の容器に設けられた中空部分を有する第一の接合部、前記第二の容器に設けられた前記第一の接続部に対向する中空柱状体の突出部並びに前記中空柱状体の突出部の内側を移動可能で、前記第一の接合部に前記運動手段により接合可能な中空柱状体の部分を有する第二の接続部を有する構成とする。
(もっと読む)
ダイレクトドライブモータ
【課題】雰囲気汚染を回避しながらも、高精度にロータの回転角度を検出でき、更に信頼性を確保できるダイレクトドライブモータを提供する。
【解決手段】隔壁13の円板部13aの肉厚が、円筒部13bの肉厚より厚くなっているので、寸法精度や機械精度および温度変化に起因して、隔壁13に変形が生じた場合でも、薄肉の円筒部13bが先に変形することで、隔壁13の軸方向応力や曲げ応力を緩和することができ、それによりシール不良や破壊などを防ぐことができる。
(もっと読む)
多段モータを駆動源とする基板搬送ロボット
【課題】多段同芯モータを駆動源に有する基板搬送ロボットにおいて、モータの検出部が小型であって、アームの高い制御性能を確保でき、また検出部の交換が容易な基板搬送ロボットを提供する。
【解決手段】ロボットアームを駆動する第1回転モータ13と第2回転モータ14を軸方向に多段に配置した駆動部を有する基板搬送用ロボットにおいて、第1回転モータ13の回転位置検出部が、第1インクリメンタルエンコーダヘッド21と、それよりも回転位置検出精度の粗い絶対値位置検出器である回転角度センサ25a,bとから成り、第2回転モータ14の回転位置検出部が、第2インクリメンタルエンコーダヘッド22と、それよりも回転位置検出精度の粗い絶対値位置検出器である回転角度センサ26a,bとから成るよう構成した。
(もっと読む)
ワーク搬送装置
【課題】輻射熱を受けやすい部材から効率よく熱を逃すことができるワーク搬送装置を提供する。
【解決手段】ワークを搬送するためのワーク搬送機構を備えたワーク搬送装置であって、ワーク搬送機構の外表面各所には、冷媒循環用の冷却パイプ84が付設されており、冷却パイプ84は、上記外表面に対して弾性部材85を挟んだ状態で固定具86を介して押圧固定されている。
(もっと読む)
真空搬送装置の製造方法及び真空搬送装置
【課題】アームの軽量化を図りつつ、製造工程を簡略化することができる真空搬送装置の製造方法及び真空搬送装置を提供する。
【解決手段】搬送ロボットの製造方法において、アーム本体20を構成する上側板25、下側板26及び環状部材27と、関節軸を支持する各ブシュ21〜23とから中空構造のアーム5を組み立て、上側板25、下側板26及び環状部材27を互いに接合する接合部と、それらの部材と各ブシュ21〜23の接合部とにロウ材を付着させる工程と、組み立てられたアーム5を真空加熱して、ロウ付けする工程とを有する。
(もっと読む)
真空用接触センサ
【課題】構成簡易ながら検知範囲を広く設定し得る上に死角が少なく、かつ接近感知部を軽量とすることが可能な真空用接触センサを得る。
【解決手段】接近感知部10は、互いに接触または近接すると電気的に導通するように構成された可撓性を有する第1および第2の導電性薄板11,12を、内外方向に互いに離間した状態でアーチ状に湾曲形成してなるものであり、マニピュレータ3の先端表面部の全域を覆うように配置されている。マニピュレータ3が他物体と衝突する前に接近感知部10が他物体に当接して変形し、第1および第2の導電性薄板11,12が互いに接触または近接して電気的に導通したことを導通検出回路部20が検出することにより、マニピュレータ3が他物体と接近したことを検知する。
(もっと読む)
多軸モータ
【課題】例えばロボットの高精度な位置決めを実現しながらも、低コストである多軸モータを提供する。
【解決手段】制御装置CONTからの電力供給により電磁コイル126が励磁されると、ハウジング円盤125と第2円盤122が磁化され、互いに吸引する吸引力に基づく駆動力が発生するので、かかる駆動力が圧縮バネ124の付勢力より大きければ、ハウジング円盤125に第2円盤122が吸引され、お互いに押圧し合うように係合することで摩擦力が作用し、第2軸105をハウジング102に固定することができる。一方、電磁コイル126の励磁を中断すれば、圧縮バネ124の付勢力に応じて、第2円盤122は第1軸106の基板115の上面に当接係合して摩擦力が作用し、第2軸105と第1軸106とが互いにロックする或いはカップリングとして機能する。
(もっと読む)
