
Fターム[3C007BS30]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | マイクロマニピュレータ (77)
Fターム[3C007BS30]に分類される特許
41 - 60 / 77
駆動機構及び低侵襲外科手術用マニピュレータ

【課題】連結部に回転を入力して連結部を屈曲又は湾曲させることができる駆動機構を提供する。
【解決手段】鉗子1は、被連結部材23同士を連結する屈曲リンク21及び把持リンク22を備え、把持リンク22は、被連結部材23に対して軸方向に移動不可能に連結され、屈曲リンク21の第1軸11aには、被連結部材23の第2プレート17に螺合する第2雄ねじ14が設けられ、屈曲リンク21の第2軸11bには、被連結部材23の第1プレート16に螺合する第1雄ねじ12が設けられ、第1雄ねじ12及び第2雄ねじ14は、屈曲リンク21を一方向へ回転させたときに被連結部材23同士を近接させ、他方向へ回転させたときに被連結部材を離間させるように互いに逆方向に形成されるとともに、互いに同一ピッチに形成されている。
(もっと読む)
ナノピンセット、把持力検出方法およびナノピンセットの駆動装置

【課題】微小な把持力を検出することができるナノピンセット
【解決手段】ナノピンセットに設けられたグリッパ部Gには一対のアーム1,2が設けられており、アーム1を駆動機構3による駆動することにより、アーム1,2間に試料を把持することができる。アーム2側には駆動機構4が設けられており、櫛歯状凹凸部40,41間に働く静電力によりアーム2が振動駆動される。試料を把持する際にはアーム2が振動駆動され、把持時における振動振幅の変化をアドミッタンス変化として検出することにより、把持力を算出する。
(もっと読む)
移動装置及び制御方法
【課題】長時間にわたって精密移動し得るようにする。
【解決手段】移動装置1は、第1ベース板3に対して、脚部ユニット11A及び11Bにおいて永久磁石7の磁力による通常吸着と当該永久磁石7及び電磁石部12の磁力による強吸着とを切り換えながら圧電素子10の全長を伸張させることにより前後方向に移動する第1移動部5と、当該第1移動部5と同様の動作により第2ベース板4を左右方向に移動させる第2移動部6とを組み合わせたことにより、第1ベース板3に対して第2ベース板4を2軸方向に自在に移動し得ると共に、静止状態においてコイルに電流を流し続けることなく静止位置を維持することができる。
(もっと読む)
移動装置及びその動作方法
【課題】簡易な構成であり、かつ、三つの自由度を持ち、さらに、電磁石の使用を回避できる移動装置を提供する。また、X−Y方向への移動におけるエネルギー効率が良く、制御も容易な移動装置を提供する。
【解決手段】例えばX方向への移動においては、第1圧電素子11を、比較的遅い速さで伸張させる。一方、第2圧電素子12を比較的遅い速さで収縮させる。これにより、ウエイト部3だけを、X方向に移動させることができる。ついで、第1圧電素子11を、比較的速い速さで収縮させる。同時に、第2圧電素子12を、比較的速い速さで伸張させる。これにより、ウエイト部3の慣性を利用して、支持部2を、X方向に移動させることができる。このようにして、移動装置をX方向に移動させることができる。
(もっと読む)
マイクロマニピュレータ
【課題】弾力を有する微小物体を適切に把持できると共に、微小物体の弾力値を把握できるマイクロマニピュレータを提供する。
【解決手段】マイクロマニピュレータは、細胞を把持する把持指と、把持指を駆動する把持アクチュエータと、把持アクチュエータに内蔵され把持アクチュエータの回動角度を検出するホール素子と、少なくとも把持指が細胞に接触した後に、入力された把持アクチュエータの目標角度とホール素子で検出された回動角度との角度差が小さくなるように把持アクチュエータに供給する電流値を制御し、角度差に基づいて把持指が細胞を把持したかを判断し、把持したと判断したときに微小物体の弾力値を演算するPLC8と、を備えている。把持アクチュエータに供給される電流値が把持に伴う細胞からの反発力にあわせて制御される。
