
Fターム[3C007CT05]の内容
マニピュレータ、ロボット (46,145) | コラム (498) | コラムの動作形態 (465) | 垂直軸まわりに回転するもの (178)
Fターム[3C007CT05]に分類される特許
141 - 160 / 178
ロボット教示装置及び方法
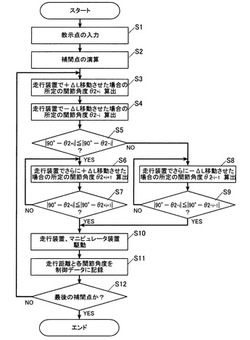
【課題】 ロボットの教示の際のアーム同士の特異姿勢の発生を回避する。
【解決手段】 複数のアーム、関節及び駆動源を備えるマニピュレータ装置10と走行装置20とを備えるロボット1の教示装置30において、教示点入力手段37と、入力教示点に基づく複数の移動目標位置T1ごとにマニピュレータ装置の先端部14を位置決めする際に、第二の関節13bが屈曲状態を維持した状態での走行装置の走行方向及び走行距離を求める走行距離算出手段と、当該求められた走行方向及び走行距離を反映させてロボットの制御データを生成するデータ生成手段とを備えている。
(もっと読む)
ウェーハの搬送装置

【課題】ウェーハアライメント専用装置やウェーハアライメント用のアクチュェータを使用せずに、フットプリントを最小に抑えて、低発塵でかつ、高スループットなアライメント機能を有するウェーハの搬送装置を提供する。
【解決手段】ウェーハを把持するウェーハ把持部41と、前記ウェーハ把持部41を支持するアーム部40と、機台1とを有し、前記機台1は、機台座10と、前記アーム部40を固定支持し、かつ前記機台座10に対して回転自在なる旋回基軸3とを有し、前記ウェーハ把持部41は、前記ウェーハのノッチやオリフラを含む基準位置を検知する位置検知センサ5を有し、前記ウェーハが載置されるウェーハ置台11を前記旋回基軸3が回転する回転軸心上に位置するように前記機台1に設けた。
(もっと読む)
荷受装置及び運搬機械
【課題】 荷物の傾きを補正可能な荷受装置及び運搬機械を得る。
【解決手段】 運搬機械本体のツール支持部に取り付けられる基体21と、基体21に水平軸J6まわりに傾動可能に取り付けられ、荷物を支持する荷受体22とを備え、移動体32及び案内体33からなる一対の直動案内31,31を、水平軸J6から離れた位置で、移動体32の移動方向における互いの間隔が連続的に変化するように、一方を他方に対して傾斜させた状態で基体21及び荷受体22にそれぞれ取り付け、該一対の移動体32,32間を連結体34,35で連結し、該連結体に取り付けられたナット36に係合するねじ軸37を駆動装置M5により回動させて、連結体34,35を案内体33,33に沿って移動させることにより、荷受体22を水平軸J6まわりに傾動させ、荷受体22に支持された荷物を略水平に支持する。
(もっと読む)
小型移載機
【課題】直動する距離以外の移動体の長さや余裕長さが不要であり且つ静粛性に優れた小型移載機を提供すること。
【解決手段】水平方向の進退動作と、水平面内での旋回動作が可能なロボットハンド130を有する小型移載機において、前記ロボットハンドは、駆動アーム160の揺動によって、水平方向の進退動作が行われ、回転テーブル110下側に前記回転テーブルと同軸上に水平駆動用モータ150と干渉しない位置に固設された半円強の旋回用ギヤ170と、旋回駆動用モータ190の回転軸に固設された駆動用ギヤ180との噛み合いにより水平面内での旋回動作が行われる構成としたことにより、上記課題を解決する。
(もっと読む)
ロボット制御装置,ロボット制御方法,コンピュータプログラム
【課題】 ロボットが使用される状況に応じて要求される条件を考慮することで、アーム先端を目標位置に移動させるために必要な走行軸の移動量を自動的に決定することができるロボット制御装置を提供する。
【解決手段】 ロボットの制御を行うコントローラは、垂直多関節型で6軸のアームの先端について、現在位置(X0,Y0,Z0)と所定時間後の目標移動量(ΔX,ΔY,ΔZ)とに基づいて決定される目標位置(Xc,Yc,Zc)に対し(ステップS1〜S4)、その時点でアームが保持している第2関節角度θ2と第3関節角度θ3との和が一定となることを拘束条件として、アームの先端を目標位置に移動させるために必要な走行軸上における所定時間当たりの移動量ΔX3を計算する(ステップS5)。
