
Fターム[3C007CS05]の内容
マニピュレータ、ロボット (46,145) | 基台 (1,360) | 軌道に沿って走行するもの (64) | 高架軌道 (25)
Fターム[3C007CS05]の下位に属するFターム
Fターム[3C007CS05]に分類される特許
1 - 20 / 22
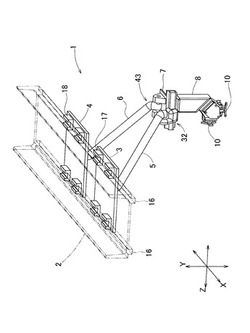
ワーク搬送装置
【課題】 少ない駆動源でワーク保持部材を3軸方向に移動させることができ、小さな駆動源で軽快な移動動作が可能なワーク搬送装置を提供する。
【解決手段】 X,Y,Z軸の直交座標系において、第1および第2の走行体3,4は、X軸方向のレール2に沿って走行可能である。第1の走行体3は、X軸方向の軸心およびZ軸方向の軸心の2つの軸心回りに揺動自在に第1の揺動アーム5を支持する。第2の走行体4は、Z軸方向の軸心回りに揺動自在に第2の揺動アーム6を支持する。第2の揺動アーム6の先端に、Z軸方向の軸心回りに回動自在に支持部材7を設ける。支持部材7にZ軸方向にスライド自在に支持され、かつ第1の揺動アーム5の先端にX軸方向の軸心およびZ軸方向の軸心の2つの軸心回りに回動自在に支持されたワーク保持部材8を設ける。
(もっと読む)
塗装システム

【課題】車体本体に対して揺動可能に連結されたドア等を容易に開状態とすることが可能であり、しかも、作業効率に優れる塗装システムを提供する。
【解決手段】塗装システム10は、塗装ロボット14a〜14dと、オープナーロボット16とを有する。塗装ロボット14a〜14dは、壁24、26に敷設された第1案内レール28に変位自在に係合された走行台車32を介して設けられ、一方、オープナーロボット16は、壁26に敷設された第2案内レール30に変位自在に係合された走行台車34を介して設けられる。このため、塗装ロボット14a〜14dとオープナーロボット16との間には、高低差が存在する。また、オープナーロボット16のアーム部40の先端には、柱状部の先端から互いに逆方向に分岐して延在する第1爪部及び第2爪部を有する略逆T字形状のフック48が設けられる。
(もっと読む)
ビンピッキングシステム
【課題】ロボットによるビンピッキング作業を良好に行うことができながらも、設備全体の大型化を抑制して小型化の要求に応える。
【解決手段】作業台2上に、直角座標型のロボット3、多数個の部品Wをばら積み状態に収容する部品供給箱4、カメラ6、仮置き領域8、部品載置位置7aを有するコンベア装置7を設ける。ロボット3の手首部16に、水平方向に延びる軸を中心に回動するプレート17を設け、このプレート17に、吸着ノズル19とチャック20とをV字状に開いた形態(角度θが90〜135度)で一体的に有する複合ハンドツール18を取付ける。制御装置21は、部品収容箱4内の部品Wをカメラ6によって認識し、吸着ノズル19により1個ずつピックアップして仮置き領域8に仮姿勢とした上で載置し、チャック20を用いて仮置き領域8の部品Wを最終確定姿勢に変換して部品載置位置7aに載置する。
(もっと読む)
大型枠組構造物の溶接ロボット装置
【課題】パネル上にロンジとトランスが交差している大型の枠組構造物の交差部を本溶接することができ、本溶接が可能な溶接部位の制約が少なく、人手に頼る手溶接がほとんど不要であり、大型ガントリ構造による従来のマルチロボット溶接装置と比較して装置全体を小型化でき、複雑な制御システムが不要である大型枠組構造物の溶接ロボット装置を提供する。
【解決手段】1対のロンジ2と1又は1対のトランス3で囲まれた升目形状の枠内を溶接対象領域4とし、溶接対象領域4を跨いで大型枠組構造物に固定され溶接対象領域の上部に位置する水平支持架台12を有するロボット架台10と、水平支持架台12の下面に取付けられ升目形状枠内(溶接対象領域4)の全域にわたり溶接ヘッドを3次元的に数値制御して溶接可能な溶接ロボット20とを備える。
(もっと読む)
作業具の移動装置およびローダ装置
【課題】 共通の駆動源で作業具を2軸方向に移動可能で、構成が簡略な作業具の移動装置を提供する。
