
Fターム[3C007CT05]の内容
マニピュレータ、ロボット (46,145) | コラム (498) | コラムの動作形態 (465) | 垂直軸まわりに回転するもの (178)
Fターム[3C007CT05]に分類される特許
81 - 100 / 178
搬送装置
【課題】真空雰囲気下で加熱された板状ワークを搬送する場合において、当該ワークからの熱による不都合を解消ないし低減する。
【解決手段】搬送装置Aは、固定ベース1と、固定ベース1に対して旋回可能に支持された旋回ベース2と、旋回ベース2に支持され、ガイドレール32A,32Bを含んで構成された直線移動機構3と、ガイドレール32A,32Bに支持され、直線移動機構3の作動によりワークWを水平直線状の移動行程に沿って搬送するハンド4A,4Bとを備える。ハンド4A,4Bとガイドレール32A,32Bとの間には熱反射板8が設けられる一方、固定ベース1および旋回ベース2には、固定ベース1側と旋回ベース2側とを常に連通させる空間502,602を含んで構成された冷媒循環路が設けられている。上記冷媒循環路は、上記熱反射板8に接するように取り回された冷却管71,73,74,76を含む。
(もっと読む)
双腕型ロボットマニピュレータ

【課題】本発明は、マニピュレータの設置位置を変えることなく上部及び前方からのアプローチを可能にした双腕型ロボットマニピュレータを提供する。
【解決手段】旋回軸J8上に配置された胴体1と、前記胴体1に備えられた右腕2Rおよび左腕2Lと、前記右腕2Rおよび前記左腕2Lが複数の関節軸J1〜J7で構成された双腕型ロボットマニピュレータにおいて、前記右腕2Rおよび前記左腕2Rの第1の関節軸J1が前記胴体1の前方に配置されたものである。
(もっと読む)
産業用ロボット及び集合処理装置
【課題】各アームを独立して動作させるとともに、各アームの上下方向の座標位置を同じにして、ワークの搬送時間等を短縮することができる産業用ロボットを提供する。
【解決手段】基台部100側からアーム部2及びハンド部3の順で連結され、そのハンド部3を所定方向に向けながら伸縮自在に動作するアーム10を2つ以上有する産業用ロボットであって、アーム10A,10Bそれぞれは、アーム伸縮軸2A,2Bを回動中心としてアーム10A,10Bを伸縮させるアーム伸縮用駆動源4A,4Bと、アーム旋回軸3A,3Bを回動中心としてアーム10A,10Bを旋回させるアーム旋回用駆動源5A,5Bと、ハンド部12の上下方向の座標位置P1,P2をほぼ同じにする連結部材13A,13Bとを備えるように構成して、上記課題を解決した。
(もっと読む)
把持候補位置選出装置、把持候補位置選出方法、把持経路生成装置、および把持経路生成方法
【課題】教示作業に要する時間を短縮することができる把持候補位置選出装置を提供する。
【解決手段】ワークの形状モデルを構成する複数の形状片に対して、法線ベクトルをそれぞれ計算する法線ベクトル計算手段と、複数の形状片のなかから、計算される法線ベクトルの内積が閾値以下であって、かつ、一の形状片の法線から他の形状片までの距離が許容範囲内に含まれる形状片の対を、ロボットハンドによる把持候補位置として選出する候補位置選出手段と、を有する。
(もっと読む)
双腕型ロボットマニピュレータ
【課題】本発明は、マニピュレータの設置位置を変えることなく上部及び前方からのアプローチを可能にした双腕型ロボットマニピュレータを提供する。
【解決手段】旋回軸J8上に配置された胴体1と、前記胴体1に備えられた右腕2Rおよび左腕2Lと、前記右腕2Rおよび前記左腕2Lが複数の関節軸J1〜J7で構成された双腕型ロボットマニピュレータにおいて、前記右腕2Rと前記左腕2Lは、全て共通のアーム体で構成されたものである。
(もっと読む)
取扱マニピュレータ装置
【課題】汎用的に適用可能で、特に好適には工作機械に前面入口から加工材または工具を送給または取り出すことに適する取扱マニピュレータ装置を得る。