(もっと読む)
エネルギ案内ユニットを案内する案内ユニット及び案内装置
【課題】 構造的に簡単な手段により実現可能なエネルギ案内ユニットを案内する案内ユニット及び案内装置を提示する。
【解決手段】 定置接続部(2)及び可動接続部(3)を持つエネルギ案内ユニット(1)を案内する案内ユニットにおいて、案内ユニットが互いに実質的に同心的に設けられる内側案内通路(7)及び外側案内通路(8)を持ち、両方の案内通路(7,8)が分離ユニット(10)により互いに分離され、内側案内通路(7)が内側区画壁(9)を持ち、外側通路(8)が外側区画壁(11)を持ち、分離ユニット(10)が外側区画壁(11)又は内側区画壁(9)より小さい高さを持っている案内装置は、定置接続部(2)と可動接続部(3)及び定置接続部と可動接続部との間で三次元的に偏向可能な少なくとも1つの範囲を持つ少なくとも1つの三次元的に偏向可能なエネルギ案内ユニット(1)及び案内ユニットを含んでいる。
(もっと読む)
産業用ロボット
【課題】 ケーブルにおける過度の弛みおよび張りを防いで、ケーブルの寿命を延ばすとともに、アームの可動範囲を広げることができる産業用ロボットを提供する。
【解決手段】 カバー体61がケーブル22を覆い、ケーブル保持部51が手先第1軸線L1まわりに角変位自在に設けられる。また第3手首可動部42に連結されて、ケーブル22が緩やかに挿通するケーブル案内部52を有する。これによってケーブル22が手先基部39から大きく突出することがなく、弛んだケーブル22が周辺機器に干渉することを防ぐことができる。これによってケーブル22の寿命を延ばすとともに、狭い領域にロボットを配置することができる。また、ケーブル案内部52の挿通孔をケーブル22が挿通することによって、ケーブル案内部52に対してケーブル22が移動することが許容され、ケーブル22が過度に張ることを防ぐことができる。
(もっと読む)
搬送装置、搬送ロボット及びプレスライン
【課題】 搬送対象物の姿勢を自由に変更可能であり搬送対象物の搬送速度を向上させることができる搬送装置、搬送ロボット及びプレスラインを提供する。
【解決手段】 カム型3fのような障害物がプレス機械3に設置されている場合には、搬送対象物Wの姿勢を同一にして搬送すると搬送対象物Wがカム型3fと干渉して搬送対象物Wを搬送することができない。このため、先ず、スライド駆動モータがアーム部9を個別にスライドさせて、アーム部9をB1方向に前進させプレス機械3内でクランプ部8に搬送対象物Wを保持させる。その後に、搬送ロボット5のT軸駆動モータが駆動軸5mを回転させて、アーム部9と一体となってガイド部11をA方向に回転させるとともに、回転駆動モータがクランプ部8を個別に回転させて搬送対象物Wを回転させる。その結果、搬送対象物Wの姿勢が変化するため搬送対象物Wとカム型3fとの干渉が回避される。
(もっと読む)
産業用ロボットの減速装置
本発明の課題は、最適な負荷容量の主軸受を用いつつも、中心部に貫通穴を設けその中に線状体を配線しロボット各軸の動作範囲についての制約を大幅に緩和することが出来る、低コストな減速装置を提供する。本発明によれば、ロボット基台に対し位置固定された大ギアと、前記大ギアとかみ合いかつ旋回胴部内に軸支された小ギアを持つ旋回軸(第1軸)減速装置において、前記大ギアと前記小ギアを、第2軸(前後軸)の回転平面の近傍に配置し、また、ロボット基台に軸支された小ギアと、前記小ギアとかみ合い旋回胴部に対し位置固定された大ギアを持つ旋回軸(第1軸)減速装置において、前記大ギアと前記小ギアを、第2軸(前後軸)の回転平面の近傍に配置した。  (もっと読む)
(もっと読む)
搬送装置およびスパッタリング装置
【課題】搬送効率を向上させ得る搬送装置を提供する。
