
Fターム[3C007CY31]の内容
マニピュレータ、ロボット (46,145) | 本体機構の目的 (1,591) | 防振 (29)
Fターム[3C007CY31]に分類される特許
1 - 20 / 29
基板搬送装置およびそれを備えた基板処理装置、ならびに基板搬送方法
【課題】基板の高速搬送に適した基板搬送装置を提供する。
【解決手段】基板処理装置は、基板を保持するハンド23A,23Bと、ハンド23A,23Bを駆動するハンド駆動機構20,26,27と、ハンド23A,23Bの動作を補助するように気体を噴射する気体ノズルを有する動作補助ユニット10A,10Bとを含む。動作補助ユニット10A,10Bは、ハンド23A,23Bに備えられており、気体噴射により生じる反力によって、ハンド23A,23Bの動作を補助する。
(もっと読む)
パイプ成形体

【課題】ロボットアームの剛性の確保及び振動減衰特性の向上を図ることを可能とするパイプ成形体を提供する。
【解決手段】
パイプ成形体であるロワーアーム7は、CFRPにより円管状に形成された外側層71と内側層72とを備えているので、剛性が確保される。さらに、ロワーアーム7は、外側層71と内側層72との間に配置された制振層73を備えているので、振動減衰特性が向上される。よって、ロワーアーム7を用いたロボットアーム3においては、剛性が確保されると共に振動減衰特性が向上される。
(もっと読む)
パイプ成形体
【課題】剛性を確保しつつ連結部材との接合を強化可能なパイプ成形体を提供する。
【解決手段】
パイプ成形体であるロワーアーム7は、炭素繊維強化プラスチックにより円管状に形成された外側層71を備えているので、金属製のものに比べて高い剛性が確保される。さらに、ロワーアーム7においては、外側層71の一端71aを含む一端部に、雄ねじ74aが設けられている。このため、ロワーアーム7と連結部材9との接合に際して、接着剤での接着に加え、雄ねじ74aと雌ねじ9aとの螺合を用いることが可能となる。したがって、ロワーアーム7によれば、連結部材9との接合を強化することが可能となる。
(もっと読む)
搬送装置、基板処理システム及び姿勢制御機構
【課題】保持台の姿勢を正確に制御することができ、また高速で移動させても保持台がふらつくことがない搬送装置を提供する。
【解決手段】搬送装置に、第一の姿勢保持リンク56、及び第二の姿勢保持リンク57を設ける。第一の姿勢保持リンク56の一端と第二の姿勢保持リンク57の一端とは連結軸53によって回転可能に連結される。保持台21の基部プレート27にレール51,52を取り付ける。連結軸53にローラ54,55を所定の軸線の回りを回転可能に取り付ける。ローラ54,55はレール51,52のローラ転走部51a,52aに接触するように配置される。保持台21を移動させるとき、ローラ54,55がローラ転走部51a,52aを転がり運動する。
(もっと読む)
基板搬送ロボット
【課題】搬送ロボットを用いて、カセットに収容された液晶基板等の板状の基板を搬出する際に、基板検出センサを用いて基板の位置を検出していた。従来は、基板がカセットの手前側(入り口側)に寄せられてカセット内部に収容されていたが、基板がカセットの奥側に寄せられる場合があり、従来の搬送ロボットでは対応できない。
【解決手段】本発明の搬送ロボットは、振動吸収体6の先端部に取り付けられた基板の有無を検出する基板検出センサ5と、ハンドの位置を移動させる移動機構11(アーム機構2等)と、ハンドの位置及び移動速度を制御する動作制御部12と、基板のエッジ位置を演算する基板エッジ位置解析部13とを備えた。上記構成にすると、基板がカセットの奥側に寄せられて収容された場合であっても、基板の位置を検出できる。
(もっと読む)
搬送装置および搬送方法
【課題】搬送工程の自動化を容易とし、効率よくワークを搬送することのできる搬送装置および搬送方法を提供する。
【解決手段】ワーク8を把持して搬送する搬送装置1である。搬送装置1は、ワーク8に設けられた2箇所の係合部に係合可能な2つの被係合部31、33を備えた把持部2と、把持部2を移動させる移動手段とを有する。把持部2を、移動方向へ移動させる際には、把持部2の被係合部31、33を結ぶ基準直線が移動方向の水平方向成分の方向と平行とし移動させるよう構成されている。
(もっと読む)
パラレルリンクロボット
【課題】一般に、ロボットの駆動源であるモータの取り付け方法として、モータフランジ面をプレートに固定し、このプレートを、ロボット本体に結合する構造を採用することが多い。パラレルリンクロボットにおいても、この構成が一般的である。しかしながら、従来の技術では、高速動作時の振動等の影響で、モータの主軸がぶれ、取り付け面とモータの相対位置がずれることにより、ロボットの位置決め精度が低下するという課題がある。