【解決手段】 移動装置1は、作業具2を、レール3に沿って移動させ、かつレール3と交差する方向に移動させる。走行用駆動源7,8を搭載し、レール3上を走行する第1および第2走行体4,5と、これら第1および第2走行体4,5の間に位置し、レール3上を走行する中央走行体6と、この中央走行体6にレール3方向と交差する方向に移動自在に設けられ、作業具2が取付けられる移動部材12とを備える。一端が第1走行体4に固定され、中間部が、中央走行体6に設けた第1案内点15、移動部材12に設けた中間案内点17、中央走行体6に設けた第2案内点16の順に巻き掛けられ、他端が第2走行体5に固定された巻掛体18を設ける。
(もっと読む)
ロボット用取付ユニット
【課題】ロボット本体に取付けるための締結固定子が保護用のカバーの穴部から落下することがないように構成しながら、取外した締結固定子をロボット本体に確実に固定することができるロボット用取付ユニットを提供する。
【解決手段】カバー51に形成された長穴部53は、ボルト48の着座面を側方から視認可能に開口しているので、長穴部53から塵や油等の異物が入り込んでボルト48の着座面に付着した場合であっても、それらを清掃することによりボルト48を確実に締付けることができる。
(もっと読む)
ロボットにより工作機械へワークの着脱を行うロボットシステム
【課題】ロボットにより工作機械へワークの着脱を行うロボットシステムの利便性や処理効率を高める。
【解決手段】工作機械10へワーク1の着脱を行うロボット20は、工作機械10の、ワーク1を出し入れするための扉12が形成された左側面14に対して垂直に延びる走行軸部材40、およびそれに沿ってスライド移動するスライダ部材50を有する走行軸機構30と、スライダ部材50に取り付けられた可動アーム機構60を有している。可動アーム機構60は、一端がスライダ部材50に第1の軸71回りに回転可能に取り付けられた第1のアーム70、第1の軸71に平行な第2の軸72回りに回転可能に第1のアーム70の他端に一端が取り付けられた第2のアーム80、および第2のアーム80の他端に取り付けられたワークの保持機構を有している。
(もっと読む)
ロボットのアーム回動範囲変更制御装置
【課題】ソフト制御上の可動制御範囲区域に対して物理ストッパの可動範囲区域を間違えて設定してしまうことを抑制でき、さらに、複数の可動制御範囲区域をアームの所定可動範囲内に確実に設定できるようにする。
【解決手段】ユーザーが複数の可動制御範囲区域のいずれかを設定すると、制御部9は、該可動制御範囲区域に対応する前記可動範囲区域において設定された2つの物理ストッパ中間角度値Kc[deg]を求め、物理被ストッパの現在位置の角度値をX[deg]とし、アームの移動角度をQ[deg]としたとき、QをQ=Kc−Xなる式で求め、Q>0のときには、アームを、他方の回転方向へ前記Qの角度だけ回転させ、Q<0のときには、アームを、一方の回転方向へ前記Qの角度だけ回転させることによりストッパ位置の示唆を行う。
(もっと読む)
移動体の位置決め装置
【課題】水平軸まわりに回動する操作ハンドルを有する移動体の位置決め装置において、操作ハンドル部が回動しているときであっても、操作力入力方向と同一方向に移動体を移動させて移動体の位置決めができる移動体の位置決め装置を提供する。
【解決手段】ベース部22とハンドル部40との間に、平行移動可能な自由度をもたせ、両者間の変位や荷重を検出する際に、検出部材を回動自在とし、検出部材と共に設けられた重力方向保持手段によって重力方向に対して一定方向に保持させることにより、操作ハンドル40bを水平軸まわりに回動させている場合においても、操作力入力の方向と大きさに応じた検出信号出力を、別系統の角度センサ等を用いずに取り出すようにした。
(もっと読む)
吊り型ロボット
【課題】走行レールに対する支柱の設置位置の変更を可能とすると共に、支柱の位置変更の作業を行う際の安全性を確保する。
【解決手段】支柱上に水平に設けられた支持プレート3に走行レール4を取付ける。走行レール4の上面部に、径小な第1円筒部14と径大な第2円筒部15とを一体に備える取付部7を設ける。支持プレート3の先端部に上面から見て円弧状の立下り壁部3aを介して薄肉な被取付部16を設ける。被取付部16に、取付部7の第1円筒部14が開口部から矢印A方向に水平に挿入されるU字状切込み部16aを形成する。第1円筒部14がU字状切込み部16aの奥部まで挿入された状態で、被取付部16の先端部のU字状切込み部16aの開口部両側部分に、第2円筒部15の投影面から露出した一定長さの露出端部16b,16bが生ずる。
(もっと読む)
