
Fターム[3C007CT05]の内容
マニピュレータ、ロボット (46,145) | コラム (498) | コラムの動作形態 (465) | 垂直軸まわりに回転するもの (178)
Fターム[3C007CT05]に分類される特許
161 - 178 / 178
基板搬送装置およびそれを用いた基板処理装置

【課題】装置の省スペース化を容易に実現できる基板搬送装置およびそれを用いた基板処理装置を提供する。
【解決手段】インデクサロボット6は、第1モータ15の駆動により第1ボールねじ14が回動することで、基台部8を左右方向に移動することができる。また、基板保持ハンド114または124を基板受け渡し位置Sまで進出させる場合には、基台部8が搬送路7と交差する方向に移動して基板受け渡し位置S寄りに位置することで、基板保持ハンド114または124の進出距離を短くすることができるので、第1ロボットアーム11および第2ロボットアーム12の各リンク部材の長さが大きくなるのを防ぐことができる。よって、移動範囲P1を小さくし、基板搬送装置1のフットプリントを小さくして省スペース化を容易に実現できる。
(もっと読む)
回動装置および移載装置

【課題】回動体の回動を適切に規制できる回動装置を提供する。
【解決手段】回動装置2は、ベース体7に対して回動中心軸線Xを中心として回動する回動体3を備える。ベース体7には、回動中心軸線Xを中心とする円周上に互いに間隔をおいて並んで位置する複数の係合凸状体11を設ける。ベース体7には、選択した係合凸状体11と係合する係合凸部21を有するベース側ストッパ体22を取り付ける。回動体3には、ベース側ストッパ体22と当接して回動体3の回動を規制する回動側ストッパ体27を設ける。
(もっと読む)
導電性高分子アクチュエータおよびその駆動方法
【課題】 電解質托体層で電気分解が発生しない条件において応答速度を向上させた導電性高分子アクチュエータ、前記導電性高分子アクチュエータの駆動方法、前記導電性高分子アクチュエータを利用するロボットを提供することを目的とする。
【解決手段】 酸化還元反応により膨張収縮する導電性高分子膜に対して、酸化する場合には電解質托体層の電位窓の上限に相当する電位を、還元する場合には電解質托体層の電位窓の下限に相当する電位を加えるようにする。このようにすることで、電解質托体層に含まれるイオンの移動速度が最大限高まるようになり、電解質托体層で電気分解が発生しない条件において応答速度を向上させた導電性高分子アクチュエータが得られるようになる。
(もっと読む)
レーザ加工用ロボット及びロボットシステム
【課題】 レーザ加工作業中に光ファイバに生じ得る絡みや撓みの問題を解消でき、しかもロボットの外形寸法の増加を効果的に抑制できるレーザ加工用ロボットを提供する。
【解決手段】 マニピュレータ14の腕部28は、第1制御軸44に関して固定配置される第1部材48と、第1制御軸44に関して回転可能に第1部材48に支持され、手首部26を有する第2部材50とを備え、配線通路52が第1及び第2部材の内部に連続して形成される。第1部材には光ファイバ導入口54が設けられ、第2部材の手首部には光ファイバ導出口56が設けられる。レーザ加工ツール18は、第2制御軸46に関して旋回可能な装着部60と、装着部に内設され、光ファイバ22から出射されたレーザ光を反射してノズル部64のレーザ光通路62に導く反射部66とを備え、光ファイバの出力端面22aが、光ファイバ導出口56と反射部66との間に位置決めされる。
(もっと読む)
三次元位置決め装置
【課題】 プローブ、ピンセットあるいはシリンジなどの各種のマニプレータを簡単な操作で且つ高い自由度で位置決めすることのできる簡単な構成の三次元位置決め装置を提供すること。
【解決手段】 基台、この基台に第一の軸により支持され、第一の軸と共にあるいは第一の軸を中心にして独立に回転する第一の回転支持部、第一の回転支持部に、第一の軸に垂直な第二の軸により支持され、第二の軸と共にあるいは第二の軸を中心にして独立に回転する第二の回転支持部、そして第二の回転支持部に、第二の軸に垂直な第三の軸により支持され、第三の軸と共にあるいは第三の軸を中心にして独立に回転する、マニプレータ支持用の第三の回転支持部を含むマニプレータ三次元位置決め装置。
(もっと読む)
基板移送装置
【課題】基板を安定して移送することができ、基板の収納状態も感知することができる 基板移送装置を提供すること。
