
Fターム[3C007CT05]の内容
マニピュレータ、ロボット (46,145) | コラム (498) | コラムの動作形態 (465) | 垂直軸まわりに回転するもの (178)
Fターム[3C007CT05]に分類される特許
101 - 120 / 178
直線移動機構およびこれを用いた搬送ロボット
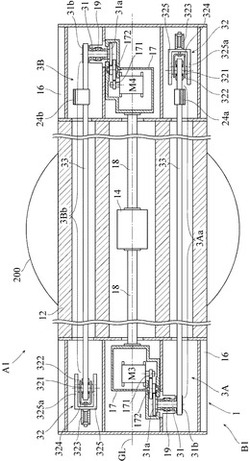
【課題】 正確な直線移動行程を実現しつつ、構造の簡略化を図ることができる直線移動機構、およびこれを用いた搬送ロボット、さらには真空環境下での使用に適した当該搬送ロボットを提供する。
【解決手段】 本発明に係る直線移動機構B1は、ガイド部材1と、このガイド部材1上に設定された水平直線状の移動行程GLに沿って移動可能な2つの移動部材と、駆動プーリ31b、およびこの駆動プーリ31bに掛け回されて移動行程GLの平行線に沿う所定の往復動区間3Aa,3Bbを往復動する出力ベルト33を含んで構成された駆動機構3A,3Bと、駆動プーリ31bを駆動するためのモータM3,M4とを備え、移動部材は、連結部材24a,24bによって駆動機構3A,3Bの出力ベルト33にそれぞれ連結されており、駆動機構3A,3BおよびモータM3,M4は、それぞれガイド部材1に支持されている。
(もっと読む)
ロボット用の或いは触覚インターフェース用の継手付き肢部並びにそのような継手付き肢部を含むロボット及び触覚インターフェース
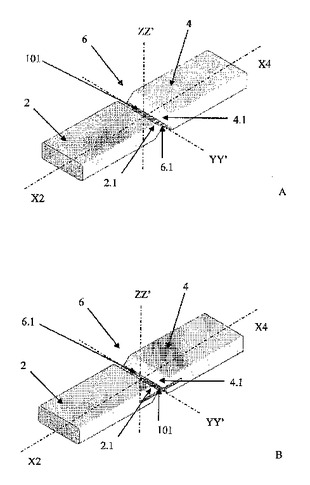
本発明の主要目的は、少なくとも第一(2)及び第二(4)の剛性セグメントと、継手(6)とを含む、ロボット又は触覚インターフェースのための継手付き及び器具付きリブであり、前記継手(6)は、繊維と、少なくとも1つの測定素子(101,102)とを含み、剛性セグメント(2,4)のそれぞれの内に固定される。本発明は、目的のために、少なくとも1つのそのような継手付き肢部を含むロボット又は感触インターフェースも有する。
 (もっと読む)
(もっと読む)
防塵機構を備えた基板搬送装置

【課題】防塵効果が高く、アーム部が複数になっても対応できる防塵機構を提供すること
【解決手段】基板を搭載するアーム部を支持するとともに、支柱9外面に設けられた直線状の開口部12を介して支柱9内に設けられた案内機構22へと接続されて、案内機構22に従って、開口部12の開口を移動する支持部材4と、開口部12を封じて、支柱9内部と外部とを隔離するシールベルト5と、を備え、案内機構22によって支持部材が移動しても、シールベルト5によって支柱の内部が外部に露出しないよう構成された基板搬送装置において、シールベルト5が、その両端を支柱内部に固定されるとともに、支持部材4に回転可能に支持されたローラに巻装されて、開口部12を封じるようにした。
(もっと読む)
ロボット等の旋回部構造
【課題】ロボット等の旋回部構造を構造が簡単でかつ安価とする。
【解決手段】駆動モータ50の駆動回転力を出力軸51に固定された外歯車52から特定の1つのクランクピン37aに固定された外歯車53に直接伝達して偏心差動型減速機17のクランクピン37aを回転させるようにしたので、モータの回転駆動力を両端部に外歯車を有する円筒体を介してクランクピンを回転させる場合に比較し、モータの外歯車に噛み合っている円筒体の外歯車を省略することができ、これにより、構造が簡単で安価となる。
(もっと読む)
多関節ロボットおよびそのロボットの移送方法と設置方法
【課題】本発明は、ロボットを分解するとなく移送でき、容易に設置できる多関節ロボットを提供する。
【解決手段】搬送物を載置するハンド部8と、前記ハンド部8と連結され、少なくとも2つ以上の回転関節3、4、5を備え、前記ハンド部8を1方向に移動するように伸縮し、軸方向に対向するように配置された多関節アーム2と、前記多関節アーム2と上下に移動するコラム12に取り付けられた移動機構11とを連結する支持部材10と、前記移動機構11に備えられた旋回機能を有する台座13とからなる多関節ロボット1において、前記コラム12は、複数のコラムブロック16が連結されて形成されたものである。