パワーアシスト装置及びその制御方法
【課題】ワークを目標に合わせる場合は、ブレを補正して目標軌道に沿いやすくするとともに、軌道の変更・修正を行う場合は、ワークをスムーズに移動できるように制御するパワーアシスト装置およびその制御方法を提供する。
【解決手段】操作ハンドル6と、操作ハンドル6に加えられた操作力とその向きθhを検出する力センサ7と、ロボットアーム3と、アクチュエータ11と、を備えるパワーアシスト装置50の制御方法であって、操作力の向きθhが、予め定めた操作ハンドル6の進行方向に対して所定の角度範囲内であると検出された場合には、操作ハンドル6を、操作力の進行方向成分のみを採用して、進行方向Aに沿って進行させるようにアクチュエータ11を駆動し、操作力の向きθhが、前記所定の角度範囲外であると検出された場合には、操作ハンドル6を、操作ハンドル6に加えられた操作力とその向きで進行させるようにアクチュエータ11を駆動する。
(もっと読む)
パワーアシスト装置及びその制御方法
【課題】急停止・急発進に伴うワークの揺れによってワークと相手ワークとが接触することを防止できるパワーアシスト装置及びその制御方法を提供する。
【解決手段】操作ハンドル6と、力センサ7と、ウィンドウ2を保持するロボットアーム3と、ロボットアーム3を駆動するアクチュエータ11と、ロボットアーム3を搬送する搬送手段14と、を備え、搬送手段14を組立ライン上を移動しているボディ100と同期して移動させて、ウィンドウ2をボディ100に組付けるパワーアシスト装置50の制御方法であって、ボディ100の動作状態が、移動状態を継続している通常時には、搬送手段14がボディと同期して移動するように制御し、ボディ100の動作状態が、移動状態から停止状態もしくは停止状態から移動状態へと変化した場合には、ロボットアーム3の駆動を、所定時間の間停止させ、所定時間が経過後、ロボットアーム3の駆動を再開する。
(もっと読む)
ロボットシステム
【課題】本発明の課題は、ケーブル使用量の低減を図れるとともに、安全確実かつ継続的にロボットの運用が可能であり、また、ロボットの組み立て、設置、移設、修理等を簡単に行い得るロボットシステムを提供することにある。
【解決手段】本発明に関わるロボットシステムS1は、動力源60の残りエネルギを求める残エネルギ取得手段70、200と、動作指令に対して、予め準備された仮想モデルに対して動作指令を仮想的に実行することにより、動作指令を実行した場合の消費エネルギを予測するシミュレータB002と、動力源60の残りエネルギとシミュレータB002で予測した消費エネルギとを比較して動作指令を実行可能か否か判断する実行可否判断手段200と、比較判断の結果、動作指令を実行可能と判断した場合に動作指令をロボット110、130、140、150に実行させる実行手段200とを備えている。
(もっと読む)
ロボット
【課題】フラットケーブルを剥き出しで使用しても、他の物体へ干渉することなく、フラットケーブルが損傷しない構造を持つロボットの提供。
【解決手段】ロボット1を形成するアーム8、第1昇降部11および第2昇降部12は鉛直なR軸を中心に旋回可能に形成されている。また、第1昇降部11はアーム8に対して上下移動可能に接続され、さらに第2昇降部12は第1昇降部11に対して上下移動可能に連結されている。第2昇降部12にはワークに処置を施すツールを取り付け可能な回転軸用モータ30が取付けられており、回転軸用モータ30へ電力を供給するためのフラットケーブル32がアーム8から引き出されて回転軸用モータ30へと接続されている。フラットケーブル32のアーム8および第2昇降部12への取付部位の間は下方に垂れ下がっており、第1昇降部11および第2昇降部12がアーム8に対して最も下降した場合に、この垂れ下がり部45は第2昇降部12の下端46よりも上方に位置している。
(もっと読む)
吊り型ロボット
【課題】一対の支柱間に架設された走行レールに旋回アームを有したロボット本体を往復移動可能に吊り下げ支持した構成の吊り型ロボットにおいて、ロボット本体が支柱のごく近くで停止した位置でのアームの旋回範囲を広げる。
【解決手段】一対の支柱のうちの一方の支柱6において、ロボット本体9の移動空間21側の側部に切り欠き部分22を設ける。すると、ロボット本体9が支柱6の直ぐ近くの位置で停止してアームを旋回させた場合、アームが支柱6に当たることなく旋回できる範囲が広がる。