【解決手段】取扱マニピュレータ装置1に、垂直方向に延在し垂直軸線の周りに回転可能な主支持体2と、垂直方向に移動可能な垂直キャリッジ9によって主支持体2に支持した水平伸展アーム12および、直接的または間接的に水平伸展アーム12に支持したグリッパ18を設け、水平伸展アーム12をリニアガイドによって水平方向に移動可能に垂直キャリッジ9に支持し、水平伸展アーム12に垂直軸線15の周りに回転可能な関節連結アーム14を設け、この関節連結アーム14の端部にグリッパを設ける。好適には、主支持体2を水平方向に移動可能な主キャリッジ5上に固定する。
(もっと読む)
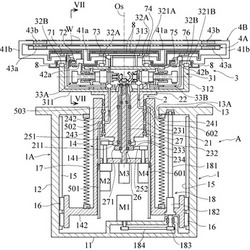
搬送装置
【課題】昇降動作のストローク量を大きく確保するとともに装置全体の高さを低く抑えることができる、低床型の搬送装置を提供する。
【解決手段】固定ベース1と、旋回ベース2と、この旋回ベース2を固定ベース1に対して昇降させる昇降機構3と、旋回ベース2を鉛直状の旋回軸Os周りに旋回させる旋回機構と、旋回ベース2に支持された直線移動機構5と、直線移動機構5に支持され、直線移動機構5の作動によりワークWを水平直線状の移動行程に沿って搬送するハンド6A,6Bとを備えた搬送装置Aであって、昇降機構3は、固定ベース1に対してテレスコピック状に伸縮するように組み合わされた2段の昇降部材31,32と、各段の昇降部材をその下位段の部材に対して昇降させる第1および第2の昇降駆動機構33,34と、を備えて構成されており、かつ、旋回ベース2は、最上位段の昇降部材32に支持されている。
(もっと読む)
複数の独立可動関節アームを伴う基板搬送装置
少なくとも1つの駆動軸を有する駆動部と、少なくとも1つの駆動軸に動作可能に連結される少なくとも2つのスカラアームと、を有する基板搬送装置であって、少なくとも1つの駆動軸は、少なくとも2つのスカラアームの伸長および収縮を生じさせる少なくとも2つのスカラアームのための共通駆動軸であり、少なくとも2つのスカラアームは、少なくとも2つのスカラアームに連結される少なくとも1つの駆動軸によって、駆動軸の回転が、少なくとも2つのスカラアームのうちの別の1つの運動に実質的に関係なく、少なくとも2つのスカラアームのうちの1つの伸長および収縮を生じさせるように、互いに連結される。  (もっと読む)
(もっと読む)
基板搬送装置及びケーブル配線構造
【課題】 回転部材にケーブルを配線する際に,ケーブルを構成する各線条体にかかる負荷を抑えつつ,回転部材の回転に伴ってケーブルが動いた場合の擦れ合いや絡み合いを防止し,ケーブルの配線スペースをより省スペース化できる。
【解決手段】 ケーブルを収容するケーシング110と,ケーシング内の上方に鉛直軸回りに相対的に回転可能に配設された回転板126と,帯状に配列された複数本の線条体を相互に接合して一体化してなり,各線条体が鉛直方向に配列するように回転板に配線されるフラット状のケーブル200とを備え,ケーブル200は,その一端を回転板の回転中心からずれた位置に取付けて,そこから下方に向けて徐々に巻径が広がる螺旋状になるように,その他端をケーシングに取付けた。
(もっと読む)
動作支援装置およびその制御方法
【課題】安全性が高く、かつ人間的なスムーズな動きを再現して上肢の動作を好適に支援すると共に、多様な場面で使用者の利便に供し、高いリハビリ効果の期待できる動作支援装置およびその制御方法を提供する。
【解決手段】使用者の上肢の動作を検出する第1検出手段30と、上肢の位置および姿勢を検出する第2検出手段14a、16a、18a、20aとを有し、これら各手段からの情報によって制御下に作動するマニピュレータ12を備え、このマニピュレータ12の先端は使用者の上肢が離間自在であり、該マニピュレータ12を第1検出手段30および第2検出手段14a、16a、18a、20aからの情報でフィードバック制御することで、上肢の動作を好適に支援する。
(もっと読む)
放射線治療システム
【課題】放射線治療システムにおいて、治療台の干渉を回避して安全性を向上させると共に、治療効率を向上させること。
