
Fターム[3C007CU02]の内容
マニピュレータ、ロボット (46,145) | 腕 (311) | 腕が伸縮するもの (49)
Fターム[3C007CU02]の下位に属するFターム
テレスコープ型 (30)
Fターム[3C007CU02]に分類される特許
1 - 19 / 19
ロボット
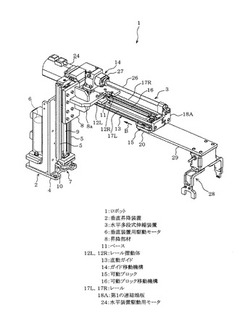
【課題】全体の大きさや重量を大きくすることなく可搬重量を増やす。
【解決手段】水平多段式伸縮装置3のベース11を、直動ガイド13の長さより短い寸法に形成し、且つこのベース11の下面に同じく直動ガイド13の長さより短い寸法の平行状態をなす一対のレール摺動体12L、12Rを設けている。又、直動ガイド13を2本のレール17L、17Rと二つの連結端板18A(ひとつのみ図示)とから構成している。さらに一対のレールレール17L、17Rを連結するについて各レールの端面で各連結端板18Aをねじ止めする構成とした。
(もっと読む)
医学用ツールを患者の体内で操作する装置

【課題】 最小侵襲外科手術に適したマニプレータを提供する。
【解決手段】 医学用ツールを患者の体内で操作する装置は、患者の体内に挿入可能な管321と、該管321により支持され且つ第一及び第二の軸線を有するジンバル継手330と、第一及び第二の軸線の周りで枢動し得るようにジンバル継手330により支持されたツール322と、管321を通ってジンバル継手330まで伸びる第一及び第二の細長いコネクタ350と、第一及び第二のコネクタ350を通じてジンバル継手330に力を加え、ツール322を第一及び第二の軸線の少なくとも一方の周りで枢動させ得るように第一及び第二のコネクタ350にそれぞれ作用可能に接続された第一及び第二のアクチュエータ355とを備えている。第一及び第二のコネクタ350は圧縮状態及び張力状態にて作用可能である。
(もっと読む)
ウェーハ搬送装置
【課題】チャンバ100の外側に無用なスペースを必要とすることなく、低価格で、チャンバ100に設けたウェーハWの搬出入口101を可及的に小さくでき、しかも正確なウェーハWの搬送が可能なウェーハ搬送装置300を提供する。
【解決手段】Xリンクユニット21で構成した伸縮手段2と、前記Xリンクユニット21を構成するリンク要素21a同士の回転軸22に係合して伸縮軸線Cに沿ってスライド可能に支持するガイド部材8と、前記伸縮手段2の先端部に取り付けられて前記載置板1を抜脱可能かつ回転不能に保持する保持手段4と、前記伸縮手段2によってウェーハW交換室から受渡位置に向かって移動する途中での載置板1の、若干の伸縮軸線Cからの位置ずれを是正しながら受渡位置に導く案内機構63とを設けた。
(もっと読む)
取り寄せ具
【課題】遠方の物品を俊敏にキャッチし取り寄せる、長尺になる取り寄せ具を提供する。
【解決手段】ハンド保持具1にレール収納体3が設けられ、該レール収納体3にはこれから前方に繰り出される伸縮レール4が設けられ、該伸縮レール4に、とってこいスライダー5が設けられ、該とってこいスライダー5に吊下連結材6を介してキャッチ7が設けられている。また後方のスライダーにはスプーン形状のキャッチが設けられている。さらに先端具42付近に、先端つまみ具片44が設けられ、キャッチした物品を手元に移動しうる構成とする。
(もっと読む)
基板搬送装置
【課題】装置の近傍に基板を搬送したときに、基板の下方にスライダベースが存在しないようにすることができる基板搬送装置を提供することを課題とする。
【解決手段】基板搬送装置1であって、本体部10に支持された第一スライダベース20と、第一スライダベース20の第一ガイドレール22に沿って移動自在な第二スライダベース30と、第二スライダベース30の第二ガイドレール32に沿って移動自在なハンド部材40と、第二スライダベース30に連動してハンド部材40を移動させる連動機構50とを備え、連動機構50は、第二スライダベース20に連動して回転する第一連動ギヤ51と、第一連動ギヤ51に対してギヤ比が小さい第二連動ギヤ53とを備え、第二スライダベース20に第一連動ギヤ51及び第二連動ギヤ53が取り付けられ、第一連動ギヤ51に連動する第二連動ギヤ53によってハンド部材40が送り出される。
(もっと読む)
マニピュレータ機構