(もっと読む)
走行装置およびロボット
【課題】 長い走行距離でも防塵機能を維持し、装置本体の高さを変えることのないコンパクトで安価な走行装置を提供する。
【解決手段】 移動側の発塵部近傍に送風装置を設け、固定側にも装置の位置によって排気量を調節出来るようにしたフィルタ付きの排気装置を備える。
(もっと読む)
産業用ロボットを備えたX線システム
【課題】患者への特に良好な接近性を提供しかつ同時にその応用可能性の点で柔軟であるX線システムを提供する。
【解決手段】X線源(10)と、X線検出器(9)と、少なくとも3つの回転軸線(A1〜A6)を有する少なくとも1つの産業用ロボット(20)とを備え、X線源(10)および/またはX線検出器(9)が直接に、または支持体によって、産業用ロボット(20)に配置され、産業用ロボット(20)が移動可能に構成されている。
(もっと読む)
マイクロマニピュレータ
【課題】把持指開閉の微調整可能で操作性の高いマイクロマニュピュレータを提供する。
【解決手段】細胞ハンドリングシステムは、把持アクチュエータ71の駆動力により2本の把持指の先端部を近接させて細胞を把持するハンドリング部と、ハンドリング部をX、Y及びZ方向に移動させるX、Y、Z方向アクチュエータと、ポテンショメータ9aを有し、アクチュエータ71の駆動信号を入力するための第1コントローラと、X、Y、Zアクチュエータの駆動信号を入力するための第2コントローラと、ポテンショメータ9aから出力される電圧とホール素子715aから出力される電圧との差がゼロとなるようにアクチュエータ71の駆動を制御する把持アクチュエータ制御部70と、第2コントローラからの入力に応じたパルス数により、X、Y、Zアクチュエータの駆動を制御するX、Y、Zアクチュエータ制御部と、を備える。
(もっと読む)
多関節ロボット及びその制御プログラム
【課題】関節に作用する負荷が過負荷の場合に過負荷状態を緩和しながら作業をできるだけ継続し得るように関節を制御する多関節ロボットを提供する。
【解決手段】負荷推定部32によって各関節に作用する負荷を推定し、過負荷特定部34によって推定負荷が閾値より大きい過負荷関節を特定する。記憶装置40にはロボットの先端リンクの目標値ベクトルとそのベクトルの要素に対して予め設定された優先順位が記憶されている。目標値要素抽出部42は優先順位の高い順に非過負荷関節と同数の要素を目標値ベクトルから抽出する。力制御演算部36によって負荷と同じ方向に関節を駆動する目標駆動量が過負荷関節に対して決定される。逆変換部によって、抽出された目標値要素を実現する目標駆動量が非過負荷関節に対して決定される。過負荷関節については負荷を緩和する方向に制御しながら、非過負荷関節については目標ベクトルにできるだけ追従するように制御できる。
(もっと読む)
直角プーリ駆動機構付きの手術マニピュレータ
本発明は、マニピュレータアーム(408)と、ロボットアームにより保持されたエンドエフェクタ(428)と、エンドエフェクタ(428)により保持された手術ツール(430,560,630,700)と、マニピュレータ関節とを含む手術マニピュレータ(400)を提供し、特に、コンパクトかつ軽量な手術マニピュレータを実現するため、一つの軸線から垂直な軸線へ回転運動を伝達する直角駆動装置(10)を提供する。 (もっと読む)
医療用マニピュレータ
【課題】機構を単純化して信頼性を向上させ、かつ、操作性に優れた医療用マニピュレータを提供する。
【解決手段】操作指令部、連結部30、作業部、制御部を備えた医療用マニピュレータであって、連結部はトラカールの孔に挿入可能であり、支持部は、連結部の中心軸方向に対して直交する回転軸を有する第1の回転軸と、第1の回転軸に対して直交する回転軸を有する第2の回転軸とを有し、処置部の中心軸方向は、第2の回転軸の軸方向と概ね平行であり、支持部は、第1の回転軸の回りに回転可能な一対の第1ギアと一対の第1ギアに連動して第2の回転軸の回りに回転可能な一対の第2ギアと、一対の第2ギアと共に第2の回転軸の回りに回転可能な一対の連結部材53,54を有し、処置部は、処置部回転軸57と処置部回転軸の回りに回転自在な一対のグリッパ14a,14bを有する。