【解決手段】基板移送装置はハンド130a、130bがピックアップ位置から溝の位置に戻った時、ハンド130a、130bのポケット部132に配置された基板Wを把持する把持部材140を含む。この把持部材140は基板Wのエッジと面接触する湾曲部144aを有し、そして少なくとも一つのハンド130a、130bの移動方向と同一の方向に移動可能に前記ベース上に設けられるプッシャー144及びプッシャー144が基板Wのエッジを側方に押すように弾性力を加える弾性体146を含み得る。
(もっと読む)
位置決めユニット及びこれを用いた位置決めアーム
例えば内視鏡を用いた外科手術において、手術用具を挿入するために人体に開設した穴を押し拡げることなく、かかる手術用具の先端を体内において処置が必要な部位へ位置決めするユニットを提供する。このユニットは手術用具等の可動部材に対して枢動自在に接続されると共に互いに平行に且つ往復動自在に設けられた第1及び第2の出力軸と、この第1の出力軸に対して任意の進退量を与えると共に、前記第2の出力軸に対しては第1の出力軸の進退量と常に一定比率(≠1)の進退量を与える駆動手段とから構成されている。 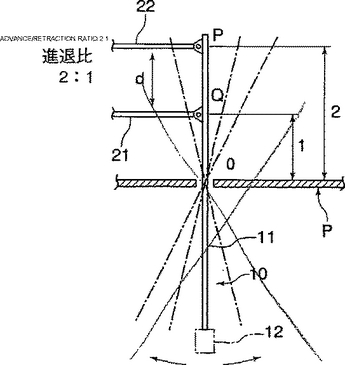 (もっと読む)
(もっと読む)
ロールハンドリング装置
【課題】被製版ロールや印刷ロールを挟持して昇降自在・垂直面内に往復旋回自在・垂直面内に往復旋回自在・搬送自在であることにより、他の装置との間でまたは他の場所へ被製版ロールの受渡しを行える、ロールハンドリング装置。
【解決手段】走行台車装置に装着された旋回台に、昇降台装置を備えた支柱が立設され、昇降台に装着された垂直旋回台に基端を水平アームが固定され、水平アームには水平アームと一体に旋回する一対の挟持アームが互いに接近移動・離隔移動自在に設けられ、一対の挟持アームに一対のロール挟持具を備えている。被製版ロールを、一対のロール挟持具によりロールの面長方向中央部を挟持中心として挟持して昇降自在・垂直面内に往復旋回自在・垂直面内に往復旋回自在・搬送自在であることにより、他の装置との間でまたは他の場所へ被製版ロールの受渡しを行う。
(もっと読む)
ロボット手首機構およびそれに取り付けられたエンドエフェクタ操作方法
【課題】 ロボット動作域に周辺機器等の配置が余儀なくされる場合、第6軸部駆動用モータの存在に基因してロボットの動作に制約が課されないようにする。
【解決手段】 エンドエフェクタ駆動台7は、傾動アーム5から独立した別部品で構成され、基準軸線2とで一平面を形成するように置かれた上下軸線を持つエンドエフェクタ装着部14の周囲に、センタから等距離にある複数の当接面17A,17B,17Cが形成される。傾動アーム5の下端には当接面17A,17B,17Cを着座させることができる接合座5Aが形成され、エンドエフェクタ回転用モータ搭載部15の傾動アーム5に対する位置を変更するとき、エンドエフェクタ装着部14における現用当接面17Aと異なる当接面17B,17Cを接合座5Aに付け替えることによりエンドエフェクタ駆動用モータ9を位置替えし、周囲物との干渉を回避できるようにした。
(もっと読む)
搬送ロボット
【課題】ガラス板の搬送ロボットの回動により、搬送ロボット自身から発生する塵埃を低減して、かつ、ガラス板を含む稼働範囲を狭くすると共にガラス板の可搬送範囲を広くする。
【解決手段】駆動源による駆動アームの回動を、ガラス板を保持するエンドエフェクタを回動可能に支持する従動アームに伝達する回動伝達手段を駆動アームと従動アームとから独立して備えることで、駆動源の上方領域をエンドエフェクタが進退運動により通過できる搬送ロボット。
(もっと読む)
ロボットの寿命時間予測方法、ロボットの動作パターン作成方法、および、それらのプログラム
【課題】 ロボットの寿命が予想外に短くなることを防止できるロボットの寿命時間予測方法を提供する。
【解決手段】 本発明のロボットの寿命時間予測方法は、複数の軸を備えるロボット10が動作可能な寿命時間を予測する方法であって、基準となる基準動作パターンでロボット10を基準寿命時間Tg内に繰り返し動作させたときに発生する前記軸ごとの総トルク量τs1〜τs6を用いて、該基準動作パターンとは異なる任意動作パターンでロボット10を繰り返し動作させたときのロボット10の寿命時間を予測する(ステップS5)ことを特徴とする。
(もっと読む)
多関節ロボットの制御装置
【課題】ロボット本体における軸順序(駆動軸の順序)と駆動装置における軸順序とを容易に入れ替え可能な、多関節ロボットの制御装置を提供する。
