
Fターム[3C007CX05]の内容
マニピュレータ、ロボット (46,145) | 関節 (545) | 関節部にロック機構を設けるもの (40)
Fターム[3C007CX05]に分類される特許
21 - 40 / 40
ロボットアームの姿勢保持構造
【課題】ブレーキ機構や減速機構を備えていない関節部の姿勢を保持不能な小型駆動手段を採用しつつ、関節部の姿勢保持が可能なロボットアームの姿勢保持構造を提供する。
【解決手段】一方のアーム部16,18に対して上下方向へ回転し得るよう他方のアーム部18,20が連結された関節部24,26を備えたロボットアームにおいて、関節部24,26は、通電時には両アーム部16,18/18,20の相対位置を保持可能で、非通電時には両アーム部16,18/18,20の相対位置を保持不能な小型駆動手段34により駆動すると共に、関節部22,24,26を構成する両アーム部16,18/18,20は、駆動手段34による両アーム部16,18/18,20の姿勢変化に伴って可撓変形すると共に駆動手段34への通電停止時では当該通電停止時での姿勢を維持する可撓性部材32で連結するよう構成した。
(もっと読む)
ロボットの電磁ブレーキ制御装置およびロボットの電磁ブレーキの異常判定方法

【課題】ロボットの不用意な動作を抑制しつつ、ロボットに設けられたモータを制動する電磁ブレーキの異常判定が可能なロボットの電磁ブレーキ制御装置を提供する。
【解決手段】非励磁作動形の電磁ブレーキB1〜B4の励磁コイルB1a〜B4aの通電状態を、メイン接点8aとサブ接点9a〜12aとの2段階の開閉動作で切り換える。リレー制御回路3は、ロボットの起動時、まずメインリレー8の異常を判定し、その結果、メインリレー8に異常がない場合にのみサブリレー9〜12の異常を判定する第1異常判定制御を実行する。このサブリレー9〜12の異常を判定する際には、サブ接点9a〜12aの通電状態を確認するために最低限必要な時間だけメイン接点8aを閉じる。
(もっと読む)
ロボットの関節ロック機構
【課題】ロボットが直立でのアイドリング状態において、駆動装置を作動させることなく、関節部を固定することができるロボットの関節ロック機構を提供する。
【解決手段】ロボットの関節ロック機構は、関節部を挟んで上下のフレーム材2、3と、上下のフレーム材2、3を回転可能に連結する連結機構4と、上側又は下側の一方のフレーム材に設けられたモータ等の駆動装置5と、第1のアーム7と、第2のアーム8とが回転可能に連結されており、一方のアームの端部は駆動装置に連結され、他方のアームの端部は他方側のフレーム材に回転可能に連結されたリンク機構6と、を備えている。リンク機構6は、関節部を固定する際に過開き状態となり、第1又は第2の一方のアームに立設された位置決めブロック10に他方側のアームが引っ掛かって、位置決めブロック10がロボットの関節部より上方の構成部材の自重を支持する。
(もっと読む)
リンク機構及び脚車輪型ロボット
【課題】リンクの可動範囲を十分に確保しつつ、各リンクの連結部の剛性を高めるのに好適なリンク機構、該リンク機構から成る脚部を有する脚車輪型ロボットを提供する。
【解決手段】脚車輪型ロボット100は、第1リンク17を、2つのリンク部材を間隙を空けて相対させ、その上端部において回転関節16で両持ちで支持し、下端部に略ボックス形状の第1のハウジング17cを一体形成する構成とし、屈曲時に、その間隙内に回転関節16の一部を進入可能な構成とし、第1のハウジング17cの上端部に傾斜面を設ける構成とした。更に、第2リンク19を、2つのリンク部材を間隙を空けて相対させ、その上端部を第1リンク17で両持ちで支持し、下端部に略ボックス形状の第2のハウジング19cを一体形成する構成とし、屈曲時に、第1リンク17の第1フレームの下端部を進入させる構成とし、第2のハウジング19cの上端部に傾斜面を設ける構成とした。
(もっと読む)
リンク機構及び脚車輪型ロボット
【課題】リンクの可動範囲を十分に確保しつつ、各リンクの連結部の剛性を高めるのに好適なリンク機構、該リンク機構から成る脚部を有する脚車輪型ロボットを提供する。