(もっと読む)
誘電泳動ピンセット装置および方法
粒子の捕捉を含む種々の用途のための、誘電泳動(DEP)ピンセット装置および方法。2つの電極が、先端を形成する細長物上に配置されているか、またはこれを構成する。これらの電極間に電圧を印加して、不均一な電磁場を先端に近接して発生させ、これによって誘電泳動トラップを作り出す。一旦捕捉すると、この粒子を、細長物または粒子が存在している媒体を操作することにより、所望の位置に移動させることができる。複数のDEPピンセット装置を、先端のアレイを形成するように配置してもよく、それぞれがその先端に限定した局所的な電磁場を発生することができる。かかるDEPアレイは、ナノリソグラフィまたはナノマニピュレーションに関連するナノファブリケーションプロセス、およびデータ記憶および検索用途において用いることができる。 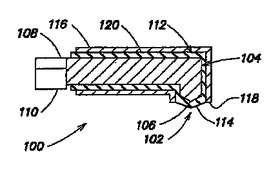 (もっと読む)
(もっと読む)
マイクロマニピュレータ
【課題】装置全体を複雑にすることなく微小物体を容易かつ適切に操作することができるマイクロマニピュレータを提供する。
【解決手段】マイクロマニピュレータ1は、細胞を載置するためのXYステージ42と、細胞を操作するための第1操作ユニット3と、第2操作ユニット4とを備えている。第1操作ユニット3は、細胞を操作するハンドリング部34と、ハンドリング部34をX、Y方向に移動させるXY駆動部31と、XY駆動部31に支持され、ハンドリング部34をZ方向に移動させるZ駆動部33とを有している。第2操作ユニット4は、細胞を操作するハンドリング部44と、XYステージ42をX、Y方向に移動させるXY駆動部41と、ハンドリング部44をZ方向に移動させるZ駆動部43とを有している。第1、第2操作ユニットでハンドリング部34、44に対する操作機能が異なる。
(もっと読む)
マイクロプレートの把持機構
【課題】回転モータ及びねじ送り機構を用いることなくマイクロプレートを把持する。
【解決手段】一対の把持アーム30a、30bにより、マイクロプレートMの両側面を挟むようにされたマイクロプレートの把持機構において、前記把持アーム30a、30bを開閉方向に摺動ガイドするスライド機構40と、前記把持アーム30a、30bを閉方向に付勢する付勢手段(引張りばね50)と、該付勢手段(50)に抗して、前記把持アーム30a、30bを開くための回転リンク52と、該回転リンク52を駆動するための回転ソレノイド60とを備える。
(もっと読む)
ナノピンセット装置および微小試料の把持方法
【課題】 微小物体を正確に把持したり解放したりすることができるナノピンセット装置を提供すること。
【解決手段】 ナノピンセット1の静電アクチュエータ4a,4bを構成する固定電極5a,5bおよび可動電極6a,6bは、いずれも櫛歯形状を呈しており、相互に複数の櫛歯が噛み合うように対向配置されている。固定電極5a,5bは台座10に固定され、可動電極6a,6bは細いビーム状の支持部7によって台座10に弾性的に固定されている。電源回路2により固定電極5a,5bと可動電極6a,6bとの間に直流電圧を印加すると、クーロン力により可動電極6a,6bが移動してアーム3を駆動する。ナノピンセット装置50では、静電アクチュエータ4a,4bをロック状態とすることにより、微小物体を確実に把持することができる。
(もっと読む)
5度の自由度を持つ、キャリヤ用移動プラットホーム
【課題】キャリヤ及び間隔が隔てられた少なくとも三つのクランプ手段を含む移動プラットホームを提供する。
【解決手段】クランプ手段の各々は、キャリヤを、接触点のところで、及びキャリヤの少なくとも一つのグローブ状接触面のところでクランプし、少なくとも一つのクランプ手段には、キャリヤを少なくとも二つの仮想軸線を中心として回転できるように、接触点を、少なくとも夫々の接触面及び/又は少なくとも夫々のクランプ手段に対して変位するための少なくとも一つの変位エレメントが設けられており、クランプ手段によってキャリヤに加えられる法線力は、ほぼ平行な平面内にあり、これらの平行な平面は、夫々の接触点でのグローブ状表面の接線方向平面に対してほぼ垂直である。