【解決手段】放射線治療システム10は、治療用放射線を照射する照射ノズル11と、多関節ロボットで構成され且つ患者を乗せて照射ノズル11から照射される治療用放射線の照射位置に患者13の患部を位置決めする治療台12と、照射ノズル11及び治療台12を制御する制御部と、制御部に制御信号を入力する操作装置20と、操作装置20の操作者19の位置を検出する位置検出手段を備える。制御部は、位置検出手段で検出した操作者19の位置を基に当該操作者19との干渉を回避する移動経路を算出する経路算出装置42と、経路算出手段で算出した移動経路を基に治療台12の移動を制御する治療台制御装置42とを備える。
(もっと読む)
作業用マニピュレータの制御装置
【課題】特異点に接近もしくは通過するような目標軌道を与えられた場合でも、計算上の破綻なく連続してマニピュレータを動作させて作業を続行可能とする。
【解決手段】作業用マニピュレータの制御装置は、目標値生成手段101、感度パラメータ計算手段103、対応感度計算手段105、複数の制御手段109〜113、制御方式切替手段107、及び外力検出手段を備える。感度パラメータ計算手段103はマニピュレータ機構からの関節変位応答を用いて感度パラメータを計算し、対応感度計算手段105は感度パラメータを用いて対応感度を計算し、制御方式切替手段107は対応感度に基づいて制御手段109〜113の切り替えを行う。各制御手段109〜113は、目標値、関節変位応答、外力検出手段で検出された外力、及び感度パラメータを用いて制御処理を行う。
(もっと読む)
多関節ロボット
【課題】本発明は上下移動軸からの発塵による基板の汚染を防止するとともに、生産性を向上させた液晶用のガラス基板や半導体ウェハ等の薄板状のワークをストッカに出し入れする多関節ロボットを提供する。
【解決手段】搬送物を載置するハンド部(8)と、前記ハンド部(8)と連結され、少なくとも2つ以上の回転関節(3)、(4)、(5)を備え、前記ハンド部(8)を1方向に移動するように伸縮し、軸方向に対向するように配置された多関節アーム(1)と、前記多関節アーム(1)と上下に移動する移動機構(11)とを連結する支持部材(10)と、前記移動機構(11)に備えられた旋回機能を有する台座(13)とからなる多関節ロボット(1)において、前記移動機構(11)は、前記ハンド部(8)の移動方向と同方向にコラム(12)が配置され、前記移動機構(11)に配置された支持部材(10)は、前記ハンド部(8)の移動方向に直交する方向に突出し、前記多関節アーム(2)と連結されたものである。
(もっと読む)
日常生活支援マニピュレータ装置
【課題】日常生活で、自らの腕のように操作できる小型、軽量、安全な日常生活支援マニピュレータ装置を実現する。
【解決手段】互いに多関節状に接続される複数のアーム構成要素は、平行リンクを構成する駆動リンク6、12および従動リンク5、11を備えたアーム構成要素を含み、駆動リンク17を備え従動リンクを備えていないアーム構成要素を含み、駆動リンク6、12、17および従動リンク5、11は、それぞれ両端が、支持体3、9、15、20に回転可能に取り付けられており、駆動リンク6、12、17は、その一端において回転軸を介して支持体3、9、15に付設されたモータにより駆動され、従動リンク5、11や駆動リンク17には、支持体9、15、20との間でバネ8、14、19が装着されていることを特徴とする日常生活支援マニピュレータ装置29を提供する。
(もっと読む)
旋回軸を含む多軸の搬送ロボット
【課題】 旋回軸等を含む多軸の搬送ロボッハンドを容易に直線的に動作させるため直交ロボットをアームとしたために起きる装置が大型化し、取り回しが困難と成るという欠点を取除き、旋回半径が小さいアームを有する搬送ロボットを提供すること。
【解決手段】 旋回軸等を含む多軸の搬送ロボットにおいて、搬送物を載せるハンドを駆動するアームは2個のステージ有し、一側はハンドに、他側は1個の軸に固着した直交ロボットであることを特徴とする旋回軸等を含む多軸の搬送ロボットとした。