【解決手段】脚車輪型ロボット100は、第1リンク17を、2つのリンク部材を間隙を空けて相対させ、その上端部において回転関節16で両持ちで支持し、下端部に略ボックス形状の第1のハウジング17cを一体形成する構成とし、屈曲時に、その間隙内に回転関節16の一部を進入可能な構成とし、第1のハウジング17cの上端部に傾斜面を設ける構成とした。更に、第1リンク17を回転関節16に対して回動限界位置まで屈曲させた状態で、更に回転関節14の回転軸周りに回動させたときに、第1股関節駆動部120の側面における第1リンク17が当接する位置に、該第1リンク17の当接部位がその回動方向に進入可能な切り欠き120bを設ける構成とした。
(もっと読む)
基板搬送装置
【課題】ハンドの原点位置において多関節アームの姿勢を安定に保持する。
【解決手段】一端が基台63の支持軸91に支持され、他端が基板支持用のハンド62に接続された多関節アーム61と、ハンドの直線移動を案内するリニアガイド66と、ハンドをリニアガイドのガイドレール67aに沿って移動させるベルト76と、ベルトを駆動する駆動機構68とを備え、多関節アーム61の第1アーム71A,71Bと第2アーム72A,72Bがほぼ平行となるハンドの原点位置で、支持軸91の周りへの多関節アームの回動を規制するロック機構100を備える。ロック機構100は、ロックバー101と保持アーム102の接触によってアームの回動規制を行う。ロックバー101は、ハンドがその原点位置から所定距離移動するまでの間にわたり、ベルト76と同期して移動するとともに、保持アーム102との接触状態を維持する。
(もっと読む)
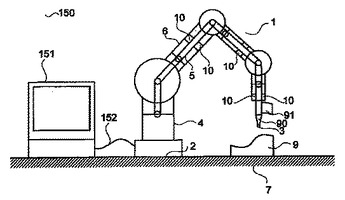
作業管理システム
【課題】 能動的な誘導を介すことなく正確な作業を実現できる作業管理システムの提供。
【解決手段】 作業位置及び作業順序の情報を備え工具の次作業位置を出力する作業管理手段と、前記相対角度と各アームの有効長に基いて、工具位置の水平位置を導くと共に、工具位置の垂直位置を導く工具位置検出手段と、当該工具位置検出手段により検出した前後の位置変化に基いて、前記工具の移動方向を導く移動方向検出手段と、前記工具位置を起点とする前記次作業位置の方向を導く目的方向検出手段と、前記工具の移動方向と前記次作業位置への方向との比較により当該工具の次作業位置への近接状況を判定する操作方向判定手段と、前記近接状況が近接傾向にある場合には各連結部のブレーキを解除し、前記近接状況が離隔傾向にある場合には各連結部のブレーキを作動させる抵抗調整手段を備える作業管理システム。
(もっと読む)
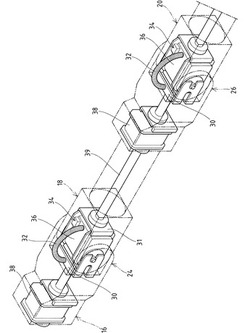
アームロック装置
【課題】コンパクトな構成でアームの回転を阻止するロック力を十分に大きくすることができるアームロック装置を提供する。
【解決手段】筒状のハウジング20の筒内には伝達筒26が回転可能に収容されており、伝達筒26には第2アーム14が連結されている。伝達筒26には電動モータ23の出力軸24が円板25を介して連結されている。円板25に形成されたフランジ29と伝達筒26に形成されたフランジ30との間においてハウジング20内には第1荷重受け筒31及び第2荷重受け筒32が収容されている。第1荷重受け筒31に形成された第1斜面331と第2荷重受け筒32に形成された第2斜面341との間にはローラベアリング35が介在されている。第1荷重受け筒31は、捻りバネ40のバネ力によってロック位置に保持され、捻りバネ40のバネ力がローラベアリング35を介してロック用のスラスト荷重に変換される。
(もっと読む)
ロボットハンド
【課題】物体を把持した状態で指リンクの位置を固定するだけではなく、物体に及ぼす把持力を能動的に高めることが可能な指リンクの位置固定機構を有するロボットハンドを提供する。