(もっと読む)
双腕作業機械
【課題】左右の作業フロントの干渉による作業フロントの破損を防止することができる双腕作業機械を提供する。
【解決手段】運転室4を備えた上部旋回体3の前部に設けた左右のスイングポスト7a,bに、それぞれ上下に揺動自在に左右の作業フロントA,Bを設けた双腕作業機械において、作業フロントA,Bの角度差及び操作装置からの指令信号に基づき、スイングポスト7a,bを旋回動作させる出力信号を生成する干渉防止制御部を備え、この干渉防止制御部は、作業フロントA,Bが接触し得る角度差の範囲を干渉危険領域、この干渉危険領域に連続する設定の角度差の範囲を準干渉危険領域と定義した場合、作業フロントA,Bの角度差が準干渉危険領域にあって作業フロントA,Bが相対的に近付くとき、スイングポスト7a,bを旋回動作させる出力信号を減少させ他方の作業フロントに向かって旋回する作業フロントの旋回動作を減速させる。
(もっと読む)
位置決め装置
【課題】簡単な構造でベローズにねじり力が作用せず、密閉容器内の被操作体を容器外から良好に回転、直進運動させることを可能にする。
【解決手段】複数の操作棒6を、密閉容器7を密閉するために該密閉容器7とZ軸ステージ4の上面プレート5の間に、ベローズ9内を貫通させて配設することにより気密性を図る。前記ベローズ9におけるZ軸ステージ4の上面プレート5の接続面と、該ベローズ9における密閉容器7との接続面とにおいて、中心位置を偏心させて取り付ける。
(もっと読む)
多関節ロボット
【課題】動作経路上に障害物があってもワークを把持するように経路変更でき、狭所空間で作業ができる多関節ロボットを提供する。
【解決手段】アーム1の長手方向に対して垂直な回動軸14のまわりに回転する手首部2と、前記部手首部2に取り付けられ、前記回動軸14に対して垂直な回動軸15のまわりに回転する回転部3と、前記回転部3に取り付けられた第2手首リンク10と、前記第2手首リンク10の他端が取り付けられた第4手首リンク12と、前記第4手首リンク12の他端が取り付けられた第3手首リンク11と、前記第3手首リンク11の他端が取り付けられた第1手首リンク9と、前記第1リンク9の他端が前記手首部2に取り付けられて平行四辺形を形成するリンク機構と、前記第3手首リンク11に取り付けられたワーク把持装置13とからなり、前記ワーク把持装置13を前記回動軸15を中心に旋回させる回動部が前記手首部2に備えられる。
(もっと読む)
アーム
【目的】本発明は、試料を搬送するアームに関し、2つの平行四辺形リンク機構を連動させると共に回転軸と摺動可能な支点を設けて1つの駆動源で試料の直線移動と回転を行い、簡単な構造かつ1つの駆動源で試料を自動搬送するアームを実現することを目的とする。
【構成】2組の平行四辺形リンクを構成する隣接するそれぞれの2点を,同じ軸にそれぞれ配置して2組の平行四辺形リンクを逆方向に回転させるリンク機構と、2組の平行四辺形リンクのうち、1つの平行四辺形リンクの残りの2点のうちの1点を駆動源で正回転および逆回転させるための回転軸および他の1点を摺動可能にした支点と、2組の平行四辺形リンクのうち、他の1つの平行四辺形リンクの残りの2点のうちの1点あるいは1点の近傍に設けた試料を搭載する試料搭載部とを備える。
(もっと読む)
ロボット
【課題】剛性を高めることができ、ロボットの大型化やコストの高騰を抑制する。
【解決手段】ワーク12を把持するハンド装置5と、ハンド装置に連結され、ハンド装置を水平方向に移動させる水平移動機構6と、水平移動機構に連結され、ハンド装置を上下方向に移動させる上下移動機構7と、を備え、水平移動機構及び上下移動機構により、ハンド装置を水平方向及び上下方向に移動させて所定の場所に載置されたワークを把持して他の場所に搬送するロボット2において、水平移動機構は、水平方向に沿ってそれぞれ同方向に移動可能な一対の水平アーム31,32,33,34を有し、ハンド装置を、一方の水平アームに対して回転自在に固定するとともに、他方の水平アームに対して水平アームの移動方向に直交する水平方向にスライド移動可能とするスライド機構8を介して連結した。
