
Fターム[3C007BS30]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | マイクロマニピュレータ (77)
Fターム[3C007BS30]に分類される特許
21 - 40 / 77
ピンセット付き走査型プローブ顕微鏡および搬送方法
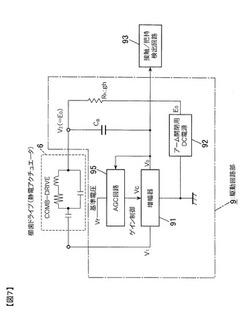
【課題】 ピンセットの基板への接触、試料の把持検出、試料の形状測定ができるピンセット付き走査型プローブ顕微鏡の提供。
【解決手段】ピンセット付き走査型プローブ顕微鏡は、探針部が形成された第1のアームと、第1のアームに対して開閉自在に設けられた第2のアームと、開閉駆動電圧が印加され、第2のアームを開閉駆動する静電アクチュエータと、静電アクチュエータ6が有する電気的等価回路を帰還回路として用いることにより自励発振させ、その自励発振により第2のアームを振動させる増幅器91と利得調整手段95を有し、第2のアームの物体への接触による振動状態の変化を検出する振動状態検出部93とを備える。
(もっと読む)
ナノピンセットおよび把持方法

【課題】アームが物体に接触したことを感度良く検出することができるナノピンセットの提供。
【解決手段】ナノピンセットは、開閉自在な一対のアームと、開閉駆動電圧が印加され、一対のアームの少なくとも一方を開閉駆動する静電アクチュエータ6と、静電アクチュエータ6が有する電気的等価回路を帰還回路として用いることにより自励発振させ、その自励発振によりアームを振動させる増幅器91と、アームの物体への接触による振動の変化を検出する振動変化検出部93とを備えたことを特徴とする。
(もっと読む)
AFMピンセット、AFMピンセットの製造方法および走査型プローブ顕微鏡
【課題】走査型プローブ顕微鏡において、高精度な観察と、安定した把持とを両立させることができるAFMピンセットの提供。
【解決手段】AFMピンセットは、三角柱部材の稜線の先端を走査型プローブ顕微鏡の探針として使用可能な第1のプローブ10Bと、第1のプローブ10Bに対して開閉自在に設けられた三角柱部材から成る第2のプローブ20Bとを備え、各三角柱部材の所定の周面がほぼ平行状態で対向するようにプローブ10B,20Bを並置した。そして、稜線の先端で試料を走査する際の試料との干渉を防止する切り欠き部100を、第1のプローブ10Bに形成した。
(もっと読む)
ピンセット及びこれを備えたマニュピレータシステム
【課題】挟持する力(挟持力)を容易且つ高精度に検出することができると共に、小型化を図ること。
【解決手段】電子顕微鏡観察用の試料を挟持可能なピンセットであって、所定間隔離間して隣接配置され、それぞれ対向する側の先端に試料を挟持する挟持面71a、72aを有する一対の棒状挟持部材71、72を備え、一対の棒状挟持部材が、挟持面の基端側に挟持面と電気的に独立した状態で互いに対向して配された導電部73、74と、これら導電部間の静電容量を測定する静電容量センサ75とを備えていることを特徴とするピンセット70を提供する。
(もっと読む)
マニピュレータシステム及び制御装置
【課題】作業部における動作をする部分が規定の原点位置からずれた状態で作業部が取り外されることを認識して操作者に注意喚起をする。
【解決手段】マニピュレータ10は、操作部14と、交換自在な作業部15とを有する。作業部15は、制御装置514aの作用下に動作する先端動作部12と、固体識別用のIDを保持するID保持部104とを備える。制御装置514aは、ID保持部104のIDを認識するとともに、作業部15が操作部14に接続されているか否かを判断するID認識部120と、先端動作部12が規定の原点位置又は非原点位置であることを認識する原点認識部122と、先端動作部12が非原点位置であると判断される場合で、先端動作部12が操作部14から外されたと判断されるときに取外警告を発する警告部124とを有する。
(もっと読む)
光勾配力を印加する改良された装置、システムおよび方法
【課題】 粒子を操作するための光トラップアレイを生成し、制御する。
【解決手段】 本発明は、レーザ光をビームレットに回折することと、(レーザ光に関して仮想のレンズとして働いて)ビームレットを収束させることとの両方が可能であり、それによって回折されたレーザビームをフォーカスレンズに転送するための複数の物理的なレンズの必要をなくす二重の機能を有する光学素子に関連する。本発明はまた、回折されないレーザ光から生じる反射・散乱の雑音の量を制限することによって、光トラップのモニタリングをより向上させることにも関連する。
(もっと読む)
マニピュレータ
【課題】複数の圧電素子を個別に駆動して、各圧電素子の駆動に応じた駆動力を駆動対象に付与すること。
