
Fターム[3C007DS03]の内容
マニピュレータ、ロボット (46,145) | 把持装置の全体構成 (1,374) | 単一の挟持装置又は吸着装置 (1,104) | 複数の把持部を有するもの (214) | 挟持部と吸着部を有するもの (32)
Fターム[3C007DS03]に分類される特許
1 - 20 / 32
樹脂成形品の把持装置
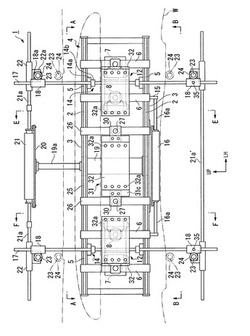
【課題】樹脂成形品の把持装置において、樹脂製形品の把持不良を抑止し、かつ吸着部品による擦り傷等の発生を抑止すると共に、三次元的に複雑な表面形状の多種類の樹脂成形品にも対応可能とし、かつ当該装置の小型化及びコストダウンを図る。
【解決手段】当該装置の長さ方向に移動可能な垂直ロッド17の一端側の支持部材18は、係止部材35により垂直ロッド17に固定可能であり、他端側の支持部材18はシリンダ19により昇降自在であり、中央バキュームハウジング32及び外側バキュームハウジング12の表面には可撓性の当接部材32がそれぞれ配設され、かつ内部にはマニホールドがそれぞれ形成され、各バキュームハウジング12,31の当接部材32には、各マニホールドに連通すると共に樹脂成形品Wの表面に向けて開口する複数の開口32aがそれぞれ開設される。
(もっと読む)
配線基板の非接触搬送装置、配線基板の製造方法

【課題】集塵穴から異物を効率良く回収することにより、異物の周囲への拡散をより確実に抑えることができる配線基板の非接触搬送装置を提供すること。
【解決手段】本発明の非接触搬送装置は吸引部を備える。吸引部の吸引面301の外周部には、吸引面301を包囲するように突設された環状の凸部302が形成される。また、配線基板の基板主面上の異物を回収する集塵穴306が、吸引面301における凹部の外側領域かつ凸部302の内側領域に配設される。
(もっと読む)
把持装置と方法
【課題】一度に、複数の対象物を把持して搬送できるようにすることにある。
【解決手段】対象物1を挟んで把持する1対の把持爪3a、3bと、1対の把持爪を動作可能に支持して空間内を移動する支持移動体7と、を備える。1対の把持爪3a、3bは、支持移動体7に対して往復動方向に駆動されることで、互いに近接して対象物1を挟み、または、互いに離間して該対象物を解放するようになっている。さらに、1対の把持爪3a、3bの間に位置し、1対の把持爪が把持した対象物1を保持する保持機構8を備える。1対の把持爪3a、3bに把持された対象物1が、当該把持から解放されるように保持機構8内の奥側に移動させられて、当該奥側で保持機構8に保持され、この状態で、1対の把持爪3a、3bが、別の対象物1を把持できるように構成されている。
(もっと読む)
ロボットシステム及び物品加工方法並びに工業製品の製造方法
【課題】より少ないコストでロボットを用いた加工作業を行なうことができるようにした、ロボットシステム及び工業製品の製造方法を提供する。
【解決手段】付着材が付着した対象物を保持する保持機構18を装着したマニピュレータ101と、マニピュレータ101の動作を制御するコントローラ101Aと、マニピュレータの近傍に配設され対象物の付着材を保持する付着材剥離ユニット104と、を有し、コントローラ101Aは、保持機構18により保持された対象物の付着材を付着材剥離ユニット104に所定の進入角度で進入させて対象物と付着材とを剥離させる。
(もっと読む)
ウェーハ搬送装置及びウェーハ搬送方法
【課題】本発明の目的は、ウェーハ収納用カセット内に載置されているウェーハの載置位置がずれている場合であっても、容易に、ウェーハの位置を修正し、ウェーハを保持・搬送できるウェーハ搬送装置及び方法を提供することにある。
【解決手段】ロボットハンド10が、ウェーハ下方の空間32内を水平移動可能でかつ、水平移動時に保持すべきウェーハ20の周縁部の高さ位置HWよりも大きな高さ寸法HYをもつウェーハ位置調整手段13とを有することを特徴とする。