(もっと読む)
微小試料把持方法、微小試料把持装置のコントローラおよび微小試料把持システム
【課題】 微小試料の把持および解放を正確に行うことができるナノピンセット装置の提供。
【解決手段】 ナノピンセット1の静電アクチュエータ4a,4bを構成する固定電極5a,5bおよび可動電極6a,6bは、いずれも櫛歯形状を呈しており、相互に複数の櫛歯が噛み合うように対向配置されている。固定電極5a,5bは台座10に固定され、アーム3a,3bおよび可動電極6a,6bは、支持部7a,7bおよびアーム支持部9a,9bにより弾性的に支持されている。記憶部40bには、各アーム3a,3bの弾性特性に応じた電圧出力パターンが記憶されている。この電圧出力パターンに基づいて静電アクチュエータ4a,4bに駆動電圧を印加することにより、アーム3a,3bは左右対称に駆動される。
(もっと読む)
マイクロマニピュレータ
【課題】顕微鏡視野内において微小物体を正確かつ迅速に取り扱うことができ、消費電力の小さい小型のマイクロマニピュレータを提供する。
【解決手段】マイクロマニピュレータ100は、把持指の先端部を近接させて微小物体を把持するハンドリング部104と、パンタグラフ機構204を変位させハンドリング部104をX方向及びY方向に駆動するXY駆動部101と、パンタグラフ機構204を変位させハンドリング部104の把持指の先端部を中心として把持指が揺動するようにハンドリング部104の姿勢方向を変更するθz駆動部102と、ハンドリング部104をZ方向に駆動するZ駆動部103と、を備えており、XY駆動部101とθz駆動部102とは一体に構成されている。Z駆動部103はパンタグラフ機構204の出力リンク204jに支持されており、ハンドリング部104はZ駆動部103に支持されている。
(もっと読む)
光学的勾配力を適用するための装置
【課題】単一光ビームから複数の光学トラップを形成する。
【解決手段】誘電体小粒子を操作するための装置及び方法。本装置及び方法は、レーザービームを受取り、複数のレーザービームを形成する光学回折素子(40)の使用を含む。これらの光ビームは、次いで、テレスコープレンズ系により操作され、次いで、対物レンズ素子(20)により操作されて、誘電体小粒子を操作するための光学トラップ(50)のアレイを形成する。
(もっと読む)
微小物体ハンドリングシステム
【課題】マイクロマニピュレータへのX軸及びY軸方向の駆動指令を誤っても、中断することなく操作を続行可能な微小物体ハンドリングシステムを提供する。
【解決手段】モニタの画面中心Oをエンドエフェクタの先端部の初期位置に設定し、顕微鏡の倍率と、画面中心Oから水平及び垂直画面端までの距離に相当するX方向及びY方向の初期位置からの実距離との関係を表す相関テーブルとから実距離(Xmax,Ymax)を演算し、初期位置から実距離(Xmax,Ymax)間を駆動するための駆動許容パルス数(PXmax,PYmax)を演算しておき、駆動許容パルス数(PXmax,PYmax)を越えるX及びY方向ステッピングモータへのパルスの出力を制限する。エンドエフェクタの先端部が画面の画像表示範囲を越えて駆動しない。
(もっと読む)
把持機器を用いて房から一度に1つの個別の毛髪/繊維を除去するための装置
対向する第1及び第2把持要素(5,6)を有する把持機器(4)を用いて、房(3)から一度に1つの個別の毛髪/繊維(2)を除去するための装置(1)。第1及び第2把持要素(5,6)は互いに関して相対的に移動可能であり、第1把持要素(5)は第2把持要素(6)の方を向いたくさび形の溝(7)を有し、また第2把持要素(6)は本質的に平坦な押圧受け領域(8)を有し、その際、第1把持要素(5)はくさび形の溝(7)側で先細になっている(テーパA)。  (もっと読む)