ダイレクトドライブモータ及びスカラーロボット
【課題】磁極の固定に起因する雰囲気汚染を回避しながらも、ロボットに必要な剛性を確保でき且つ信頼性の高い,大気外の雰囲気中で用いられるダイレクトドライブモータ及びスカラーロボットを提供する。
【解決手段】直列的に連結された3段のブラシレスモータBM1において、ステータ29と、大気軸受装置33と、大気側回転子30と、角度検出器35,36と、モータ回転子21と、真空軸受装置19のうち少なくとも2つを、モータ軸線方向において互いに少なくとも一部が重合する位置に配置しているので、コンパクトな構成ながら、高い剛性を確保することができる。
(もっと読む)
ハンドリング機構及び成膜装置
【課題】被成膜物の反転作業の作業効率を向上させ、被成膜物に対して効率的に成膜すること。
【解決手段】減圧状態で被成膜物Hを一定方向側から成膜する成膜機構21が配置された成膜室2と、被成膜物を収容するために成膜室に隣接して連通可能に設けられた収容室3と、を備える成膜装置1に用いられる機構であって、被成膜物を把持及び把持解除する把持ハンド43と、該把持ハンドを、収容室から成膜室までの範囲で移動可能且つ把持姿勢を反転可能に支持するハンド支持部61と、収容室及び成膜室の外部に配置され、ハンド支持部を介して、収容室から成膜室までの範囲で把持ハンドを移動させるハンド移動部41と、収容室及び成膜室の外部に配置され、把持ハンドの把持姿勢を反転させる反転部44と、を備えるハンドリング機構4を提供する。
(もっと読む)
真空内使用のためのロボット
ロボットは、リソグラフィ装置の真空チャンバ内で対象物を位置決めする。ロボットの第1コンポーネントは、並進軸に沿って対象物を位置決めするために真空チャンバ内に配置される。シャフトは、シャフトの対称軸が並進軸に対して垂直になるように第1コンポーネントを支持し、第2コンポーネントは、対称軸の周りでシャフトを回転させ、かつシャフトを対称軸に対して平行方向に移動させる。第2コンポーネントは、シャフトの外周面に沿ってガスを導入するように構成されたガスベアリングと、第2コンポーネントガスベアリングによって導入されたガスを排気するように構成された排出シールとを含む。ロボットは、炭化水素分子のガス放出を約0〜200a.m.u.の範囲に実質的に減少または除去し、よってロボットは極端紫外線(EUV)フォトリソグラフィ用途での使用に適する。 (もっと読む)
搬送装置
【課題】2つのハンドを備えた搬送装置において、ハンドの動作にともなう振動の発生やアームのダレなどの不都合を低減する。
【解決手段】搬送装置A1は、旋回軸Os周りに旋回可能な旋回ベース2と、旋回ベース2に対し、旋回軸Osを挟んで旋回軸Osから等距離にある回動軸O1,O2周りに回動可能に支持されたアーム4A,4Bと、アーム4A,4Bのそれぞれに固定状に支持され、ワークWを保持しうるハンド6A,6Bと、旋回ベース2を回動させる旋回駆動手段と、アーム4A,4Bを回動させるアーム駆動手段と、を備え、各ハンド6A,6Bは、これに保持させるワークWの中心が位置するべき基準点S1,S2をそれぞれ有し、上記旋回駆動手段と上記アーム駆動手段が連動して、ハンド6A,6Bのいずれか一方を、基準点S1または基準点S2が旋回軸Osを通る水平直線上の移動行程GLを移動するように所定位置間を移動させる。
(もっと読む)
防塵機構を備えた基板搬送ロボット及びそれを備えた半導体製造装置
【課題】直動式アーム内にあるリニアスライダなどの機構からの発塵を抑制するとともに、真空中に置かれる基板搬送ロボットでも使用可能な防塵機構を提供すること
【解決手段】リニアスライダによって直動する直動式アーム3を備えて基板9を所望の位置に搬送する基板搬送ロボット1において、リニアスライダ18、23を摺動可能に保持するリニアレール7、8の近傍に、リニアスライダ18、23と微小な隙間を介して敷設され、ポリ塩化ビニール又はフッ素樹脂で製作された集塵カバ44をリニアレール7、8に沿って敷設した。リニアレール6上を摺動するリニアスライダ7直近に集塵カバ10を設置し、リニアレール6上のリニアスライダ7が摺動する際に飛散するパーティクル13を集塵カバ10のラビリンス形状部で収集し、アームカバ8の開口部からパーティクル13が流出することを防止し、ウエハ搬送フォーク3上のウエハ12にパーティクル13を付着させない処置をする。
(もっと読む)
1 - 20 / 44
[ Back to top ]