【解決手段】ハウジング48内に、圧電素子54、55、間座56、軸受58、60が収納され、軸受58は、間座56との当接により、軸受60は、ロックナット66との当接により、それぞれねじ軸50の軸方向への移動が規制され、ロックナット66の位置に応じた締結力が圧電素子54、55に付与される。圧電素子54に電圧V1が印加されると、圧電素子54の操作駆動に伴う押圧力がねじ軸50を介してインジェクションピペット34に付与され、細胞に針が挿入される。圧電素子55に微動用電圧V0が印加されると、圧電素子55の微動駆動に伴う押圧力が圧電素子54、ねじ軸50を介してインジェクションピペット34に付与され、インジェクションピペット3の位置が微調整される。
(もっと読む)
ホログラム2次元パターン、および、ラゲールガウシアンビームの生成方法、並びに、光マニピュレーションシステム。
【課題】ラゲールガウシアンビームを効率的に生成できる、ラゲールガウシアンビーム生成用回折格子としてのホログラム2次元パターンを提供する。
【解決手段】ラゲールガウシアンビーム生成用回折格子としてのホログラム2次元パターン200は、一様な流れの中におかれた湧源から周囲に一様に湧き出す2次元完全流体の流線に基づいて作製されている。
(もっと読む)
マイクロマニピュレータ
【課題】 先端で微細加工が可能なマイクロマニピュレータを提供する。
【解決手段】 アームホルダ2に保持されるアーム3と、前記アーム3の先端に備えられたモータホルダ4と、前記モータホルダ4に固定された小型モータ5と、から構成され、前記小型モータ5の出力軸6はダイヤモンドで形成され、その先端にレーザ加工を行い、ドリル刃7を形成することにより、穴あけや切削等の微細加工が可能となり、また、ドリル刃の芯出し精度を考慮する必要が無くなり、より高精度な加工が可能となる。
(もっと読む)
マイクロロボット
【課題】 本発明の目的はマイクロロボットなどに使用される自走機構より成る移動装置において、移動する床面状態が平面でなくとも、即ちうねり、歪曲等曲面であっても又、床面状態が平滑でなく表面粗さがあっても対応する移動装置を提供することにある。
【解決手段】 駆動された圧電素子の伸長収縮運動が確実に前脚又は後脚に伝達されるよう後脚ホルダーと中間ホルダーの両端頂部に各2個のストッパーにより固定された2枚のバネ性あるリーフスプリングが橋渡し状に配置され弾力的に接続されたことを特徴とする移動装置。
(もっと読む)
マニピュレータ
【課題】誤差運動が発生し難く、微細で正確な動作が可能なマニピュレータを提供する。
【解決手段】円筒形のマニピュレータ本体10と、マニピュレータ本体10に設けられたスタイラス支持手段11と、スタイラス支持手段11に略重心位置122を支持された棒状のスタイラス12と、スタイラス12を変位させる変位手段13と、を備え、スタイラス支持手段11は、弾性部材から形成される弾性支持膜111を備え、弾性支持膜111は、スタイラス12を支持する中心部113と、マニピュレータ本体10に固定された外周部114と、中心部113と外周部114との間に放射状に設けられ中心部113と外周部114とを連結する複数のリム115と、を備えるマニピュレータ1。
(もっと読む)
細胞マニピュレータ
【課題】インジェクションピペットに対する微動動作とインジェクション動作を同一の手段で実施すること。
【解決手段】細胞に針を挿入するインジェクションピペット34と、インジェクションピペット34の位置を制御するXY軸テーブル36およびZ軸テーブル38を備え、インジェクションピペット34を支持するZ軸テーブル38に微動機構44を内蔵し、微動機構44は、印加電圧に応じてインジェクションピペット34の長手方向に沿って伸縮する圧電素子54と、圧電素子54に対する印加電圧を制御する制御回路を有し、圧電素子54は、微動用電圧の印加に応答してインジェクションピペット34をその長手方向に沿って微動駆動し、インジェクション用電圧の印加に応答してインジェクションピペット34に針を挿入するための押圧力を付与する。
(もっと読む)
顕微鏡微細作業用マイクロマニピュレーション装置
【課題】顕微鏡観察画像視野下で顕体試料とマイクロプローブの針先を観察しながら、半導体集積回路などの多層微細配線深層部へダイレクトに電気的特性の測定を行ない不良箇所の解析を行なうにおいて、絶縁膜を効率的に除去し、測定対象箇所へのプローブの移動と位置決めを効率的に行ない、同時に操作性および確実性に優れた微細作業を行なうことのできるマニピュレーション装置の提供
【構成】局所プラズマ機構、および該局所プラズマ機構の先端部であるプラズマキャピラリー管を把持するプラズマキャピラリー管位置決めステージ、試料ステージおよび1つまたはそれ以上のプローバがプローバベース上に載置され、該プローバベースが顕微鏡の視野下に着脱自在に装着できる構造を有することを特徴とする顕微鏡微細作業用マイクロマニピュレーション装置である。
(もっと読む)
試料を搬送するための搬送機構
【課題】 本発明は第1ホルダ(40)内の第1位置から第2ホルダ(10)内の第2位置へ、及び/又はその逆へ試料(2)を搬送する搬送機構に関する。