【解決手段】複数の駆動軸を有するロボット本体5を制御する多関節ロボットの制御装置11において、ロボット本体5における少なくとも位置および角度を算出するロボット機構計算部1と、ロボット本体が具備する複数の駆動軸の軸順序を入れ替え可能な軸入れ替え部2とを有し、前記軸入れ替え部2を介して前記ロボット機構計算部1によりロボット本体5が具備する複数の駆動軸を制御するようにした。これにより、従来使用していた駆動装置4を用いながらも、ロボット本体5における駆動軸間のサーボモータの入れ替えに容易に対処できるものとなる。
(もっと読む)
産業用ロボット
【課題】ロボットの第1アームとワークや治具の干渉が少ない産業用ロボットを提供する。
【解決手段】 ロボットの第1アーム9を、旋回部4に対して回動する方向に、かつ第1アーム9と第2アーム12の内角と反対方向に湾曲させることにより、ロボットが治具16上に保持した箱形状のワーク17の内側で作業を行う場合、湾曲したアームの凹空間13において、干渉点18との干渉を避けることができ、ワーク底面19まで作業することができるので、従来のロボットのワーク内作業領域に比べ、広いワーク内作業領域20を確保することができる。
(もっと読む)
ロボットの手首部並びに傾動ハウジングを備えているこのロボットの手首部を構成する方法
【課題】
【解決手段】ロボットのアーム部(5)のためのロボットの手首部(7)は、第1の軸(C)を中心として回転するように配置された傾動ハウジング(8)を有し、更に、この傾動ハウジング(8)が第1の軸(C)を中心として回転するようにさせる第1のモータ(10)及び第1のギアアセンブリ(11)を有しており、そして、第1のモータ(10)の出力シャフト(15)が、第1の軸(C)と同軸となるように配置されている。  (もっと読む)
(もっと読む)
基板搬送装置
【課題】 本発明は搬送構造を改善した基板搬送装置を提供する。
【解決手段】 本発明による基板搬送装置は、ベース部20と;ベース部20上に直線運動ができるように設置されて、回転体32が備わっている運動部30と;運動部30の両側に並立設置されて、高さ調節が可能な一対のフレーム部40a、40bと;一対のフレーム部40a、40bの間に連結されて、フレーム部40の高さ調節動作に連動して、上下直線運動する搬送部50と;を含んで構成される。これにより、構造的な安全性を確保した状態で、簡便で精密に基板、特に大型基板を搬送させることが可能になる。
(もっと読む)
2つの部分から構成される遠隔操作アーム
本発明の遠隔操作アームは主アーム(5)及び従アーム(1)を備え、それら2つのアームは互いに機械的に分離されており、且つ、制御ユニット(7)と、従アームを駆動させるための機械ユニット(8)とを有するインターフェースシステム(6)によって連結されている。本発明によれば、機械ユニット(8)は、固定モータと、従アームの水平部分の管状セグメント(3)を少なくとも完全に1回転させて作業負荷を増大させる伝達装置とを有している。
選択図 図1  (もっと読む)
(もっと読む)
遠隔操作される流体圧アームを備えた、隔室領域で対象物を操作する装置
【課題】ガラス固化装置の危険な隔室領域で、目標対象物を操作・加工するのに適用することができる種々の装置を提供する。
【解決手段】目標対象物を操作する方法および装置を開示し、マニピュレータ(23)は、トロリ−(13)に固定される基礎(23)と、使用者が遠隔操作できるように基礎(23)に搭載された流体圧ア−ム(24)とを備えている。アーム(24)は、基礎(23)から離れた端部に、目標対象物に作業を施すための種々の工具を取り付けるように配設された工具連結具(25)を具備している。
(もっと読む)
ワーク搬送用ロボット
【課題】アームの熱膨脹収縮により生じるハンド部材の偏位量を許容範囲内に収めることができるアーム回動形のワーク搬送用ロボットを提供する。
【解決手段】固定プーリ8,27と、一端が固定プーリ8,27に対して回動自在に支持されたアーム13,26と、アーム13,26の他端に回転自在に支持された回転プーリ15,29と、固定プーリと回転プーリとの間に張設されたベルト17,30とを備えたアーム機構を多段に設けて、最終段のアーム機構の回転プーリ29にハンド部材40を取り付けたワーク搬送用ロボットにおいて、アーム13,26の熱膨脹収縮によりハンド部材40に生じる偏位を許容範囲に収めるように、テンションローラ22,35からベルト17,30に与える張力を調整するようにした。
(もっと読む)
161 - 178 / 178
[ Back to top ]