【解決手段】ロボットハンド1は、指先リンク23と、モータ200と、モータ200により回転駆動される入力プーリ202と、指先リンク23に固定された出力プーリ204と、入力プーリ202と出力プーリ204との間に張られ、入力プーリ202の回転を出力プーリ204に伝達する少なくとも1つの帯状の伝達部材(ワイヤ203)と、ワイヤ203を押し付けて固定することで、出力プーリ204の回転を停止維持するとともに、押し付けられたワイヤ203の引張り力によって、指先リンク23から把持された物体に作用する把持力を高める方向に出力プーリ204を付勢するようにしたクランプ部205とを備える。
(もっと読む)
ワイヤ駆動機構、ロボットアーム機構及びロボット
【課題】軽量で、コンパクトにできるワイヤ駆動機構、ロボットアーム機構及びロボットを提供する。
【解決手段】回転軸2を中心に回転するプーリ1と、回転軸2と直交する方向で、回転軸2と同一平面上にあるように配置される回転軸4を中心に回転するプーリ3と、プーリ1周面の所定方向に巻きつけられるとともに、プーリ3周面にプーリ1の巻きつけ方向と反対方向に巻きつけられるワイヤ5を有し、一方のプーリ1の回転によるワイヤ5の引っ張り力により他方のプーリ3に駆動力を伝達可能にする。
(もっと読む)
ロボットハンド
【課題】寸法範囲の広い把持対象物体を、安定して容易に把持することができるロボットハンドを提供すること。
【解決手段】本発明に係るロボットハンドは、回転軸を中心に回転可動な1又は2以上の指関節を有する複数の指部3と、複数の指部3を支持する掌部1とを有し、複数の指部2は、各指関節11の回転軸が平行に配置され、掌部1は、少なくとも2つの板状形状の掌板部1a、1bを備え、掌板部1a、1bはその一方の端部にて指関節11の回転軸と平行配置された回転軸を有する掌関節2を介して回転可動に連結され、その他方の端部にて指関節11を介して複数の指部3に連結されるものである。
(もっと読む)
任意形状追従型固定装置及びそれを備えた検査・補修装置、並びにそれを用いた検査・補修方法
【課題】
検査装置や補修装置等の駆動軸数を低減し、装置の小型化及び簡素化、並びに制御システムの簡略化を図ることが可能な装置を提供することを課題とする。
【解決手段】
球状の回転体と回転体を格納及び保持する格納容器とから構成される関節状構造体と、回転体の動きを拘束する回転体固定機構とを備える。さらに、回転体固定機構は、回転体の摺動部に設置された磁粉と、回転体の外部に設置され、電気を通電することにより磁粉を固着させて回転体を拘束させる励磁コイルとを備える。これにより、検査装置や補修装置等の駆動軸数を低減し、装置の小型化及び簡素化、並びに制御システムの簡略化を図ることが可能となる。
(もっと読む)
直角プーリ駆動機構付きの手術マニピュレータ
本発明は、マニピュレータアーム(408)と、ロボットアームにより保持されたエンドエフェクタ(428)と、エンドエフェクタ(428)により保持された手術ツール(430,560,630,700)と、マニピュレータ関節とを含む手術マニピュレータ(400)を提供し、特に、コンパクトかつ軽量な手術マニピュレータを実現するため、一つの軸線から垂直な軸線へ回転運動を伝達する直角駆動装置(10)を提供する。 (もっと読む)
回動調整装置及び回動装置の制御方法
【課題】回動装置を使用する際の消費エネルギを節減するとともに、回動装置やこれを駆動する駆動装置の磨耗や損傷を抑制する。
【解決手段】複数の回動軸(12a、12c、14a)を介して連結された複数の部材(体幹部材11、上腕部材13、前腕部材15)を有し、回動軸を中心とした一の部材に対する他の部材の相対的な回動運動を実現させる回動装置(動作補助装着具10)を備えるとともに、回動装置による複数の回動運動のうち少なくとも何れか一つを抑制する回動抑制手段(ロック機構30、回動抑制部62)を備える回動調整装置(装着式動作補助装置1)である。
(もっと読む)
回転ブレーキ装置
【課題】小形化が可能で、関節リンク機構の関節部などに簡単に装着することができ、回動部にブレーキをかけて確実にロックし得るブレーキ装置を提供する。
