
Fターム[3C007CS04]の内容
マニピュレータ、ロボット (46,145) | 基台 (1,360) | 軌道に沿って走行するもの (64) | 床上軌道 (31)
Fターム[3C007CS04]に分類される特許
1 - 20 / 31
加工システム及び加工方法
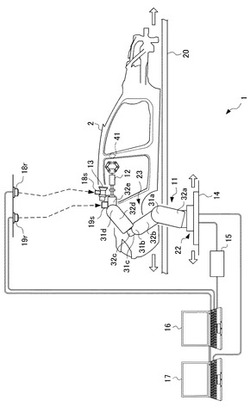
【課題】ワークの加工ラインの製造コストを減少させ、かつ、ワークを効率的に加工すること。
【解決手段】加工システム1において、連続搬送機構20は、ワーク2を連続搬送させる。加工機12は、ワーク2に対して所定の加工動作を行う。ロボット11は、加工機12が先端に取り付けられているアーム23と、アーム23が取り付けられるロボットベース22と、を有する。ロボット移動機構14は、ロボットベース22が取り付けられ、ロボット11を移動させる。ロボット制御装置16は、アーム23の移動制御と共に、ロボット移動機構14に対する移動制御を実行する。即ち、ロボット制御装置16は、ロボット移動機構14の移動制御として、連続搬送機構20によるワーク2の連続搬送とは独立して移動させる制御を実行する。
(もっと読む)
走行装置

【課題】設置期間が短く、コンパクト、安価、且つ安全な、駆動用サーボモータ搭載走行装置を提供する。
【解決手段】本発明の走行装置が備える走行台は、複数の走行台ユニット20で構成され、各走行台ユニットのレール21及びサーキュラーピッチ歯を備える駆動ラック22は、基台27の一方の端部27cから突出して設置される。走行台ユニット同士の連結は、レール及び駆動ラックを他の走行台ユニットの基台の他方の端部27dに架け渡して行う。駆動ラックは、正確にピッチ合せをして敷設した後、駆動ラック位置決め機構30(31、32)を用いて固定する。また、走行台を水平に保つジャッキ23は、レールの垂直下の梁部材24に設けられる。
(もっと読む)
移動装置および移動式ロボット
【課題】ラック&ピニオンギアを用いて高精度に長距離移動可能な移動装置および移動式ロボットを提供する。
【解決手段】モータと減速機とを組み合わせた走行駆動部からの動力により駆動ギアを駆動し、駆動ギアと噛み合うアイドラギア44がラックギア30と噛み合い、走行駆動部からの駆動力をラックギア30に伝達し、駆動ギアとアイドラギア44とをフレーム上で軸支したフローティングギア部を設け、走行台車上にて駆動ギアの軸を中心として回動可能に支持している。フローティングギア部はバネユニットでラックギア30側に付勢されている。走行台車に固定された走行駆動部に直結された駆動ギア自体は可動とせず、アイドラギア44が軸位置を可変とすることで、ラックギア30との噛み合わせポイントが直線上になくとも、常に所望の噛み合わせポイントを保って走行することができる。
(もっと読む)
ロボットシステム
【課題】本発明の課題は、ケーブル使用量の低減を図れるとともに、安全確実かつ継続的にロボットの運用が可能であり、また、ロボットの組み立て、設置、移設、修理等を簡単に行い得るロボットシステムを提供することにある。
【解決手段】本発明に関わるロボットシステムS1は、動力源60の残りエネルギを求める残エネルギ取得手段70、200と、動作指令に対して、予め準備された仮想モデルに対して動作指令を仮想的に実行することにより、動作指令を実行した場合の消費エネルギを予測するシミュレータB002と、動力源60の残りエネルギとシミュレータB002で予測した消費エネルギとを比較して動作指令を実行可能か否か判断する実行可否判断手段200と、比較判断の結果、動作指令を実行可能と判断した場合に動作指令をロボット110、130、140、150に実行させる実行手段200とを備えている。
(もっと読む)
姿勢制御方法および姿勢制御装置
【課題】簡易な制御により、丸管の処理面に対し、処理手段の姿勢を所望の姿勢で臨ませることができる姿勢制御方法および姿勢制御装置を提供する。
