
Fターム[3C007CY12]の内容
マニピュレータ、ロボット (46,145) | 本体機構の目的 (1,591) | 位置決め機構を有するもの (118) | ON−OFFスイッチ (12)
Fターム[3C007CY12]に分類される特許
1 - 12 / 12
制御装置、産業用ロボット、座標系の再現方法、及びプログラム
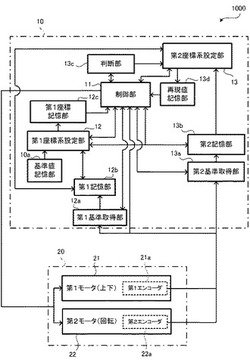
【課題】座標系を設定した後にその座標系の設定に用いた基準位置データが消失した場合にも、容易にその座標系を再現することを可能にする。
【解決手段】制御装置10が、基準位置データを記憶するための基準値記憶部10aと、制御対象の所定の運動軸を所定の位置に変位させた状態で位置の検出を行うことにより位置データを取得しそれを保存する基準取得部(第1基準取得部12a、第2基準取得部13a)と、上記位置データと基準位置データとに基づいて座標系を設定する第1座標系設定部12と、基準位置データに対する位置データの相対データを取得しそれを保存する相対値取得部(第1座標系設定部12)と、基準位置データが消失したか否かを判断する判断部13cと、基準位置データが消失したと判断された場合に、上記検出により位置データを取得し、その位置データと上記相対データとに基づいて、座標系を再現する第2座標系設定部13と、を備える。
(もっと読む)
安全なアクセスを組み合わせたパレット輸送装置

【課題】小型の装置であってパッケージ機械とパレタイザとを一体化した装置を改良すること。
【解決手段】装置は、上記パレット輸送ステーションへのアクセスを提供するドア(7)が設けられた同一の筐体(1)内に配置されており、製品(8)をパッケージする機械(2)と、ロボット式のパレット輸送ステーションと、で構成されている。この装置は、ロボットのグリップヘッド(7)の移動を制限空間内に集めるために、上記閉鎖した筐体1)内における上記ロボット(15)の運動範囲を制限する手段を備え、制限空間は、筐体(1)内であってドア(7)の近傍に位置する無形バリアから測定された最小距離に応じて規定された安全空間と重ならない。ロボット(15)の運動範囲を制限するこれら手段は、電動タイプのカムであって当該カムが上記ロボットの操縦制御部の制御下で上記ロボット(15)のロボットの主軸no.1回りにおける運動範囲を制御し、また、ロボットの運動速度を低減する。
(もっと読む)
走行装置
【課題】設置期間が短く、コンパクト、安価、且つ安全な、駆動用サーボモータ搭載走行装置を提供する。
【解決手段】本発明の走行装置が備える走行台は、複数の走行台ユニット20で構成され、各走行台ユニットのレール21及びサーキュラーピッチ歯を備える駆動ラック22は、基台27の一方の端部27cから突出して設置される。走行台ユニット同士の連結は、レール及び駆動ラックを他の走行台ユニットの基台の他方の端部27dに架け渡して行う。駆動ラックは、正確にピッチ合せをして敷設した後、駆動ラック位置決め機構30(31、32)を用いて固定する。また、走行台を水平に保つジャッキ23は、レールの垂直下の梁部材24に設けられる。
(もっと読む)
リンク機構及び脚車輪型ロボット
【課題】リンクの可動範囲を十分に確保しつつ、各リンクの連結部の剛性を高めるのに好適なリンク機構、該リンク機構から成る脚部を有する脚車輪型ロボットを提供する。
【解決手段】脚車輪型ロボット100は、第1リンク17を、2つのリンク部材を間隙を空けて相対させ、その上端部において回転関節16で両持ちで支持し、下端部に略ボックス形状の第1のハウジング17cを一体形成する構成とし、屈曲時に、その間隙内に回転関節16の一部を進入可能な構成とし、第1のハウジング17cの上端部に傾斜面を設ける構成とした。更に、第2リンク19を、2つのリンク部材を間隙を空けて相対させ、その上端部を第1リンク17で両持ちで支持し、下端部に略ボックス形状の第2のハウジング19cを一体形成する構成とし、屈曲時に、第1リンク17の第1フレームの下端部を進入させる構成とし、第2のハウジング19cの上端部に傾斜面を設ける構成とした。
(もっと読む)
リンク機構及び脚車輪型ロボット
【課題】リンクの可動範囲を十分に確保しつつ、各リンクの連結部の剛性を高めるのに好適なリンク機構、該リンク機構から成る脚部を有する脚車輪型ロボットを提供する。
【解決手段】脚車輪型ロボット100は、第1リンク17を、2つのリンク部材を間隙を空けて相対させ、その上端部において回転関節16で両持ちで支持し、下端部に略ボックス形状の第1のハウジング17cを一体形成する構成とし、屈曲時に、その間隙内に回転関節16の一部を進入可能な構成とし、第1のハウジング17cの上端部に傾斜面を設ける構成とした。更に、第1リンク17を回転関節16に対して回動限界位置まで屈曲させた状態で、更に回転関節14の回転軸周りに回動させたときに、第1股関節駆動部120の側面における第1リンク17が当接する位置に、該第1リンク17の当接部位がその回動方向に進入可能な切り欠き120bを設ける構成とした。
(もっと読む)
基板搬送装置
【課題】停電等の不慮の電力トラブルが生じた場合でも、ハンド位置を検出することができる基板搬送装置を提供する。