【解決手段】ベース部31を回動させるモータ32と、ベース部31の中心部に挿通された中心軸33を回動させるモータ34と、基材101を保持可能に構成されると共に中心軸33に対して接離する方向に沿ってスライド可能にベース部31に配設されたスライダ35a,35bと、中心軸33の回動に応じてスライダ35a,35bをスライドさせるリンク機構とを備えている。これにより、基材101を搬送する効率を向上させることが可能となる。
(もっと読む)
加工搬送装置
【課題】関節駆動系の部品を取り外すことなく、アーム片を交換することができる加工搬送装置を提供する。
【解決手段】加工搬送装置1は、複数の関節を有する可動アーム2の基端をベースプレート16に装着するとともに、可動アーム2の先端に加工又は保持手段を設けてある。アーム片90の本体部91は、モータ97を収容するモータハウジング92とモータ取付用ブラケット93にボルト96,110で締結固定してある。
(もっと読む)
加工搬送装置
【課題】可動アームの移動範囲を広くし、可動アームの動作の自由度を高めることによって、ワークの加工条件の制約を緩和することができる加工搬送装置を提供することを目的とする。
【解決手段】加工搬送装置1は、可動アーム2の関節の回転軸5,6,7に対して垂直な回転軸14を中心として可動アーム2を回動させるべく可動アーム2の基端とベースプレート16との間に設けた第1の回動手段15と、該回動手段15の回転軸14と関節の回転軸5,6,7の双方に対して垂直な回転軸19を中心として可動アーム2を回動させるべく可動アーム2の基端側アーム片11に設けた第2の回動手段20とを備えている。
(もっと読む)
ダイレクトドライブモータ
【課題】
雰囲気汚染を回避しながらも、高精度にロータの回転角度を検出でき、更に信頼性を確保できるダイレクトドライブモータを提供する。
【解決手段】
隔壁13の円板部13aの肉厚が、円筒部13bの肉厚より厚くなっているので、寸法精度や機械精度および温度変化に起因して、隔壁13に変形が生じた場合でも、薄肉の円筒部13bが先に変形することで、隔壁13の軸方向応力や曲げ応力を緩和することができ、それによりシール不良や破壊などを防ぐことができる。
(もっと読む)
ロボット
【課題】 アームに接続される長尺部材が、基台の固定部に対する基台の可動部の回転に起因する摩擦によって損傷および破損してしまうという不具合を防ぐことができるロボットを提供する。
【解決手段】 塗装ロボット1は、基台4に旋回自在に設けられるアーム3の先端部8に塗装ガン9が装着され、この塗装ガン9を予め定める位置および姿勢に配置して、ワーク2の塗装作業をする。前記基台4は、予め定める設置位置に設置されて固定される固定部5と、アーム3の基端部7に固定され、固定部5に対して回転軸線Lまわりに回転駆動される可動部6とを有する。アーム3に接続される長尺部材17は、固定部5の固定側案内部21によって形成される固定側内部空間22および可動部6の可動側案内部24によって形成される可動側内部空間25を、回転軸線Lに沿って緩やかに挿通する。
(もっと読む)
ロボットステーション
【課題】 ワークを搬送するアームおよびハンド部の動作範囲に死角が生じないようにし、全方位に等しくワークを送り出し尚かつどの方位の作業ステーションからもワークを受け取ることができるようにする。
【解決手段】 ロボット移動ステーション1を中心として各作業ステーション2がワーク10に対し組立・加工・洗浄等の各工程が行われる各作業ステーション2にワーク10を送り出しあるいは各作業ステーション2からワーク10を受け取り又はワーク10に対して作業を行う産業用ロボットMを載置する回転テーブル5と、回転テーブル5の中央に配置され、これと一体となって回転可能な回転軸3と、回転軸3近傍に配置した回転軸3を回転させる回転軸用駆動装置4とを備え、回転テーブル5を中心として各作業ステーション2がその周囲に配置されるとともに、産業用ロボットMは、回転テーブル5とは独立の駆動ユニットとなっている。
(もっと読む)
基板移載ロボット装置
【課題】
静止状態にある矩形基板を保持し、直進動作で別の位置へ搬送を行なう場合、基板移載ロボット装置上において、基準位置と基板の横方向(X方向)の位置ズレを検出し、搬入時に位置ズレを補正する技術を提供すること。