【解決手段】処理手段と、処理手段により処理が施される丸管の処理面と、の間の距離を4つの距離計測手段により計測して、処理手段の姿勢を制御する姿勢制御方法であって、第1計測距離から第2計測距離を引いた差分と、第3計測距離から第4計測距離を引いた差分とに基づいて、ピッチ軸周りの姿勢を制御し、第1計測距離から第3計測距離を引いた差分と、第2計測距離から第4計測距離を引いた差分とに基づいて、ヨー軸周りの姿勢を制御し、第2計測距離および第3計測距離を合算した第1合算距離と、第1計測距離および第4計測距離を合算した第2合算距離との差分とに基づいて、ロール軸周りの姿勢を制御する。
(もっと読む)
ロボット制御装置
【課題】ロボット本体に加えて付加軸をも制御する機能を備えるものにあって、手動操作時における十分な安全性を確保する。
【解決手段】作業者がティーチングペンダント4を手動操作することにより、ロボット本体3及び付加軸8〜10を動作させる手動操作モードの実行時において、ロボット制御装置2の制御部12は、ロボット本体3の先端位置の速度及び付加軸8〜10の速度を制限する。このとき、付加軸8〜10の動作がロボット本体3の動作に影響を与えるリンク状態であるかを示すリンク情報が、予め動作パラメータ記憶部14に記憶される。制御部12は、付加軸8〜10がリンク状態である場合には、該当する付加軸の速度とロボット本体3の先端位置の速度とを合わせた全体の速度を最大速度(250mm/sec)以下に制限する。非リンク状態である場合には、付加軸8〜10の速度と、ロボット本体3の先端位置の速度との各々について、最大速度以下に制限する。
(もっと読む)
把持装置
【課題】複雑な制御を行うことなく、収穫対象果実を把持可能なハンド機構を提供する。
【解決手段】収穫対象のイチゴの−Z側に位置決めされるガイド16と、ガイド16に設けられ、Z軸に沿ってスライド移動するスライダ18と、スライダ18に設けられ、スライダ18の+Z方向への移動に伴って、ガイド16と一体的に構成されたストッパ12aと接触することにより、X軸回りに回転する第1回転部22Aと、第1回転部22Aにその下端部が固定され、第1回転部22Aの回転によりその上端部がイチゴに近づく方向に移動する第1フィンガー部24Aと、第1フィンガー部24Aの上端部とともに、収穫対象のイチゴを把持する第2フィンガー部24Bと、を備えている。
(もっと読む)
搬送装置
【課題】設備全体の設置スペースを削減することができるとともに、異仕様のワークを製造ラインに流す場合であっても生産効率を悪化させることなく、工程間におけるワークの搬送を行うことができる搬送装置を安価に提供すること。
【解決手段】製造ライン10において、多数のフリーローラ20を備える搬送軌道12と、搬送軌道12上に移動および離脱可能に載置されて、シリンダブロックWが搭載される複数のパレット13と、パレット13を次工程に移動させるロボット14と、ロボット14の走行軌道15と、ロボット14の動作を制御するコントローラ16とを設けて、搬送軌道12および走行軌道15を、走行軌道15が搬送軌道12より上側に位置するように各加工機11のベット部11bの上方に配置し、コントローラ16からの指令により、シリンダブロックWが搭載されたパレット13を搬送軌道12上で移動させるように、ロボット14の動作を制御する。
(もっと読む)
マニピュレータおよびこれを用いたマニピュレータ装置
【課題】小型でしかもマニピュレータ先端での移動量が大きい処置が可能なマニピュレータとすること。
【解決手段】マニピュレータは、マニピュレータ軸部110と、マニピュレータ軸部110に対して直動自在に支持されると共に駆動源の駆動力により駆動される第1ロッド109と、第1ロッド109に対して回転可能に支持された第1歯車112と、マニピュレータ軸部110に対して支持される第1ラック113と、マニピュレータ軸部110に対して第1ロッド109と同一方向に直動自在に支持された第2ラック115と、第2ラック115の駆動力により駆動される処置具400とを備える。第1ラック113と第2ラック115とは、互いの歯面が向き合うよう配置されている。第1歯車112は、第1ラック113と第2ラック115との間に挟持されて噛み合った状態に配置されている。
(もっと読む)
溶接ロボット
【課題】いろいろな大きさのパネルに対応可能な溶接ロボットを提供する。
【解決手段】パネル1上に仮設でき且つ直列に接続可能なレール2と、パネル1上を転動する車輪14を有する台車3とを備え、レール2と同方向に延びる長尺部材をパネル1に固着するためのMIG溶接トーチ5を台車3に装着し、ローラチェーン8をレール2の全長にわたって取り付け、ローラチェーン8に噛み合って転動し得る駆動スプロケット16を台車3に設けている。