【解決手段】ベルト駆動で伸縮する多関節アームを備えた基板搬送装置であって、ハンド62の位置を検出する検出手段(ハンド位置検出装置)120を備え、当該検出手段は、基台63に対して相対移動可能なロッド部材121と、ベルト部材の移動をロッド部材のその軸方向への移動に変換する変換機構122と、ロッド部材に装着された磁性ブロック123と、磁性ブロックの位置を検出する検出ユニット124を有する。本発明によれば、検出ユニットを用いた磁性ブロックの位置検出によってハンドの位置を検出することが可能となる。また、真空中におけるハンドの原点位置への復帰作業も容易となり、装置稼働時間の低下を抑制することができる。
(もっと読む)
任意形状追従型固定装置及びそれを備えた検査・補修装置、並びにそれを用いた検査・補修方法
【課題】
検査装置や補修装置等の駆動軸数を低減し、装置の小型化及び簡素化、並びに制御システムの簡略化を図ることが可能な装置を提供することを課題とする。
【解決手段】
球状の回転体と回転体を格納及び保持する格納容器とから構成される関節状構造体と、回転体の動きを拘束する回転体固定機構とを備える。さらに、回転体固定機構は、回転体の摺動部に設置された磁粉と、回転体の外部に設置され、電気を通電することにより磁粉を固着させて回転体を拘束させる励磁コイルとを備える。これにより、検査装置や補修装置等の駆動軸数を低減し、装置の小型化及び簡素化、並びに制御システムの簡略化を図ることが可能となる。
(もっと読む)
往復動機構を備えた真空装置
【課題】簡単な構成で、真空容器内の対象物を保持する駆動軸の熱伸びの影響を低減して真空容器内の対象物を高精度で位置決めすることのできる往復動機構を備えた真空装置を提供すること。
【解決手段】遮へい体3の内部に、駆動軸6に面して空間部が形成され、該空間部に駆動軸の移動を案内する案内装置7が配設され、該案内装置に駆動軸の移動を停止させる機械的なストッパー69を設けた。
(もっと読む)
ワーク移し替え方法、ワーク移し替えシステム及びワーク移し替え装置
【課題】視覚センサーなどを使用することなくガラスを機械的手段によって精度良く位置決めしてパレットから別のパレットへ移し替えることのできる低設備で且つメンテナンスも容易に行えるガラス移し替え装置を提供する。
【解決手段】車体の組み立て生産順番に従って、第1のパレットから所定のガラス3を取り出した後、組み立て生産順番となるように第2のパレットに移し替えて順次配列させる作業を繰り返し行うガラス移し替え装置。この装置では、ガラス3を吸着保持する吸着保持機構部27とガラスの奥行き方向のガラス保持位置をハンドリングロボット2の基準位置に合致させる位置調整機構部28とを備えた吸着保持位置調整手段21と、手首部分とハンドフレームとの間に設けられ、吸着保持位置調整手段で保持したガラスの幅方向及び縦方向のガラス保持位置を、ハンドリングロボット2の基準位置に合致させるガラス保持位置調整手段23とを備える。
(もっと読む)
ワーク移送装置
【課題】 従来のワーク移送装置は、ワークを把持するためのチャック爪をワークの寸法に応じて用意する必要があり、そのための段取り替え時間も掛かる。
【解決手段】 本発明によるワーク移送装置は、第1の方向に沿って往復動自在に下板11に取り付けられた昇降テーブル14と、この昇降テーブル14を下板11に対し第1の方向に沿って駆動するテーブル駆動手段と、第1の方向と交差する第2の方向に沿って往復動自在に昇降テーブル14に取り付けられたヘッドプレート28と、このヘッドプレート28を昇降テーブル14に対し第2の方向に沿って駆動する旋回駆動モータ21と、ワークを挟持し得るようにそれぞれ往復動自在にヘッドプレート28に取り付けられ、ワークの寸法に応じて対向間隔がそれぞれ異なる複数組の把持面33aを有する一対のチャック爪33と、この一対のチャック爪33をこれらの対向方向に開閉駆動する把持部材駆動手段とを具える。
(もっと読む)
関節機構安全保護装置
【課題】関節機構を有する機械において、機械の機能を維持しつつ、関節機構による人などの挟み込み危険、蹴飛ばし危険を極力防止する、関節機構に対する安全保護装置を提供することを目的とする。
【解決手段】挟み込み危険、蹴飛ばし危険を有する関節機構に対し、これを覆うカバー1を設け、関節機構の動きに合わせてそのカバーの開口部3の向き、大きさ、形を変化させて、関節機構の外部露出を必要最小限にとどめることにより安全を確保する。
(もっと読む)
回転リミット装置
【課題】 可動範囲をできるだけ広げつつ、小型軽量化も可能な回転リミット装置を提供する。
【解決手段】 回転リミット装置10は、ストッパ部材1を有する固定部2と、ストッパ部材1に接触可能な突起部材3を有し左右に任意に回転可能な自由回転部4と、突起部材3が係合される円弧状のスリット5が形成された回転部6とを備えている。回転部6のスリット5長で決まる回転角度よりも大きい角度まで回転できるように、回転部6と固定部2の間に配置される自由回転部4に突起部材3を設けるとともに、固定部2にストッパ部材1を設けるため、回転部6の外側に可動式のストッパを設けずに回転リミット装置10の可動範囲を広げることができる。
(もっと読む)
1 - 12 / 12
[ Back to top ]