
Fターム[3C007BS30]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | マイクロマニピュレータ (77)
Fターム[3C007BS30]に分類される特許
61 - 77 / 77
マイクロマニピュレータシステム、プログラム、及び結果確認支援方法

【課題】 標本に対する操作の成否を作業者が迅速に確認できるようにするマイクロマニピュレータシステム、更には自動的に行った操作が失敗した標本に対し、その操作を再度、自動的に行うことができるマイクロマニピュレータシステムを提供する。
【解決手段】 CPU102は、標本容器Sに入っている標本に針30aを刺して溶液を注入する操作を自動的に行う場合、その操作を行った標本毎に、カメラ制御ユニット9から送られる、針30aを標本に刺した後の画像の記憶装置101への保存、及びその画像を画像表示用メモリ112に格納することによるモニタ113への表示を行う。作業者には、入力装置103を操作させて、標本への溶液の注入が成功したか否かを示すデータを表示させた画像から判定させて入力させる。
(もっと読む)
材料及びその用途

【課題】電気メッキされたCoPtP材料は垂直磁気特性を高め、超小型電気機械システム(MEMS)デバイスの使用において有益である。
【解決手段】94−98重量%のCo,0−1重量%のPt及び2−4重量%のPの組成を有するコバルト(Co),プラチナ(Pt)及びリン(P)から構成される材料。材料はセ氏100乃至500度の温度でアニーリングされる。材料は適当な電気化学浴中で基板を電気メッキすることにより形成される。電気メッキされたCoPtP材料は基板に層を形成する。
(もっと読む)
マイクロマニュピュレータ
【課題】顕微鏡視野内において微小物体を正確かつ迅速に取り扱うことができると共に、消費電力の小さいマイクロマニュピュレータを提供する。
【解決手段】マイクロマニュピュレータは、把持指の先端部を近接させて微小物体を把持するハンドリング部104と、ハンドリング部104をX方向及びY方向に駆動するXY駆動部101と、ハンドリング部104の把持指の先端部を中心として把持指が回動するように把持指の姿勢方向をX、Y方向で同時に変更するθz駆動部102と、ハンドリング部104をZ方向に駆動するZ駆動部103と、を備えている。Z駆動部103はθz駆動部102を介してXY方向に移動可能にXY駆動部101に支持されており、ハンドリング部104はZ方向に移動可能にZ駆動部103に支持されている。
(もっと読む)
マイクロマニュピュレータ
【課題】顕微鏡視野内において微小物体を確実かつ迅速に把持することができるマイクロマニュピュレータを提供する。
【解決手段】マイクロマニュピュレータは微小物体を2本の把持指で把持するハンドリング機構104を備えている。ハンドリング機構104は、微小物体に接触するエンドエフェクタ505aを有し不動の固定指505と、微小物体に接触するエンドエフェクタ507aを有し支点軸を中心に回動可能な可動指507と、可動指507を支点軸を中心に回動させるアクチュエータ502と、を有している。可動指507がアクチュエータ502の駆動により回動することで固定指505のエンドエフェクタ505aの先端に可能指507のエンドエフェクタ507aの先端が接触可能に構成されている。
(もっと読む)
治具、μマニュピュレータ及び治具の製造方法
【課題】 簡易かつ効率よく試料を採取する治具及びその製造方法を提供することを目的とする。
【解決手段】 試料を採取するための先細りの芯を有する治具であって、芯の細い11側の先端部に、芯11より細い複数の突起12が形成されている。芯11の細い側の先端部は半球状であり、半球の曲率半径は、0.5μm以上5μm以下である。突起12の直径は、0.5nm以上20nm以下である。突起12の高さは、50nm以上100μm以下である。突起12の間隔距離は、1nm以上1μm以下である。
(もっと読む)
複数ロボットの制御装置
【課題】ロボット上の操作対象を機械的に操作する操作手段を備え、駆動電圧及び駆動電流で駆動される複数のロボットを容易に制御することのできる構成の簡単な複数ロボットの制御装置を提案する。