【解決手段】ブレーキ輪本体6の環状ブレーキ板部61にブレーキ力となる押圧力を印加するブレーキ中間輪9がケース1内に回動を阻止し軸方向に移動可能に嵌入される。ケース1の端部には、ロータリーアクチュエータ16によって回動されるブレーキ外輪2が回転可能に嵌入される。ブレーキ外輪2とブレーキ中間輪9の対向する面には、各々複数の円弧状傾斜面を段差部を介して円周状に配置した第1環状傾斜面22と第2環状傾斜面91が形成される。第1環状傾斜面22と第2環状傾斜面91の間には、円弧形のリテーナ内に複数のローラ4を回転自在に支持してなるローラ組付体3がローラを両側から挟むように配設される。
(もっと読む)
多関節ロボットのモータブレーキ解除装置
【課題】 電磁ブレーキ解除後のロボットアームの急激な下降動作を防止することが可能な多関節ロボットのモータブレーキ解除装置を提供する。
【解決手段】 多関節ロボット50の各関節にそれぞれ設けられたモータの各端子間に接続される制動抵抗22と、各関節のモータ毎に設けられ、そのモータの電磁ブレーキを解除する電磁ブレーキ解除スイッチSW1〜SW6とを備え、電磁ブレーキ解除スイッチSW1〜SW6によって電磁ブレーキが解除された際、その解除された電磁ブレーキに対応するモータの発電制動により、当該モータに連結されたロボットアームの自重による下降動作に制動をかけるようにしたものである。
(もっと読む)
ロボット機構
【課題】
外部から手動で動かすことができる受動状態と、動力でロボットを動かす能動状態とに切り換えられるようにする。
【解決手段】
第1クラッチ65によって、第1駆動系D1の駆動伝達経路を開放して、スライダ24のスライド移動及び第1リンク材42の回動運動が自由となる受動状態とすれば、人間の腕力等の外力よって、スライダ24、第1リンク材42及び第2リンク材46を動かすことができる。第1クラッチ65によって、第1駆動系D1の動力がスライダ24及び第1リンク材42に伝達される能動状態とすれば、第1モータ72によって、スライダ24、第1リンク材42及び第2リンク材46を動かし、作業を進めることができる。
(もっと読む)
特にロボットで使用する装置および眼鏡フレームのためのヒンジシステム
本発明は、第1の剛性要素(7)に属する一端(1)、および第2の剛性要素(8)に属する一端(3)を備えるヒンジシステムであって、前記端部が互いに一致可能な支持面を有するものに関する。本発明によれば、前記の表面間の圧接を維持するために弾性手段(18)が設けられている。本発明のシステムは、案内手段(6)よって許される範囲内で、2つの直交平面内において移動可能な少なくとも1つの実体のない旋回点、および1つの平面、または決定された向きを有するいくつかの数の平面においてのみ旋回を許可する手段(19a〜19c)も備える。  (もっと読む)
(もっと読む)
手術支援装置
【課題】本発明は、各駆動部の負荷をより正確かつ速やかに操作器にフィードバックすることができ、操作性を向上させることができる手術支援装置を得ることを目的とするものである。
【解決手段】マニピュレータ3にマニピュレータ駆動機構が設けられている。マニピュレータ駆動機構21には、ダイレクトドライブ方式のスレーブ側モータ14が設けられている。操作器1の関節部には、ダイレクトドライブ方式のマスタ側モータ6が設けられている。操作器1は、マニピュレータ3からの力覚フィードバックを受けるように制御される。
(もっと読む)
外骨格を有するCMMアーム
ベース端及びプローブ端を有する内部CMMアームと、複数の伝達手段を介して内部CMMアームを駆動する外骨格とを備える、外骨格を有するCMMアームの装置が提供される。1つ又は複数の接触プローブ、光学プローブ、及び工具が、プローブ端に取り付けられる。外骨格を有するCMMアームは、手動操作可能な実施形態及び自動実施形態で提供される。外骨格を有するCMMアームは、高精度測定のため、又は高精度動作を行うために動作可能である。外骨格を有するCMMアームの動作の方法が提供される。
 (もっと読む)
(もっと読む)
21 - 40 / 40
[ Back to top ]