(もっと読む)
搬送ハンド装置
【課題】板材の搬送において、当該板材との干渉を抑制し、所定位置に正確に板材を配設することのできる搬送ハンド装置を提供すること。
【解決手段】搬送ハンド50が、板材82をマグネット部54の電磁石62により吸着して母材84上にある所定の溶接位置へと搬送した後、当該所定の溶接位置より所定間隔空けた真上位置で当該板材の吸着を解除することでマグネット部及びガイド部58により板材の姿勢を保持しつつ当該所定の溶接位置に当該板材を落下させて配設する。
(もっと読む)
成形装置および搬送装置
【課題】多様な形状の成形素材の正確な位置決めおよび搬送時間の短縮を実現する。
【解決手段】光学素子材料20を吸着保持する吸着パッド13と、光学素子材料20を把持して位置決めするチャック3を共通の吸着筒1に共通に固定し、吸着筒上下シリンダ12および吸着筒上下スライドステージ6によって同時に昇降させ、吸着パッド13は吸着パッド上下機構13aによって独立に吸着高さ位置を制御可能にし、光学素子位置決め台8に載置された光学素子材料20の外周部を一対のチャック3の間に把持して位置決めした後、吸着パッド13のみを降下させて光学素子材料20の上面を吸着保持させ、吸着パッド13およびチャック3によって位置決めされて保持された状態の光学素子材料20を、脱落させることなく、高速かつ正確に成形下型11に載置する。
(もっと読む)
ガラス基板梱包装置およびその梱包方法
【課題】ガラス基板とその保護シートの高速搬送を実現し、併せて、高精度で高品質の積載梱包を達成する。
【解決手段】ガラス基板梱包装置は、保護シート3上にガラス基板4が載置される載置ステーションと、保護シート3とガラス基板4とを交互に積載する積載ステーションと、保護シート3上に載置されたガラス基板4を保護シート3と共に保持し、積載ステーションに積載する積載手段としてのガラス基板積載装置とを備える。ここで、ガラス基板積載装置を構成するロボットアームは保護シート3およびガラス基板4を保持する保持部43を有し、この保持部43は、ガラス基板4を吸着する複数の吸着パッド45と、載置された状態のガラス基板4からはみ出た保護シート3の辺縁部分のうち互いに対向する2つの辺縁部3a,3bを挟持する挟持部46とを有する。
(もっと読む)
ワーク把持装置
【課題】取出し対象のワークの周囲にある物との干渉が起こりにくいワーク把持装置を提供する。
【解決手段】把持装置1は、吸着力によりワーク5を保持可能な吸着パッド22、および、それが一端に取り付けられた棒状部21を有する一次捕捉機構20と、ワーク5を挟み込んで保持する把持爪31,32と、駆動装置50、および駆動装置50の駆動力を把持爪31,32に伝達する伝動機構40と、を有している。伝動機構40は、把持爪31,32が吸着パッド22よりベース板10側に位置する退避位置と、把持爪31,32が吸着パッド22を越えて突出する把持位置との間で、把持爪31,32を棒状部21の軸線方向に移動させ、かつ、把持爪31,32を、棒状部21の軸線方向に把持位置へと移動させるのと同時に、把持爪31,32の間の距離を狭めるように移動させる。
(もっと読む)
危険物把持装置
【課題】地中或いは地表に遺棄された対象物の中から目標の対象物のみを確実に把持でき、落下等の発生が確実に防止できる危険物把持装置を提供する。
【解決手段】対象物Wを吸着する真空吸引機構55のバキュームパッド58a〜58dに対し、第1把持爪22及び第2把持爪42の基端側把持爪部23、43をバキュームパッド58a〜58dから離れる上方の開放位置に揺動して目標とする対象物Wとの接触を確実に回避した状態で目標とする対象物Wのみを吸着する。また、把持位置に揺動した第1把持爪22の基端側把持爪部23と第2把持爪42の基端側把持爪部43によって対象物Wを把持すると共に、バキュームパッド58a〜58dと把持位置に揺動した第1把持爪22及び第2把持爪42の各先端側把持爪29、49によって上下方向から対象物Wを把持する。