【課題】十分な強度の付与と軽量化を両立させることが出来、然も過大な外力の作用によってアームが折れ曲がったときにも復旧が可能な伸縮式のマニピュレータ機構を提供する。
【解決手段】本発明に係るマニピュレータ機構は、アーム1と、アーム1の基端部が連結されてアーム1の巻き取り及び繰り出しを行なうアーム繰り出し装置2とを具え、アーム1は、弾性を有する複数本のテープ41を束ねてなるテープ集合体4と、テープ集合体4の長手方向に間隔をおいてテープ集合体4に装着されて、前記複数本のテープ41を互いに結束する複数の結束部材5とを具え、前記複数本のテープ41は、1本の連続する帯状弾性資材46を折り畳んで構成され、帯状弾性資材46の一方の端部がアーム繰り出し装置2に巻き取られている。
(もっと読む)
ロボットハンド
【課題】動物(典型的にはヒト)の手を模していながら、作業を器用に行うことのできるロボットハンドを提供する。
【解決手段】ロボットハンド10は、4本の指(人差し指12、中指14、薬指16、及び、小指18)と第5の指(親指20)を備える。4本の指の夫々は、直動関節18hによって、手のひら22に接続されている。4本の指の夫々は、DIP関節、PIP関節、及びMP関節に相当する3つの回転関節(第1関節18b、18d、及び18e)を有している。ロボットハンド10は、ヒトの手を模していながら、ヒトの手が有していない直動関節18hを有している。直動関節18hは、指の姿勢を保持したまま指全体を並行移動することができる。ロボットハンド10は、直動関節18hを備えることによって、回転関節のみで構成されているロボットハンドよりも作業を器用に行うことができる。
(もっと読む)
ロボット
【課題】伸縮型移動体を構成する2つの移動部材が互いに連動して移動し、且つ一方の移動部材を他方の移動部材よりも長距離移動させるための機構を、大型化を避けながら、しかも、発塵を極力抑制できる形態にて実現する。
【解決手段】伸縮型移動体5を構成する第1の移動部材9および第2の移動部材10に夫々第1のラック19および第2のラック20を設け、昇降用モータ18の回転軸18aに設けられた小径側の第1のピニオン21を第1の移動部材9の第1のラック19に噛合させ、大径側の第2のピニオン22を第2の移動部材10の第2のラック20に噛合させたので、第1の移動部材9および第2の移動部材10を連動して、且つ第2の移動部材10が第1の移動部材9の2倍の距離移動するように構成する。
(もっと読む)
スカラロボット
【課題】アーム部の位置制御が容易でロボット先端部の配置位置と目標位置とのズレの少
ないスカラロボットを提供する。
【解決手段】スカラロボット1は、ベース部2、アーム部3、テーブル部4から構成され
、ベース部2は、床面等に設置されたベース10を有する。アーム部3は、ベース10に
対して回転可能に第1のアーム11を、第1のアーム11に回動可能に第2のアーム12
を、第2のアーム12に回動可能に先端部13Bにツールの取付可能な第3のアーム13
を備えている。テーブル部4は、先端に回動板22を備えた駆動軸21がベース10の正
面10Bから水平方向に突出されている。回動板22は、その中央部に突出した第5モー
タの駆動軸に回転可能に作業テーブル24の中央部を連結固定している。作業テーブル2
4は、ワークを保持する一対のチャック26を備えている。従って、ワークは作業テーブ
ル24の回転により回動される。
(もっと読む)
防塵機構を備えた基板搬送ロボット及びそれを備えた半導体製造装置
【課題】直動式アーム内にあるリニアスライダなどの機構からの発塵を抑制するとともに、真空中に置かれる基板搬送ロボットでも使用可能な防塵機構を提供すること
【解決手段】リニアスライダによって直動する直動式アーム3を備えて基板9を所望の位置に搬送する基板搬送ロボット1において、リニアスライダ18、23を摺動可能に保持するリニアレール7、8の近傍に、リニアスライダ18、23と微小な隙間を介して敷設され、ポリ塩化ビニール又はフッ素樹脂で製作された集塵カバ44をリニアレール7、8に沿って敷設した。リニアレール6上を摺動するリニアスライダ7直近に集塵カバ10を設置し、リニアレール6上のリニアスライダ7が摺動する際に飛散するパーティクル13を集塵カバ10のラビリンス形状部で収集し、アームカバ8の開口部からパーティクル13が流出することを防止し、ウエハ搬送フォーク3上のウエハ12にパーティクル13を付着させない処置をする。
(もっと読む)