【解決手段】本発明のパラレルリンクロボットのモータ取付け方法は、対向するモータを取り付ける部材を有し、これを一体のブロック構造とするものである。これにより、従来の課題を解決し、少なくとも対向する2つのモータ主軸の中心軸を一致させ、高速動作時におけるロボットの位置決め精度低下を軽減する方法および装置である。
(もっと読む)
力制御ロボット
【課題】力制御ロボットのエンドエフェクタの振動を抑制し、エンドエフェクタに作用する力の検出精度を向上させる。
【解決手段】一方が固定端、他方が可動端となるロボットアーム1の可動端に弾性部材3aを介して接続されたエンドエフェクタ2は、エンドエフェクタコントローラ6によって開閉動作等を制御される。力覚センサ3は、エンドエフェクタ2に作用する外力を、弾性部材3aの変形量より検出する。エンドエフェクタコントローラ6は、弾性部材3aよりロボットアーム1の固定端側に支持され、ロボットコントローラ5は、力覚センサ3の検出値に基づいてロボットアーム1の動作を修正する。
(もっと読む)
ロボットの制振装置
【課題】プーリによってアーム部材を駆動するロボットにおいて、設置位置の制限を受けることなく振動の減衰性能が高いロボットの制振装置を提供する。
【解決手段】第二制振用プーリ52は、錘部材と円弧ばねの作用によって姿勢制御ベルト43の伸縮にともなう従動部材25の振動を打ち消す方向へ揺動する。姿勢制御ベルト43の伸縮にともなう従動部材25の振動を打ち消す方向の揺動は、制振用ベルト53を経由して第一制振用プーリ51に伝達される。これにより、従動部材25に振動が生じようとしても、この振動は第二制振用プーリ52から伝達された揺動によって打ち消される。また、錘部材を含む第二制振用プーリ52は、制振用ベルト53を経由して第一制振用プーリ51に接続することにより、アーム部材21の先端部32よりもモータ22側に配置される。そのため、錘部材を含む第二制振用プーリ52は、自由な配置が可能となる。
(もっと読む)
回転ダンパーおよびそれを具えるロボット関節駆動装置
【課題】小出力化した柔構造のロボットの関節に用いても、ロボットの通常作動を妨げずに作動停止時の駆動トルクの変動による振動を速やかに減衰させ、作業のタスクタイムを短縮することができる回転ダンパーを提供することにある。
【解決手段】基部材と、前記基部材に対し所定軸線周りに回転可能に配置された回転部材と、前記基部材と前記回転部材との少なくとも一方に固設されるとともに他方へ向けて押圧されて前記他方に摺接し、前記基部材に対する前記回転部材の相対回転に摩擦制動力を与える摩擦部材と、前記摩擦部材に前記他方へ向けて押圧力を加える押圧手段と、前記回転部材の回転速度が上がると前記摩擦部材に加わる押圧力を減少させる押圧力変更手段と、を具えてなる回転ダンパーである。
(もっと読む)
ロボット、及び、ロボット用のアタッチメント
【課題】被搬送物の振動を抑制するとともに、軽量かつ保守が容易で高い防塵性及び高い防滴性を有するロボット及びロボット用のアタッチメントを提供する。
【解決手段】第2のアーム15の回動中心軸と平行に設けられた主軸16と、主軸16の上端部に連結した上側連結部材21と、主軸16の下端部に連結した下側連結部材22と、上側連結部材21と下側連結部材22とを連結した2本の補助軸23と、第2のアーム15に固着され、2本の補助軸23と係合する嵌合溝を有する補助軸係合部材とを備え、2本の補助軸23は、第2のアーム15の外郭面から外側に離れた位置に配置され、主軸16の軸方向から見て、2本の補助軸23は、主軸16と第2のアーム15の回動中心軸とを結ぶ線に対して、対称に配置されている。
(もっと読む)
ロボット、2足歩行ロボット及びこれらの制御方法
【課題】ガタの存在により姿勢が不安定になることを解消可能なロボットを提供する。
【解決手段】2足歩行ロボット1は、大腿リンク6と下腿リンク8とは膝関節部7を介して連結され、大腿リンク6に対して下腿リンク8を揺動駆動する直動アクチュエータ11と、下腿リンク8の動作に減衰力を付与するMRダンパー12を備える。直動アクチュエータ11による下腿リンク8の揺動動作中に、下腿リンク8に作用する力の方向が変わるとき、MRダンパー12に減衰力を発生させる。
(もっと読む)
樹脂複合材及びこれを用いた梁構造部材
【課題】炭素繊維強化プラスチック(CFRP)を主材とする樹脂複合材に関し、制振性、強度に優れ、毒性や環境への負荷が小さい樹脂複合材を提供する。
【解決手段】炭素繊維強化プラスチック内部に、樹脂フィルムを封じてなる構成を備えた樹脂複合材であって、前記樹脂フィルムが、引っ張り弾性E’が1×107Pa〜5×108Paで、且つ損失正接tanδが5×10−2〜1×100であることを特徴とする樹脂複合材を提案する。
(もっと読む)
ロボット用ハーモニック減速機
【課題】簡単な構成で、振動振幅の低減を図るようにする。