(もっと読む)
ワーク搬送装置
【課題】昇降用の駆動手段および回動動作用の駆動手段といったように、大きく重量大な駆動手段を2種類も備えなくて済み、小型で軽量に構成することができるワーク搬送装置を提供する。
【解決手段】ワークとなるウィンドウ5を把持する把持具20と、把持具20を移動可能に支持する支持アーム10とを備え、把持具20にて把持したウィンドウ5を支持アーム10によりウィンドウ5が組み付けられるウィンドウ枠7a・枠7bまで搬送するとともに、ウィンドウ5の姿勢をウィンドウ枠7a・7bに応じた姿勢に変更するワーク搬送装置1であって、支持アーム10を、複数のリンク11・12・13・14が閉ループ状に接続される閉ループリンク機構に構成し、支持アーム10の把持具20に接続される一対のリンク13・14のうち、何れか一方のリンク13・14に対する把持具20の姿勢を固定可能に構成する。
(もっと読む)
ロボットシステム
【課題】安価且つ簡単な構造により、作業者がステーションの間に設けられた作業者用通路を安全に往来できるロボットシステムを提供する。
【解決手段】ロボットシステムのロボットは、動作用モータ26によって所望の動作を行い、移動用モータ28によって走行路に沿って水平移動する。ロボットシステムは、一つのステーションから作業者用通路を横切って他のステーションへロボットを移動させるときに動作用モータ26への電力供給を遮断するロボット電力遮断装置と、動作用モータ26への電力供給の遮断状態を監視する遮断状態監視装置と、非常停止装置とを備える。非常停止装置は、動作用モータ26への電力供給が遮断されていないことが検出されているときにロボットが作業者用通路の上方の予め定められた区間に侵入すると、移動用モータ28への電力供給を遮断することにより非常停止させる。
(もっと読む)
架空配電線路用作業装置
【課題】ブーム先端の重量増を抑え、さらには操作性を向上させ、安全にマニピュレータを誘導操作することが可能な架空配電線路用作業装置を提供する。
【解決手段】キャビン2と、キャビン2に取り付けられ、その先端に力センサ32を介して複数種の作業工具34を交換して装着可能なマニピュレータ31と、マニピュレータ31の動作を制御する制御装置38とからなり、キャビン2に搭乗したオペレータHがマニピュレータ31を操作して架空電線路に対して作業を行う架空配電線路用作業装置3において、制御装置38は、インピーダンス制御によって力センサ32で検出された外力の方向へマニピュレータ31を動作させる動作指令を生成する動作指令生成部を備え、動作指令生成部は、力センサ32の出力から、オペレータHが作業工具34へ加えた力のみを抽出する操作力抽出部を設けた。
(もっと読む)
2つのロボットアームを有するガントリロボットを用いた重厚長大ワークのハンドリング
作業領域でワークをハンドリングして搬送するためのロボットシステムは、床の上方に支持されるレール(20)と、レールに沿って相互に相対変位及び協調変位可能にレールに支持される少なくとも2つのロボットアーム(50)であって、各アームがワーク(76)を係合支持するために複数の軸を中心に関節動作するロボットアームと、それらロボットアームの各々と通信して各ロボットアームの変位及び関節動作を制御するコントローラ(96)であって、ワークを、各グリッパ(78、80)によって係合し、ロボットアームにより床の上方に持ち上げ、レールに沿って運搬し、ワーク到達点でグリッパから解放するようにするコントローラとを備える。
 (もっと読む)
(もっと読む)
天井走行車システム
【構成】 ロードポート4のピン30aに接触して高さ位置を検出する高さセンサ26と、ピン30cを認識して水平面内位置を認識する画像認識部28とを、ティーチングユニット24に設置する。ティーチングユニット24を天井走行車8の昇降台16で把持して、ロードポート4へ向けて下降させ、高さセンサ26でロードポート4の高さを検出する。次いでティーチングユニット24を微上昇させて、昇降台16の振動周期以上の時間に渡り、ピン30cの水平面内位置を認識して平均化する。
【効果】 ロードポート側にマークを設置するなどの準備無しで、かつ正確にロードポート位置を天井走行車にティーチングできる。
(もっと読む)
1 - 20 / 22
[ Back to top ]