(もっと読む)
基板処理システム、基板搬送装置、基板搬送方法、および記録媒体
【課題】搬送中における基板に対して適切な処置を施すことができる基板搬送装置を提供する。
【解決手段】基板搬送装置50は、第1基板収容部20と第2基板収容部30との間を移動可能なフォーク支持体51と、フォーク支持体に移動可能に支持されたフォーク60,65と、を備える。フォークは、第1基板収容部から第2基板収容部へ搬送される基板を第1支持位置において支持し、第2基板収容部から第1基板収容部へ搬送される基板を第1支持位置とは異なる第2支持位置において支持する。第1支持位置に基板を支持したフォークは、フォーク支持体の移動中に第1待機位置に配置され、第2支持位置に基板を支持したフォークは、フォーク支持体の移動中に第1待機位置とは異なる第2待機位置に配置される。
(もっと読む)
日常生活支援ロボットアーム装置
【課題】日常生活で、自らの腕のように操作できる小型、軽量、安全な日常生活支援ロボットアーム装置を実現する。
【解決手段】互いに多関節状に接続される複数のアーム構成要素は、平行リンクを構成する駆動リンク6、12および従動リンク5、11を備えたアーム構成要素を含み、駆動リンク17を備え従動リンクを備えていないアーム構成要素を含み、駆動リンク6、12、17および従動リンク5、11は、それぞれ両端が、支持体3、9、15、20のいづれかに回転可能に取り付けられており、駆動リンク6、12、17は、その一端において回転軸を介していづれかの支持体3、9、15に付設されたモータにより駆動され、従動リンク5、11や駆動リンク17には、いづれかの支持体9、15、20との間でバネ8、14、19とダンパー26、28、30が装着されていることを特徴とする日常生活支援ロボットアーム装置35を提供する。
(もっと読む)
ロボットとロボットの制御装置および制御方法
【課題】 ロボットが動作するときの力を適切に制限する。
【解決手段】 ロボットは、複数のリンクが関節を介して接続されているロボット本体と、ロボット本体の関節を動かすモータと、モータに通電している電流を計測する電流計測手段と、ロボット本体の静止時に電流計測手段によって計測された電流値に基づいて、モータに通電する電流の上限値を設定する上限値設定手段と、上限値設定手段によって設定された上限値以下の範囲で、モータに通電する電流を調節するモータ駆動手段を備える。
(もっと読む)
基板吸着装置およびそれを用いた基板搬送ロボット
【課題】吸着力を保持しながら基板の変形に追従するとともに、外力が開放されたとき(基板開放時)に元の位置に戻る復元力を有し、安定的な基板吸着装置およびこれを用いた搬送ロボットを提供する。
【解決手段】基板吸着部141を有する中空の吸着パッド14と、この吸着パッド14を弾性的に支持する弾性部材からなるパッド支持部材15と、エア吸着力を発生する基板吸着部141とを備えた基板吸着装置13において、
摩擦低減機構を有するマニホールド16と、前記吸着パッド14と前記マニホールド16との間に弾性体18を備えたものである。
(もっと読む)
基板移載装置
【課題】フォトマスク等の基板の移載が容易に行える基板移載装置を提供する。
【解決手段】本発明による基板移載装置100は、ベース部111に固定されたシャフトを中心に回転可能な回転胴部112と、回転胴部112の側面に上下動可能に取り付けられたアーム部120と、アーム部120の先端部に水平方向に回転可能に取り付けられた把持部130とを備える。把持部130は、上下動可能な下側把持爪133と上側把持爪134とによって、移載対象となる基板を垂直に立てた状態で上下方向に把持する。更に、把持部130は、垂直に立てた状態で把持されている基板に垂直な軸を中心に微小角度回転することができ、基板の重さでアーム部120がたわんで把持部130が傾いてしまうような場合にも、基板を水平に保持することができる。
(もっと読む)
81 - 100 / 178
[ Back to top ]