【解決手段】本発明は、ロボット上の操作対象を機械的に操作する操作手段を備え、駆動電圧及び駆動電流で駆動される複数のロボットを制御する複数ロボットの制御装置であって、基本波形電圧及び基本波形電流を発生する基本波形発生手段と、複数のロボットを選択する選択手段と、その選択手段によって選択されたロボットに応じて、基本波形発生手段よりの基本波形電圧及び基本波形電流を可変して得た駆動電圧及び駆動電流を該ロボットに供給する可変手段とを有する。
(もっと読む)
マイクロマニピュレータおよびその駆動方法
【課題】微小対象物をソフトに把持したり、微小部位を正確に切断したりすることが容易に行なえるマイクロマニピュレータを提供する。
【解決手段】マイクロマニピュレータ1が先端部分に高分子アクチュエータ11および操作具10を備えた少なくとも一本以上のピペット4と、リード線9を介して高分子アクチュエータ11と電極8間へ電圧を印加する電圧印加装置とから構成され、ピペット4が液中にある前記微小対象物3を、高分子アクチュエータ11の伸縮を利用して、把持、移動または切断などの操作を行なえるようにした。
(もっと読む)
試料観察装置,集束イオンビーム装置
【課題】
真空装置内でプローブを操作するマニピュレータにおいて、小型で広範囲に移動でき精度が高く、かつマニピュレータの駆動手段(アクチュエータ)の長寿命化が期待できる試料観察装置,集束イオンビーム装置を提供すること。
【解決手段】
試料を載置する真空室と、該真空室内で移動可能なプローブと、該プローブを移動させるプローブ駆動手段と、該プローブ駆動手段の負荷を軽減する負荷軽減手段と、を備え、かつ該負荷軽減手段の軽減力を前記プローブの位置の情報に基づいて変化させる制御手段を備えた試料観察装置。
(もっと読む)
マイクロマニピュレータ及びマイクロハンドリング装置
【課題】 被処理物の着脱の制御を正確かつ再現性良く行え、小型化可能なマイクロマニピュレータ及びこれを備えたマイクロハンドリング装置を提供する。
【解決手段】 被処理物を保持するためのカラス製キャピラリー101と、ガラス製キャピラリー101に取り付けられた焦電体102と、焦電体102を加熱するランプ照射系103とを有し、ガラス製キャピラリー101に被処理物を吸着させる際及びガラス製キャピラリー101から被処理物を脱落させる際の少なくとも一方において、焦電体102が発生させる焦電気を用いる。
(もっと読む)
マニュピレータシステム及び顕微鏡システム
【課題】 操作針の針先を標本の観察位置に針先や標本を損傷することなく容易にセットすることが可能なマニュピレータシステム及び顕微鏡システムを提供すること。
【解決手段】 顕微鏡のステージ3に載置された標本5に微細な操作を行うための操作針7を有する電気制御可能な少なくとも1つのマニピュレータ9と、前記マニピュレータの駆動を制御するマニピュレータ制御手段13と、観察前に前記標本の観察位置に対して前記操作針の針先を前記観察位置から離れた位置に停止させるオフセットを設定するオフセット設定手段29を備える制御手段11を有し、観察時、前記制御手段が、前記マニピュレータ制御手段を介して前記マニピュレータを駆動し、前記操作針の針先を前記オフセットされた量だけ標本側に移動し位置決めすることを特徴とするマニュピレータシステムを提供する。
(もっと読む)
マイクロマニピュレーター及びそれを用いた微小物採取方法
【課題】大掛かりな高圧電源や、電気回路、装備などを必要せず、取出しの困難な微小絶縁物を簡単な方法により容易にピックアップして次の解析などにステップアップできるマイクロマニピュレーターとそれを用いた微小絶縁物の採取方法を提供する。
【解決手段】 先端部が尖鋭又は角錐状若しくは円錐状の金属製ニードル1と、アース接地された導電材部2と、該金属製ニードル1の末端部に前記導電材部2との電気的接続をON/OFF切り替え可能な開閉接点部3とを備え、前記金属製ニードル1の先端部側以外の基部と導電材部2と開閉接点部3とが柄部6に装着固定されている。
(もっと読む)
サンプリング用治具及びその製造方法