作業補助装置および複合パンタグラフ機構
【課題】構造の簡略化を図るとともに汎用性の高い作業補助装置を提供する。
【解決手段】本発明に係る作業補助装置A1は、支持ベース1と、支持ベース1に対してZ軸方向に伸縮するZ軸駆動機構2と、Z軸駆動機構2に対して基端部が接続され、この基端部に対して先端部がX軸,Y軸方向に沿って揺動する揺動駆動機構3と、上記先端部に接続され、XYZ方向に操作可能な操作部材4と、操作部材4のXYZ方向の操作力を個別に検出する操作力検出手段5と、操作力検出手段5からの情報に基づきZ軸駆動機構2および揺動駆動機構3を操作部材4の操作方向への移動を支援するように制御する制御手段とを備える。また、揺動駆動機構3は、上記基端部に対して上記先端部がX軸に沿って揺動可能な第1のパンタグラフ機構と、上記基端部に対して上記先端部がY軸に沿って揺動可能な第2のパンタグラフ機構との複合パンタグラフ機構によって構成される。
(もっと読む)
マニピュレータ機構
【課題】十分な強度の付与と軽量化を両立させることが出来、然も過大な外力の作用によってアームが折れ曲がったときにも復旧が可能な伸縮式のマニピュレータ機構を提供する。
【解決手段】本発明に係るマニピュレータ機構は、先端部に先端機構3を具えたアーム1と、該アーム1の基端部が連結されて該アーム1の巻き取り及び繰り出しを行なうアーム繰り出し装置2とを具え、アーム1は、弾性を有する複数本のテープ41を束ねてなるテープ集合体4と、該テープ集合体4の長手方向に間隔をおいてテープ集合体4に装着された複数の拘束部材5とを具え、該拘束部材5には、前記複数本のテープ41が貫通して該複数本のテープ41の相対位置を一定に保つためのガイド溝51が開設されている。
(もっと読む)
直線移動機構およびこれを用いた搬送ロボット
【課題】 正確な直線移動行程を実現しつつ、構造の簡略化を図ることができる直線移動機構、およびこれを用いた搬送ロボット、さらには真空環境下での使用に適した当該搬送ロボットを提供する。
【解決手段】 本発明に係る直線移動機構B1は、ガイド部材1と、このガイド部材1上に設定された水平直線状の移動行程GLに沿って移動可能な2つの移動部材と、駆動プーリ31b、およびこの駆動プーリ31bに掛け回されて移動行程GLの平行線に沿う所定の往復動区間3Aa,3Bbを往復動する出力ベルト33を含んで構成された駆動機構3A,3Bと、駆動プーリ31bを駆動するためのモータM3,M4とを備え、移動部材は、連結部材24a,24bによって駆動機構3A,3Bの出力ベルト33にそれぞれ連結されており、駆動機構3A,3BおよびモータM3,M4は、それぞれガイド部材1に支持されている。
(もっと読む)
屈曲駆動機構
【課題】横断面積を小さくする構造とすることを可能とする屈曲駆動機構を提供する。
【解決手段】外皮チューブの先端に設けられ、外皮チューブ内を通る複数のワイヤの伸縮に応じて屈曲動作する作動部と、外皮チューブ内に配置され、複数のワイヤのそれぞれを伸縮駆動する互いに独立した複数のアクチュエータとを備え、複数のアクチュエータが外皮チューブ軸線方向に配置されている屈曲駆動機構。さらに、外皮チューブ内を通る複数のワイヤのそれぞれの長さが、ワイヤと外皮チューブとの摩擦によってワイヤの伸縮動作が妨げられない長さとなるように、複数のアクチュエータのそれぞれを作動部に近接して配置した。
(もっと読む)
直線移動機構およびこれを用いた搬送ロボット
【課題】 簡単な構成により、より正確な直線移動行程を実現できる直線移動機構およびこれを用いた搬送ロボット、さらにはハンドを2つ備えることによってワークの搬送効率を高めた搬送ロボットを提供する。
【解決手段】 ガイド部材1と、このガイド部材1上に設定された水平直線状の移動行程に沿って移動可能な移動部2A,2B材と、これら移動部材2A,2Bを駆動する駆動機構3A,3Bと、を備えた直線移動機構B1であって、駆動機構3Aは、移動行程GLを挟んで配置され、かつ同期駆動される一対の往復動機構を含んでおり、移動部材2Aは、移動行程を挟んで離間する一対の連結部材24aにおいて、上記一対の往復動機構に連結されている。
(もっと読む)
モジュラー型自己構築及び演算システム
【課題】