【解決手段】 各ホルダ(10,40)は脱着可能な状態で試料を保持するように備えられ、ホルダ間での試料の搬送は、第2位置とは異なる搬送位置で行われる。試料がホルダ(10,40)間を搬送されるとき、機械的案内機構は、第2位置での相互精度よりも高い相互精度でホルダを位置設定し、かつ試料が第2位置にあるときには、ホルダ(10,40)のうちの少なくとも1は位置設定されない。
機械的案内機構は追加部分(50)を有して良い。
ホルダ(40)のうちの少なくとも1は多数の試料を保持するように備えられて良い。
(もっと読む)
MEMS部品の保護治具、ナノピンセット装置、ナノピンセット装置の装着方法
【課題】ナノピンセットユニット取り付け作業中のナノピンセット破損を防止することができるナノピンセット保護用治具を提供する。
【解決手段】
ナノピンセット保護用治具の取付アダプタ70Aにガイド溝72Aを設け、保護カバー80Aにガイド突起部84Aを設ける。そして、取付アダプタ70Aのガイド溝72Aに保護カバー80Aのガイド突起部84Aを嵌合させながら保護カバー80Aを移動することによって、保護カバー80Aを回転し、斜め横方向に移動することができ、保護カバー80Aをナノピンセットユニット11に接触させないで外すことができる。
(もっと読む)
マイクロマニピュレータ
【課題】電子顕微鏡の真空中、電子線下で生物試料に微細操作を行えるようにする。
【解決手段】電子顕微鏡の真空の試料室内2で微小試料を掴んで微小な回動、移動、開放動作が可能なマニピュレータ10を備える。マニピュレータ10は並進3自由度型である。マニピュレータ10を光軸に対して位置合わせする位置調整機構5と、試料室内にあるマニピュレータの微小な針先合わせを電子顕微鏡モニタを観察しながら外部から操作する針先合わせ機構12と、電力供給用及び電気信号検出用のリード線を試料室の内から外へ気密性を保持して引き出すリード線引出し孔95とを備え、これらの位置調整機構,針先合わせ機構の操作部及びリード線引出し孔とが一つのフランジ71に集約的に配設され、このフランジが試料室の壁部の取付孔96に気密封止により取り付けられている。
(もっと読む)
把持装置
【課題】例えば微小機械部品などの被把持物を、より良好に把持することが可能な把持装置を提供する。
【解決手段】把持装置10は二つのフィンガー部材46、46と、フィンガー部材46、46を互いに近接する方向に付勢する弾性梁38、38と、弾性梁38、38の付勢に抗して、フィンガー部材46、46を互いに離間させるスピンドル36を備えたマイクロメータヘッド22とを有する。マイクロメータヘッド22のスピンドル36が移動することによって、弾性梁38、38の押圧面50、50が押圧されると、弾性梁38、38が弾性変形して、フィンガー部材46、46の先端部56、56が互いに離間する。
(もっと読む)
マイクロマニピュレータ
【課題】把持指開閉の微調整可能で操作性の高いマイクロマニュピュレータを提供する。
【解決手段】細胞ハンドリングシステムは、把持アクチュエータ71の駆動力により2本の把持指の先端部を近接させて細胞を把持するハンドリング部と、ハンドリング部をX、Y及びZ方向に移動させるX、Y、Z方向アクチュエータと、ポテンショメータ9aを有し、アクチュエータ71の駆動信号を入力するための第1コントローラと、X、Y、Zアクチュエータの駆動信号を入力するための第2コントローラと、ポテンショメータ9aから出力される電圧とホール素子715aから出力される電圧との差がゼロとなるようにアクチュエータ71の駆動を制御する把持アクチュエータ制御部70と、第2コントローラからの入力に応じたパルス数により、X、Y、Zアクチュエータの駆動を制御するX、Y、Zアクチュエータ制御部と、を備える。
(もっと読む)
二軸の力センサを備えたMEMSベース形のマイクログリッパおよびナノグリッパ
広範囲のサイズのマイクロ物品およびナノ物品を把持できかつ二軸の力の検出能力を備えているマイクログリッパの設計およびマイクロファブリケーション法を提供する。グリッピング運動は、1つ以上の電熱アクチュエータにより引起こされる。x方向およびy方向に沿う集積形の力センサは、グリップ力並びに法線方向に沿ってマイクログリッパアームの端部に加えられる力を測定でき、両方ともナノニュートンより小さい分解能を有する。マイクロファブリケーション法は、アクチュエータおよび力センサのモノリシック集積を可能にする。 (もっと読む)
マイクロマニピュレータ
【課題】1本のプローブでも容易に試料の採取が行うことができるマイクロマニピュレータを提供する。
【解決手段】プローブ7は、中心部15と、中心部15を同心円状に覆う外周部16とからなり、中心部15の先端17を外周部16から露出させている。中心部15はガラス15などの絶縁体で形成されており、電源9に接続されて、電源9に接続されて選択的に正極性もしくは負極性の電圧が印加されることで静電気を帯びる。また、外周部16は、鉄14などの導電体で形成されており、アース接続されて電気を帯びない状態となる。したがって、半導体ウエハ2上の試料3を採取した時に、試料3が外周部16の表面には吸着せず、先端17に吸着する。
(もっと読む)
21 - 40 / 77
[ Back to top ]