(もっと読む)
基板保持機構およびそれを用いた露光装置並びにデバイス製造方法
【課題】 基板の両面を同時に保持することにより、保持面積の拡大、保持力の向上を図ると共に、基板受け渡し面のチルト補正の容易化、基板の面精度の維持を可能にし、装置全体の基板搬送スループット向上、および搬送精度の向上を実現する。
【解決手段】 基板8の両面の一方を吸着する第1保持部2,3と、他方に当接してそれを支持する第2保持部6,7と、基板を吸着した第1保持部を第2保持部側へ付勢する付勢手段4,5とで基板保持機構1を構成する。
(もっと読む)
ワーク搬送ロボット及びワーク搬出入方法
【課題】プレスブレーキへ供給し位置決めするワークを吸着保持する機能のワーク保持手段とワークをクランプする機能のワーク保持手段とを備えたワーク搬送ロボット及びワーク搬入方法を提供する。
【解決手段】ワーク搬送ロボット1にX,Y,Z方向へ移動自在に備えたロボットヘッド15に主回転軸17を回転自在に備えると共に、当該主回転軸17の軸心に対して直交する方向のワーク支持面を備えた回転フレーム23を前記主回転軸17に一体的に備え、この回転フレーム23に支持されたワークWの一辺側を把持自在又は吸着保持自在な第1ワーク保持手段27を前記回転フレーム23に備えると共に、前記ワークWの前記一辺に隣接しかつ前記一辺に交差する方向のワークの他辺側を把持自在又は吸着保持自在の第2ワーク保持手段29を前記回転フレーム23に備え、前記第1ワーク保持手段27又は第2ワーク保持手段29の一方を、前記ワークの辺に沿う方向であって他方のワーク保持手段に対して接近離反する方向へ移動可能に構成してある。
(もっと読む)
吸着ヘッドの駆動方法
【課題】自動分析装置のような高速処理が求められる装置に使用される吸着ヘッドを駆動方法において、吸着の成功率を高めることを目的とする。
【解決手段】負圧により反応容器31を吸着する容器ピックアップ装置21の駆動方法であって、反応容器31に対する吸引力を発生し得ると推定される吸引推定領域に設定された予備位置に容器ピックアップ装置21を配置した状態で、容器ピックアップ装置21に負圧を加える第1のステップと、該第1のステップにおいて容器ピックアップ装置21により反応容器31を吸着できなかった場合には、容器ピックアップ装置21に負圧を加えた状態で、前記吸引推定領域において容器ピックアップ装置21を移動させる第2のステップと、を有することを特徴とする容器ピックアップ装置21の駆動方法。
(もっと読む)
把持装置およびその制御方法
【課題】複雑な装置や大掛りな装置を必要とせずに、把持対象物を安定して把持し、容易に離すことができるマニピュレータを提供する。
【解決手段】マニピュレータに搭載される吸着離脱補助機構は、把持対象物の表面に向かって突出した外周部およびその外周部に囲まれた窪み部34を有して弾性変形可能な吸盤31と、吸盤31の背面35と指部材21の間に配置されて、指部材21と把持対象物とが互いに押し付けられたときに吸盤31の背面35を押す押付け力伝達部32と、吸盤31の外周部と指部材21の間に配置されて、指部材21と把持対象物とが互いに引き離されるときに吸盤31の外周部を指部材21側に引っ張る引張力伝達部材33とを有する。
(もっと読む)
把持装置
【課題】複雑な制御を行うことなく、収穫対象果実を把持可能なハンド機構を提供する。
【解決手段】収穫対象のイチゴの−Z側に位置決めされるガイド16と、ガイド16に設けられ、Z軸に沿ってスライド移動するスライダ18と、スライダ18に設けられ、スライダ18の+Z方向への移動に伴って、ガイド16と一体的に構成されたストッパ12aと接触することにより、X軸回りに回転する第1回転部22Aと、第1回転部22Aにその下端部が固定され、第1回転部22Aの回転によりその上端部がイチゴに近づく方向に移動する第1フィンガー部24Aと、第1フィンガー部24Aの上端部とともに、収穫対象のイチゴを把持する第2フィンガー部24Bと、を備えている。