(もっと読む)
把持装置
【課題】微小部品を把持するのに適した把持装置を提供する。
【解決手段】フィンガー部101の先端が閉じた状態(a)において、回転部材230を一方方向に回転させると、回転部材230の回転に伴い円弧を描くように移動する回転ベアリング422,423によって、フィンガー部101の屈曲部335が内側に向かって押される。圧縮ばね501の付勢力に逆らって、回転部材230をそのまま回転をさせていくと、フィンガー部101の後端は閉じていき、フィンガー部101の先端は開いていく。一方、フィンガー部101の先端が開いている状態(b)において、回転部材230を他方方向に回転させると、回転部材230の回転に伴い円弧を描くように移動する回転ベアリング422,423に追従して、フィンガー部101の屈曲部335が外側に向かって移動する。回転部材230をそのまま回転させていくと、フィンガー部101の後端は開いていき、フィンガー部101の先端は閉じていく。
(もっと読む)
挟持具および挟持装置ならびに挟持方法
【課題】物体を破壊することなく確実に挟持することが可能な挟持具およびこれを用いた挟持装置ならびに挟持方法を提供する。
【解決手段】一対の支持体11と、一対の支持体11の先端側に設けられ、電圧の印加により変形する保持部12とを備えたことを特徴とするマイクロピンセット10である。また、基板を載置固定するステージと、ステージの上方に配置されたマイクロピンセット10と、マイクロピンセット10に電圧を印加する電圧印加部と、ステージまたは電圧印加部を移動させて、ステージとマイクロピンセット10の位置を調整する駆動部とを備えた挟持装置およびマイクロピンセット10を用いた挟持方法である。
(もっと読む)
外側に可動部を持たない小型ロボット
【課題】 自律推進型で外側に可動部を持たない超小型化可能なカプセルロボットを提供する。
【解決手段】 カプセルロボット(1)は、筒状の本体(3)と、この本体の内部に該本体の進行方向と平行に移動自在に収納された可動体(4)と、本体(3)内において可動体(4)を前記本体の進行方向と反対の方向には高速で移動させ、前記本体の進行方向には低速で移動させる駆動手段(5)とを備える。可動体(4)の移動により運動量保存則及び静止摩擦に基づき本体(3)を進行させる。
(もっと読む)
ナノピンセット、これを備える微小力計測装置および方法
【課題】 把持した微小試料の力計測ができるナノピンセットを提供すること。
【解決手段】 ナノピンセット1には、支持体1aからY方向に向かって、振動カンチレバー10、静止カンチレバー20、駆動レバー30および検出レバー40が突設されている。先ず、振動カンチレバー10をX方向に撓み振動させて、その共振周波数f0を測定し、次に、振動カンチレバー10の先端12aと静止カンチレバー20の先端22aとの間にDNA断片を捕捉した状態で、振動カンチレバー10の共振周波数f1を測定する。共振周波数のシフト量(f0−f1)からDNA断片のバネ定数や力などの力特性を計測する。
(もっと読む)
マイクロマニピュレータシステム、プログラム、及び結果確認支援方法
【課題】 標本に対する操作の成否を作業者が迅速に確認できるようにするマイクロマニピュレータシステム、更には自動的に行った操作が失敗した標本に対し、その操作を再度、自動的に行うことができるマイクロマニピュレータシステムを提供する。
【解決手段】 CPU102は、標本容器Sに入っている標本に針30aを刺して溶液を注入する操作を自動的に行う場合、その操作を行った標本毎に、カメラ制御ユニット9から送られる、針30aを標本に刺した後の画像の記憶装置101への保存、及びその画像を画像表示用メモリ112に格納することによるモニタ113への表示を行う。作業者には、入力装置103を操作させて、標本への溶液の注入が成功したか否かを示すデータを表示させた画像から判定させて入力させる。
(もっと読む)
41 - 60 / 77
[ Back to top ]