(もっと読む)
無慣性タイプの荷重取扱装置
【課題】 重量の大きな荷重を負荷部に支持し、この荷重に作業者が手を添えてその荷重を移動させる場合においても、負荷部の昇降動作のほか、水平面内での2軸方向の動作をサーボ制御、好ましくは速度サーボ制御される駆動力(モータ出力)によって行うことにより、負荷による水平面内での移動に伴う慣性が前記作業者に作用する影響が殆んどないか乃至は影響を極力小さく抑制した、いわば無慣性バランサー乃至は無慣性タイプの荷重取扱装置を提供すること。
【解決手段】 平行リンク機構を含んだ関節形アーム機構AM1,AM2,AM3の先端側に負荷部5を設けた荷重取扱装置において、前記負荷部5の昇降駆動源と水平面内におけるX,Y軸方向の移動駆動源にサーボ制御されるモータなどによるサーボ制御駆動源を設け、前記負荷部5を前記駆動源のサーボ制御される出力を利用して昇降方向での移動と水平面内での移動をさせることにより、前記負荷部5を手で支える操作者に負荷の水平面内での移動による慣性を感じさせないようにしたこと。
(もっと読む)
ブレーキ付モータとこれを備えたロボット装置
【課題】 ブレーキ開放時にブレーキ板が、ライニングに接触することがないブレーキ付モータと、これを用いたロボット装置を提供する。
【解決手段】 回転軸2の一方端側にブレーキ部3を設け、ブレーキ部3が、第1のライニング6を有して固定部に設けられた制動部5と、回転軸2に軸方向にのみ摺動自在に取り付けられたブレーキ板7と、ブレーキ板7を、第2のライニング9を有するアーマチュア8を介して制動部5の第1のライニング6に押圧するブレーキばね10と、ブレーキ板7を吸引して制動を解除する電磁装置11を備えたブレーキ付モータにおいて、回転軸2の端部に、ブレーキ板7を挟んで一対のばね受け12,13を設けるとともに、ブレーキ板7とそれぞれのばね受け12,13間に支持ばね14,15を配置する。
(もっと読む)
産業用ロボットの関節装置
【課題】部品点数を抑えた低価格の産業用ロボットの関節装置を提供する。
【解決手段】第一関節部材310及び第二関節部材320を減速機100を介し相対回転させるモータ330が両部材310,320の回転中心からオフセットして関節部材320に固定され、減速機100が、モータ回転を伝達する第一歯車333に第二歯車340を噛合させ、これを介して駆動される偏心揺動型減速機を有し、その偏心揺動型減速機が、内歯部材110と、これに保持された回転部材120,130と、外歯歯車141,142と、第二歯車340が回転するとき外歯歯車141,142を偏心揺動させる複数のクランク軸151とを有しており、内歯部材110が関節部材310に、回転部材120が関節部材320にそれぞれ一体的に係合し、複数のうち1本のクランク軸151に第二歯車340の回転を入力するよう、歯車340を1本のクランク軸151に係合させる。
(もっと読む)
ロボット装置
【課題】教示作業が容易であり、且つ実動作でのタクトタイムを短縮できるロボット装置を提供する。
【解決手段】ワークを保持するワーク保持部10を有して往復運動する第1アーム11、その第1アーム11を連結して第1アーム11と同じ方向に往復運動する第2アーム12とで少なくとも構成されたアーム部2、及び、第1アーム11の動作を第2アーム12に優先して制御して、アーム部2を始点座標P0から所定の座標位置Pまで移動させる制御装置を備えたロボット装置1により、上記課題を解決した。前記の制御装置は、ロボット座標系としてR軸を設け、始点座標P0から所定の座標位置Pまでの距離RをR=R1+R2(R1は第1アーム11の移動距離であり、R2は第2アーム12の移動距離である。)の順機構解を定義し、RからR1,R2への割付を逆機構解として定義することが好ましい。
(もっと読む)
101 - 120 / 178
[ Back to top ]