(もっと読む)
軌道走行式作業用機械の教示点補正装置
【課題】理論値の補正を教示作業者が行うことなく、またマニピュレータの手先に半導体センサを搭載することなく教示点の補正を可能にすることにある。
【解決手段】複数の軌道支持装置2により適宜の間隔を存して支持された軌道1を走行し、かつ作業機械制御装置9により制御される作業機械6の動作時における位置姿勢の教示点を補正する軌道走行式作業用機械の教示点補正装置において、軌道1を支持する各軌道支持装置2の軌道支持点に作用する外力及び変形を検出する検出装置7と、この検出装置7の検出情報と作業機械制御装置9より得られる位置情報を用いて位置姿勢補正量を演算し、この位置補正量により作業機械6の教示点を補正して作業機械制御装置9に与える位置姿勢補正装置10とを備える。
(もっと読む)
ロボット
【課題】作業ユニットに対する配線作業をより容易化する。
【解決手段】本発明にかかる直交型ロボット1は、特定方向に移動可能なスライダ43に、所定の作業を行うための作業ユニット10が取り付けられるように構成されており、上記ロボット1の駆動源である各種モータ17,35,47とそのコントローラ2とは、屈曲自在なケーブル保持部材63,71の内部を通るように配索されるケーブル56,54等を介して電気的に接続されている。上記ケーブル保持部材63,71の内部には、上記ケーブル56,54を通すための第1の配索空間83,85と、上記作業ユニット10に接続される作業ユニット用ケーブル79を通すための第2の配索空間84,86とが形成され、これら第1および第2の配索空間(83,84等)が、仕切部材75,76を介して互いに仕切られている。
(もっと読む)
直線動作装置
【課題】シールベルトをループ状にすることなく、また、シールベルトを厳密な長さにする必要がなく、シールベルトの緊張力を抑え直線動作距離を長くすることが可能な直線動作装置を提供すること。
【解決手段】カバー6の一面に移動体1の移動方向に長く開口するスリット7を設け、移動体1をこのスリット7を貫通してカバー6の外に突出するように設けた直線動作装置において、スリット7を端部から被覆するように一端がそれぞれカバー6内部で固定された1対のシールベルト3a、3bと、移動体1の前後に巻芯がシールベルト3a、3bより内側になるように配設され、移動体1の移動によりシールベルト3a、3bの他端側を巻き取り又は巻き出す1対の自動巻取装置4a、4bと、この1対の自動巻取装置4a、4bの間に架設され、両端がシールベルト3a、3bの裏面に重なるように各自動巻取装置4a、4bに巻回された塵埃伝搬防止ベルト5とを備える。
(もっと読む)
旋回軸を含む多軸の搬送ロボット
【課題】 旋回軸等を含む多軸の搬送ロボッハンドを容易に直線的に動作させるため直交ロボットをアームとしたために起きる装置が大型化し、取り回しが困難と成るという欠点を取除き、旋回半径が小さいアームを有する搬送ロボットを提供すること。
【解決手段】 旋回軸等を含む多軸の搬送ロボットにおいて、搬送物を載せるハンドを駆動するアームは2個のステージ有し、一側はハンドに、他側は1個の軸に固着した直交ロボットであることを特徴とする旋回軸等を含む多軸の搬送ロボットとした。
(もっと読む)
ロボットの移動動作精度の確認方法及びロボットの移動システム
【課題】数ミリ以下の単位の位置精度を必要とする移動動作を行うロボットを運転する際、より安価かつ単純な方法で、ロボットの持つ位置情報の有効性を確認することにより事故を未然に防ぐ方法及び該方法を持つ移動システムを提供する。
【解決手段】予め移動システム1に設定された座標に数ミリ以下の単位の精度で移動動作をするロボット2が、該ロボット2のアーム21の先端に取り付けられている作業手段22により、所望の作業を行う際のロボットの移動動作精度の確認方法において、ロボット2の原点4とは異なる基準点5をロボット2の移動領域に設け、ロボット2が一作業を終了してから次の作業を開始する間の移動動作の際に、ロボット2を基準点5の座標に向かって移動させ、ロボット2が実際に移動した実位置と基準点5とを比較し、ロボットの移動動作精度の確認を行うことを特徴とするロボットの移動動作精度の確認方法及びロボットの移動システム1。