(もっと読む)
基板検査装置
【課題】真空吸着状態が切れても基板の健全性を維持し、検査時に発見した基板の裏面の汚れ等をクリーニングすることを可能にする。
【解決手段】基板Aの少なくとも裏面の目視検査を行うための基板検査装置1であって、基板Aの裏面を真空吸着する吸着保持部6と、該吸着保持部6により吸着された状態の基板Aの外周縁に接触して半径方向に挟む複数の接触部10を有する押圧保持部8とを備える基板検査装置1を提供する。
(もっと読む)
吸着ハンド及び吸着装置並びにワークの吸着方法
【課題】サイズの異なるワークであっても安定して確実に吸着することができ、効率の良い作業を行うこと。
【解決手段】ワークの表面W1を吸着して該ワークWをピックアップするハンドであって、ワークの表面に対向する吸着面2aに吸着孔4aが形成されたメインノズル2と、該メインノズルの周囲を囲んだ状態で該メインノズルに対して相対的に移動可能とされ、ワークの表面に対向する先端面3bにメイン通気孔5が形成されたエンドノズル3と、を備え、メイン通気孔が流体を外部に吐出又は外部から吸引を行う通気孔として機能する吸着ハンド1を提供する。
(もっと読む)
把持装置、並びに把持装置を備える整列装置、収容装置および把持方法
【課題】把持対象の上方の位置に配置しても、その端部を表裏の側から挟持可能な把持装置を提供する。
【解決手段】このハンド(把持装置)30は、一対をなす第一の把持面31aおよび第二の把持面32aでシート部材(把持対象)2を挟持するものである。そして、その第二の把持面32aは、シート部材2の外縁部2tよりも外側の位置から内側の位置にかけて旋回されるようになっており、さらに、自身の旋回円S2に対し、前記内側の位置では、その径方向にシート部材2を挟持するように第一の把持面31aに対向するとともに、前記外側の位置では、径方向で第一の把持面31aに重なりあわない待避位置に位置するようになっている。
(もっと読む)
ハンドリングロボット
【課題】同一のハンド装置の爪でワークを掴むことができかつ吸着パッドでワークを吸着できる吸着ハンドユニットを掴むことができるハンドリングロボットを提供すること。
【解決手段】ハンド装置 2は、爪 3でワークを掴むことができ、かつハンド装置 2の爪 3は、吸着ハンドユニット 8の本体15を内側で掴む内側補合形状及び内側に開口する内側貫通穴14を有し、吸着ハンドユニット 8の本体15は弾性シール17に本体内の配管16で配管接続されハンド装置 2の爪 3の内側に開口する内側貫通穴14と嵌まり合うよう弾性シール17の外側に開口する外側開口26、を有し、ハンド装置 2の爪 3は、ワークを掴む作業を行った後、吸着ハンドユニット 8をハンド装置 2の爪 3の内側で掴み、吸着ハンドユニット 8の吸着パッド19でワーク24を吸着する作業を行う。
(もっと読む)
ハンドリングロボット
【課題】同一のハンド装置の爪で、ワークを掴むことができ、かつエアブロー又は洗浄液での洗浄などの流体噴出ユニットを掴むこともできるハンドリングロボットを提供。
【解決手段】ハンド装置 2は、爪 3でワーク 4を掴むことができ、かつハンド装置 2の爪 3は、流体噴出ユニット 8の本体15を内側で掴む内側補合形状25及び内側に開口する内側貫通穴14を有し、流体噴出ユニット 8の本体15は吸着パッド17と、吸着パッド17に本体内の配管16で配管接続されハンド装置 2の爪 3の内側に開口する内側貫通穴14と嵌まり合うよう吸着パッド17の外側に開口する外側開口26、を有し、ハンド装置 2の爪 3は、ワーク 4を掴む作業を行った後、流体噴出ユニット 8をハンド装置 2の爪 3の内側で掴み、流体噴出ユニット 8のノズル20から圧縮流体24を噴出する作業を行うようにした。
(もっと読む)
1 - 20 / 32
[ Back to top ]