【解決手段】
静止状態にあるガラス基板Wを保持し搬送を行なう基板移載ロボット装置1であって、ハンドH1、H2の移載面上にガラス基板が位置し、且つロボット上での待機位置に移動した状態において、ロボット装置上の基準位置と基板位置との位置ズレ値を検知するセンサを基部100に備え、搬入時の駆動制御を行なう。
(もっと読む)
多関節ロボットのツール位置補正方法
【課題】 多関節ロボットのツールの位置ズレを補正して移動位置精度を向上させる。
【解決手段】 ロボットハンド21のハンド位置設定点Hを任意の補正基準位置m1に移動し、指標5bのツール位置座標と基準オフセット量とを算出する。ロボットハンド21を補正基準位置m1を中心に所定角度回転させて指標5bのツール位置座標を求め、このツール位置座標と基準オフセット量とから、その回転位置に対応した基準補正位置m2を求める。この基準補正位置m2と基準補正位置m1との間の距離(Xr2,Yr2)がロボットハンド21の回転時に発生する位置ズレ量であり、補正データとして記憶される。視覚センサによって検出されたワーク5の位置にロボットハンド21を移動させる際には、ロボットハンド21の回転角度に対応した補正データを読み出し、この補正データによって指標5bのツール位置座標を補正する。
(もっと読む)
基板搬送装置およびそれを用いた基板処理装置
【課題】装置の省スペース化を容易に実現できる基板搬送装置およびそれを用いた基板処理装置を提供すること。
【解決手段】インデクサロボット13には、第1ロボットアーム16および第2ロボットアーム17が備えられており、第1ロボットアーム16および第2ロボットアーム17は、いわゆる3リンク方式とされている。これにより、第1ロボットアーム16および第2ロボットアーム17を延ばした状態では、必要なリーチの長さを確保できる。よって、これらを折りたたんだ状態においては、インデクサロボット13の占有面積を小さくすることができる。よって、回転昇降台を回転させた場合のインデクサロボット13の旋回直径L1および移動範囲P1を小さくすることができ、基板搬送装置1のフットプリントを小さくして省スペース化を容易に実現できる。
(もっと読む)
アーク溶接ロボットのトーチケーブル処理構造
【課題】 トーチケーブルの挙動を安定に保ち、干渉を最小に抑えたトーチケーブル処理構造を、天吊り方式/壁掛け方式のアーク溶接ロボットで実現する。
【解決手段】 ロボットベース15を天井部100に設置し、前腕基部10に第1軸線Aの回りで回転可能に第1手首要素11を設け、同第1手首要素11に、第2軸線Bの回りで回転可能に第2手首要素12を設け、伝動機構13を介して溶接トーチ2をオフセットされた軸C回りで回転可能に支持する。溶接トーチ2は、図示したロボット姿勢で先端が下方を向くように取付けられる。支持ベース5を介してリニアガイド6a、スライダ7を設け、トーチケーブル3の中途部(または溶接ワイヤ送給装置4)を固定し、張力発生装置80で引き寄せる。壁掛け方式のロボットにも適用できる。
(もっと読む)
基板搬送装置およびそれを用いた基板処理装置
【課題】装置の省スペース化を容易に実現できる基板搬送装置およびそれを用いた基板処理装置を提供する。
【解決手段】インデクサロボット6は、第1モータ15の駆動により第1ボールねじ14が回動することで、基台部8を左右方向に移動することができる。また、基板保持ハンド114または124を基板受け渡し位置Sまで進出させる場合には、基台部8が搬送路7と交差する方向に移動して基板受け渡し位置S寄りに位置することで、基板保持ハンド114または124の進出距離を短くすることができるので、第1ロボットアーム11および第2ロボットアーム12の各リンク部材の長さが大きくなるのを防ぐことができる。よって、移動範囲P1を小さくし、基板搬送装置1のフットプリントを小さくして省スペース化を容易に実現できる。
(もっと読む)
141 - 160 / 178
[ Back to top ]