(もっと読む)
基板処理システム、基板搬送装置、基板搬送方法、および記録媒体
【課題】搬送中における基板に対して適切な処置を施すことができる基板搬送装置を提供する。
【解決手段】基板搬送装置50は、第1基板収容部20と第2基板収容部30との間を移動可能なフォーク支持体51と、フォーク支持体に移動可能に支持されたフォーク60,65と、を備える。フォークは、第1基板収容部から第2基板収容部へ搬送される基板を第1支持位置において支持し、第2基板収容部から第1基板収容部へ搬送される基板を第1支持位置とは異なる第2支持位置において支持する。第1支持位置に基板を支持したフォークは、フォーク支持体の移動中に第1待機位置に配置され、第2支持位置に基板を支持したフォークは、フォーク支持体の移動中に第1待機位置とは異なる第2待機位置に配置される。
(もっと読む)
溶接ロボット
【課題】溶接ロボットの構造を簡略化し、かつ動作制御も容易に行えるようにする。
【解決手段】ロボット本体20はリニアガイド10により溶接ラインに沿う方向に移動するものであり、台板21にはねじ軸30に沿って昇降するZ軸ブロック29からなるZ軸駆動手段27が装着され、このZ軸ブロック29にY軸モータ35によりY軸方向に駆動される作動アーム34を備えたウィービング動作手段32が装着され、作動アーム34の先端に揺動駆動モータ46により上下方向に揺動する揺動部材42を有する手首関節機構37を介して溶接トーチ4をクランプするクランプ部材38が連結されている。ウィービング動作を行わせる際に、ロボット本体20のハウジング26内に設けた角度センサ39からの検出信号に基づいて、Z軸駆動手段27と手首関節機構37とからなるウィービング補正手段で溶接トーチ4の動作軌跡が補正される。
(もっと読む)
ロボットシステム
【課題】手動誘導運転の際、ハンドを容易に移動させて微調整することができ、またハンドが誤って周囲の物と衝突するのを防止することができるロボットシステムを提供する。
【解決手段】ロボットシステム10は、ロボット本体11とこのロボット本体11を制御する制御部20とを備えている。このうちロボット本体11は、第1のハンド12と、第1のハンド12を第1のハンド12の基端12aから先端12bに向う一定方向に沿って移動させるJ1軸と、J1軸を水平面上で回転させるJ4軸と、J4軸を垂直方向へ移動させるJ3軸と、J3軸を水平面上で一定方向に移動させるJ5軸とを有している。J1軸とJ3軸とJ4軸とJ5軸とを制御部20により同期して駆動し、第1のハンド12を第1のハンド12の中心を基準とするツール座標系のX軸、Y軸、およびC軸上で移動できるようになっている。
(もっと読む)
基板移載ロボット
【課題】基板の位置決めの際に、基板に生じる傷を軽減できる基板移載ロボットを提供すること。
【解決手段】基板が載置されるハンドユニットと、前記ハンドユニット上に載置された前記基板の位置決めを行なう位置決め手段と、を備えた基板移載ロボットにおいて、前記ハンドユニットが、ハンド本体部と、前記ハンド本体部から上方へ突出し、前記基板が載置される複数の載置部材と、を備え、各々の前記載置部材は、その上端において回転自在に支持されて自由回転する回転体を有することを特徴とする。
(もっと読む)
防塵機構を備えた基板搬送装置
【課題】防塵効果が高く、アーム部が複数になっても対応できる防塵機構を提供すること
【解決手段】基板を搭載するアーム部を支持するとともに、支柱9外面に設けられた直線状の開口部12を介して支柱9内に設けられた案内機構22へと接続されて、案内機構22に従って、開口部12の開口を移動する支持部材4と、開口部12を封じて、支柱9内部と外部とを隔離するシールベルト5と、を備え、案内機構22によって支持部材が移動しても、シールベルト5によって支柱の内部が外部に露出しないよう構成された基板搬送装置において、シールベルト5が、その両端を支柱内部に固定されるとともに、支持部材4に回転可能に支持されたローラに巻装されて、開口部12を封じるようにした。
(もっと読む)
1 - 20 / 31
[ Back to top ]