【課題】 自然な静電気力や粘着性が小さい微小試料や凸凹の構造体を有する領域にある微小試料を、簡易且つ効率良く採取するサンプリング用治具を提供する。
【解決手段】 微小試料を採取する為のサンプリングニードルを有するマイクロマニピュレータのサンプリング用治具において、前記サンプリングニードルの先端部に、突起を有する。突起の側面に更に小突起を付けてもよい。突起及び小突起は、酸化亜鉛針状結晶である。本発明のサンプリング用治具を製造する方法は、前記サンプリングニードルの先端部を含めた表面又は前記表面の一部分を絶縁材料で覆い隠す工程、前記絶縁材料の一部分を剥離する工程、前記剥離部分上に突起を成長させる工程を有する。
(もっと読む)
三次元位置決め装置
【課題】 プローブ、ピンセットあるいはシリンジなどの各種のマニプレータを簡単な操作で且つ高い自由度で位置決めすることのできる簡単な構成の三次元位置決め装置を提供すること。
【解決手段】 基台、この基台に第一の軸により支持され、第一の軸と共にあるいは第一の軸を中心にして独立に回転する第一の回転支持部、第一の回転支持部に、第一の軸に垂直な第二の軸により支持され、第二の軸と共にあるいは第二の軸を中心にして独立に回転する第二の回転支持部、そして第二の回転支持部に、第二の軸に垂直な第三の軸により支持され、第三の軸と共にあるいは第三の軸を中心にして独立に回転する、マニプレータ支持用の第三の回転支持部を含むマニプレータ三次元位置決め装置。
(もっと読む)
ナノグリッパ装置
【課題】 試料が把持されたか否かを確実にかつ容易に確認することができ、試料を適切な状態で把持することができるナノグリッパ装置の提供。
【解決手段】 駆動部6には各アーム3を駆動するめの固定電極および可動電極が設けられている。固定電極60aおよび可動電極61aは左側のアーム3を駆動するものであり、可動電極61aは支持部62により台座7に弾性支持されている。同様にアーム3も支持部63により台座7に弾性支持されている。電極60a,61a間に電圧を印加すると、クーロン力により可動電極61aが右側に移動しアーム3を閉駆動する。検出回路91A,91Bにより検出される電極60a,61a間の静電容量および電極60b,61b間の静電容量の変化に基づいて、試料が把持されたか否かを判断する。
(もっと読む)
光制御可能なデバイス
複数の光トラップによる操作のためのデバイスを開示する。透明なビーズのような接続されたトラップ要素は、トラップ要素から光トラッピング場の有効範囲より大きい距離だけ離された先端にも接続される。 (もっと読む)
電気付着組織マニプレータ
【課題】1本の導電性要素を用いて組織の操作が行える電気付着組織マニプレータを提供する。
【解決手段】このマニプレータは、導電性要素と、必要時に第1及び第2のパルスを発生できる電気手段及び制御手段を備える。第1のパルスは、導電性要素と組織層との間に、組織層を操作するに十分な強さの付着状態を作り出す。第2のパルスは第1のパルスより高いエネルギーを有し、導電性要素から付着した組織層を分離させる非付着状態を作り出す。この電気付着式デバイスは、医療器具と組み合わせることによってその医療器具の能力を組織の操作をできるように強化することができる。本発明の利点は、機械的な器具と異なり、組織を折り曲げたり組織に突き刺したりすることなく導電性要素先端部で組織を操作が可能となり、下部組織に損傷を与えないようにできる点にある。
(もっと読む)
形状記憶合金アクチュエーター
形状記憶合金(SMA)アクチュエーターの電気絶縁層は、SMA支持体の一部分上に形成された無機材料を含む。電気絶縁層の一部分の上にトレースパターンで形成された導電性材料は、第一端部と、第二端部と、及び該第一端部と該第二端部との間に配置された加熱エレメントとを含む。SMA支持体は、トレースパターンの第一端部と第二端部を成端している第一及び第二相互接続パッドを経由して導電性材料中を電流が流れるときに達成される遷移温度において変形するようにトレーニングされる。 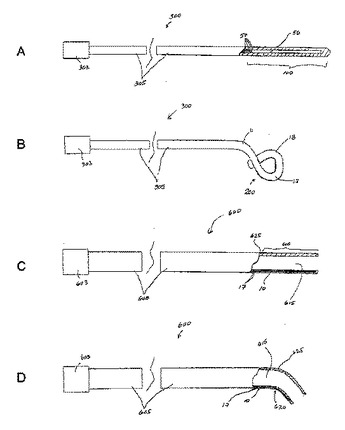 (もっと読む)
(もっと読む)
61 - 77 / 77
[ Back to top ]