【解決手段】ハーモニック減速機9は、主要構成品としてフレーム3bと、サーキュラスプライン10と、フレクスプライン11と、ウェーブジェネレータ12とを有して構成されている。前記フレーム3bのサーキュラスプライン取付座面3dにおける前記雌ねじ13の開口周縁部に、この雌ねじ13の径寸法より大きさな径寸法の凹部14を設けている。
(もっと読む)
ロボット
【課題】駆動部や腕部が振動するときにも角速度検出部が振動し難いロボットを提供する。
【解決手段】第1腕部8と、第1腕部8を回転させる第1モーターと、第1腕部8が回転する角速度を検出する第1角速度センサー26と、第1腕部8から第1角速度センサー26に伝わる振動を減衰させる減衰容器23及び減衰容器蓋部23aと、を有する。そして、減衰容器23及び減衰容器蓋部23aは減衰部材を有し、減衰部材が第1腕部8と第1角速度センサー26との間に配置される。
(もっと読む)
片持ビームを備えた成形品取出機
【課題】 片持ビームの重心変位による該片持ビームの上下方向の撓みの反復や揺動が発生するのを抑えて、成形品取り出し精度、つまり移動体の仕事精度の低下を回避するとともに、片持ビームの基部を片持支持部材に結合する締結手段の早期劣化を回避できる片持ビームを備えた成形品取出機を提供する。
【解決手段】 トラバース型の成形品取出機1における横行フレーム(片持ビーム)3には、該横行フレーム(片持ビーム)3に支持された移動体18の進退に伴う横行フレーム(片持ビーム)3の重心変位を抑制する重心変位抑制ウェイトからなる重心変位抑制手段15を設ける。
(もっと読む)
ロボットハンドおよび指機構
【課題】物体を変形あるいは毀損することなく把持するのに適したロボットハンドを提案すること。
【解決手段】ロボットハンド1は、リニアアクチュエータ5の作動ロッド5aの前後方向への伸縮動作を、リンク機構を介して左右の第1リンク11の開閉動作に変換している。リンク機構にはコイルバネからなる左右の中間リンク13が含まれている。左右の第1リンク11が把持対象の物体Wに当たると中間リンク13が弾性変形して伸び、物体Wを把持する力が中間リンク13の弾性変形によって徐々に増加する。物体Wに急激に大きな把持力が作用して、物体Wが変形する、毀損するなどの弊害を防止できる。
(もっと読む)
アクチュエータ装置およびこれを用いるロボット装置
【課題】動力停止時には外力により関節等を容易に動かすことができ、定常的に大きな負荷が作用した場合にも効率を損なわず、アクチュエータ自体を湾曲設置可能として柔軟に配置できるようにしたアクチュエータ装置およびロボット装置を提供する。
【解決手段】モータの回転を線方向の動作に変換するアクチュエータ装置において、モータに直接または間接的に接続されて回転する回転基部(12または15)と、前記回転基部の回転軸上でスライド可能に設けられた摺動基部(15または16)と、前記回転基部とともに回転し遠心力で外側へ移動可能な1以上の錘部材(14)と、前記遠心力を利用して前記回転基部と摺動基部間の距離を変更するリンク機構(13)とを有するユニットを1以上設けて構成する。
(もっと読む)
把持具
【課題】 移動状態から停止した時の慣性による振動を抑制することで、振動消失までの時間を短縮して生産設備の生産能率の向上に寄与することができる把持具を提供する。
【解決手段】 生産設備2で生産されたワークまたはインモールドワークをワーク把持位置からワーク解放位置に搬送する搬送手段3に設けられる把持具1であり、この把持具1は、搬送手段3側の基部10と、この基部10に延設され、かつ複数の把持ヘッド4を備えた把持部11とからなり、把持部11は、複数の枝12〜19を分岐延出した枝群20によって構成し、基部10から最も離れている各枝12〜19それぞれの先端部側の重量を小さく(軽く)する。
(もっと読む)
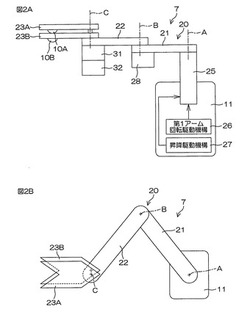
ロボット、及び、ロボット用のアタッチメント
【課題】被搬送物の振動を抑制するとともに、軽量かつ保守が容易で高い防塵性及び高い防滴性を有するロボット及びロボット用のアタッチメントを提供する。
【解決手段】スカラ型ロボット10は、基台11に回動可能な回転軸12に固着された水平方向に延びる第1のアーム13を備え、そのアーム13の先端部である支持部14には第2のアーム15が回動可能に連結され、該アーム15の先端部には上下方向に昇降するとともに、水平方向に回転可能な主軸16が主軸筒に支持されている。主軸16には、上端部に上部連結部材21が、下端部に下部連結部材22が各々回動可能に備えられている。両連結部材21,22は、主軸16に平行な2本の補助軸23にて接続されて、該アーム15の先端下面に設けられた回転防止部材24の嵌合溝24aに嵌合されている。この構造により、主軸16の先端部の振動は好適に抑制される。
(もっと読む)
1 - 20 / 29
[ Back to top ]