【解決手段】自己構築及び演算システムのモジュールは、複数のモジュール10、A、B、Cにて形成されたマトリクス150、150´を有する。モジュール10、A、B、C、D、1000、2000、3000、4000の各々は、ピン267b、467b、567b、767b及び穴267a、467a、567a、767a型接続部を通して互いに取り外し可能に結合され、電源69に対するハウジング800を形成する6つまでの接続組立体40、200、300、400、500、600、700、1010、2010、3010、4010を備えている。接続組立体40の各々は、取り付けられた接続板31ないし36を有する、回動可能に取り付けられた脚部25ないし30、1050、1060、1070、1080、2050、2060、2070、2080、3050、3060、3070、3080、4050、4070、4080と、中央コネクタ68とを備えている。モジュール10、A、B、C、D、1000、2000、3000、4000の中央に配置された電源69は、中央コネクタ68の各々と連通している。マトリクス150、150´内の色々なモジュール10、A、B、C、D、1000、2000、3000、4000に対して、それらの脚部25ないし30、1050、1060、1070、1080、2050、2060、2070、2080、3050、3060、3070、3080、4050、4070、4080を動かし又は回動させてマトリクス150、150´の構造体の全体を動かし又は変更し又はモジュール10、A、B、C、D、1000、2000、3000、4000の電源69を交換するといったような仕事を実行するよう命令を与えることができる。 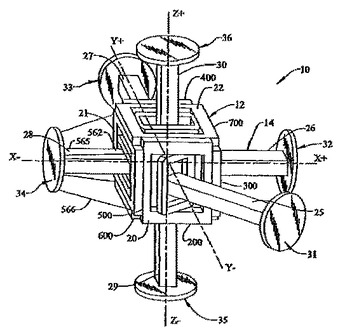 (もっと読む)
(もっと読む)
ロボット
【課題】 装置全体としての大型化・重量化を避けつつハンド部の長い上下ストロークを確保し、尚かつハンド部の移動速度の高速化を図ることもできるようにしたロボットを提供することを目的とする。
【解決手段】 ハンド部2を上下動可能に支持する第1のフレーム3と、該第1のフレーム3を上下動可能に支持する第2のフレーム4とを備え、第1のフレーム3内には、ハンド部2を上下動させる第1のボールねじ5と、第2のフレーム4に対し第1のフレーム3を上下動させる第2のボールねじ6とを上下方向にかつ並列させて配列し、さらに、第1のボールねじ5と一体となって回転する第1の歯車および第2のボールねじ6と一体となって回転する第2の歯車と直接または間接的に連結されているモータ9を収納する。
(もっと読む)
アクチュエータ
本発明は、アクチュエータに関し、特にロボットアームの制御に用いられる直動式アクチュエータおよび回転式アクチュエータに関する。本発明は、実質的にバックラッシュの無い回転運動および/または直線運動を達成する比較的に低コストの手段を提供するものである。本発明で提供するアクチュエータ(10)は、第一の駆動プーリ(28)と、第二の駆動プーリ(29)と、第一の被駆動プーリ(52、70)と、第二の被駆動プーリ(53、72)と、第一の駆動プーリ、第二の駆動プーリ、第一の被駆動プーリおよび第二の被駆動プーリと係合する無端駆動ベルト(40)と、第一の駆動プーリおよび第二の駆動プーリを駆動して無端状駆動ベルトを回転および駆動させるために連結されているモータ(19)と、被駆動プーリのうちの少なくとも一つを支持している被駆動部材(50、88、71、73)とを備えており、第一の駆動プーリおよび第二の駆動プーリが、一緒に回転するように相互に接続され、回転時には、第一の駆動プーリの周速度が第二の駆動プーリの周速度と異なるように配設され、無端ベルトが、第一の駆動プーリの周速度と第二の駆動プーリの周速度との間の差が被駆動部材に動きを生じさせるように、駆動プーリおよび被駆動プーリのまわりに巻き付けられている。 (もっと読む)
移載機
【課題】リンク機構のみで、大きなストロークを確保して大型のガラス板でも、ストッカーなどと干渉することなく、高速で移載できるようにした移載機を提供すること。
【解決手段】先端に搬器4を取り付けた2本一対の搬器支持リンク2と、先端側に搬器支持リンク2を枢着したX字形の主リンク1と、主リンク1の基端側と枢着し、基端側の駆動軸Pにて揺動可能とした2本一対の揺動リンク3とよりなり、揺動リンク3の揺動にて前記リンク機構の屈伸作用で、姿勢を制御しつつ、直線の移載方向の運行軌跡に沿って搬器4を移動するように構成する。
(もっと読む)
1 - 19 / 19
[ Back to top ]