
Fターム[3C007DS08]の内容
マニピュレータ、ロボット (46,145) | 把持装置の全体構成 (1,374) | 複数の挟持装置又は吸着装置 (152) | タレット型 (35)
Fターム[3C007DS08]に分類される特許
1 - 20 / 35
マニプレータ装置およびマニプレータ付き作業装置
【課題】
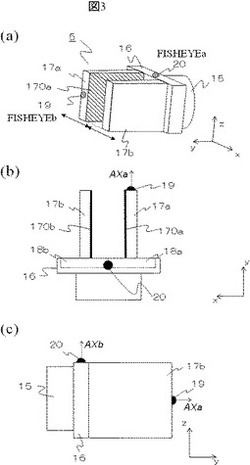
任意の位置にある把持対象物が、マニプレータによる把持可能な範囲に入るように、マニプレータを操作するための情報を取得し、また、その情報を操作者に分かりやすく提示する。
【解決手段】
アーム部とハンド部から成り、当該ハンド部は、把持範囲にある対象物を把持する1つまたは複数の指部を有するマニプレータ装置であって、前記指部の先端に第1の全方位撮像装置を設けるとともに、前記ハンド部の、前記指部の先端以外の位置に第2の全方位撮像装置を設け、前記第1の全方位撮像装置と前記第2の全方位撮像装置とは撮像軸が異なるように、例えば直交するように構成する。第1の全方位撮像装置による撮像画像に対象物が投影されず、且つ、第2の全方位撮像装置による撮像画像に対象物が投影されないことを確認することで、前記対象物が把持範囲にあることを判定することができる。
(もっと読む)
ロボット歩行装置

【課題】構造が簡便で製造費が安価で且つ堅牢な、競走競技に適した歩行ロボットを提供する。
【解決手段】ロボット走行装置は、胴体と、1対の脚部と、前記脚部の下端部に装着された足裏部材と、前記1対の脚部を交互に走行させる駆動機構を有する。脚部は、ロボットの胴体の矢状面に対して垂直に配置された枢動軸回りに枢動可能に構成され、駆動機構は、遠隔操縦によって回転可能なモータと、該モータの軸に装着された回動板と、該回動板の両側に装着された1対の揺動軸と、を有する。
(もっと読む)
ロボットハンド
【課題】配線によりロボットハンドやロボットアームの可動範囲が制限されることを抑制する。
【解決手段】組立ロボットは、ロボットアーム、ロボットハンド2および制御部を備え、ロボットハンド2は、ワークを把持する把持部、および、把持部に駆動用の圧縮エアを供給する電磁弁33を備える。組立ロボットでは、把持部制御信号が制御部からロボットハンド2の無線通信部35へと無線にて送信され、把持部によるワークの把持状態を示す把持状態信号が、無線通信部35から制御部へと無線にて送信される。このため、制御部とロボットハンド2との間において、把持部制御信号および把持状態信号の送受信用の配線が不要となる。このように、ロボットハンド2に接続される配線を削減することにより、配線によりロボットハンド2やロボットアームの可動範囲が制限されてしまうことを抑制(または防止)することができる。
(もっと読む)
ロボットハンド
【課題】配線によりロボットハンドやロボットアームの可動範囲が制限されることを抑制するとともに把持部の種類を容易に変更する。
【解決手段】組立ロボットでは、制御部から固定部31へと出力された把持部制御信号および結合部制御信号が、スリップリング35を介して回転部32へと伝達され、また、把持状態取得部から出力された把持状態信号が、回転部32からスリップリング35を介して固定部31へと伝達されて制御部へと送られる。このため、固定部31と回転部32との間における信号伝達用の配線が外部に露出することを抑制することができ、配線によりロボットハンドやロボットアームの可動範囲が制限されてしまうことを抑制することができる。また、ロボットハンドでは、把持部および把持状態取得部を備えるハンド先端部が、結合部323により回転部32に対して着脱自在に固定されるため、把持部の種類を容易に変更することができる。
(もっと読む)
チャック装置
【課題】チャック装置において爪部の可動範囲の変更を容易に行う。
【解決手段】チャック装置5は、進退部材73を進退させる進退駆動部60、および、複数の爪部820を有する把持機構8を有する。把持機構8は、複数の爪部820に接続される複数の板カム部82、および、複数の爪部820の移動をガイドするガイド部を有する。板カム部82にはカム孔821が形成され、進退部材73に設けられたピン732がカム孔821に係合し、進退部材73の移動により、複数の爪部820のそれぞれが進退部材73の移動方向に垂直な方向に移動する。チャック装置5では、複数の板カム部82が、カム孔の形状が異なる他の複数の板カム部に交換可能である。これにより、チャック装置5において爪部の可動範囲の変更を容易に行うことができる。
(もっと読む)
チャック装置
【課題】制御部においてワークの把持が誤って認識されることを簡単な構成にて防止する。
【解決手段】チャック装置5は、爪部62を、待機位置から把持位置へと向かう方向へ連続的に移動することによりワークを把持する把持部50を備え、把持部50には把持検出部51および判定回路52が取り付けられる。把持検出部51では、爪部62の待機位置からの移動において、爪部62が把持位置に到達した時にON信号が出力され、万一、把持位置を超えた場合にON信号の出力が停止される。判定回路52では、把持検出部51からのON信号の入力が所定時間継続した場合にのみ、ワークの把持を示す把持信号が外部の制御部12に向けて出力される。これにより、ワークが把持されていないにもかかわらず、爪部62が把持位置を通過する際に発生するON信号に起因して、制御部12においてワークの把持が誤って認識されることを、簡単な構成にて防止することができる。
(もっと読む)
ロボットハンド
【課題】ロボットハンドにて簡単な構造で先端部の非装着時に流体流路および伝送経路を遮断する。
【解決手段】ロボットハンドでは、ハンド本体部3と把持部を有するハンド先端部4とが着脱自在である。ハンド本体部3は、第2穴部352、第2穴部352内に設けられる摺動部38および付勢部39、把持部の駆動用の流体が流れる第2流体流路342、並びに、把持部からの信号が伝送される伝送経路37を有する。これらの流路および経路の一部は摺動部38に形成される。ハンド先端部4の非装着時には、摺動部38が付勢部39に付勢されて遮断位置に位置し、これらの流路および経路が遮断され、ハンド先端部4の装着時には、ハンド先端部4により押されて摺動部38が接続位置に位置し、これらの流路および経路が摺動部38を介して接続される。これにより、簡単な構造でハンド先端部4の非装着時に第2流体流路342および伝送経路37が遮断される。
(もっと読む)
移載装置
【課題】小型で高速動作が可能な移載装置を安価に提供する。
【解決手段】側面に第1と第2の円筒溝カム(11,12)、底面51に溝カム52が形成されたシリンダー4と、ピニオンギア23環装され、第1円筒溝カムにより上下するシャフト部21と、第2円筒溝カムによってシャフト部内で上下するロッド部22と、ピニオンギアに歯合して溝カムにより前後するラックギア54と、物体W1の把持と開放を相補的に行う二つ一組のチャック部31を備えたチャックユニット6aを備え、ピニオンギアはシャフト部を介してチャックユニットを旋回させ、ロッド部はシャフト部と同期して上下するとともに、シャフト部の下死点停留期間Δt2中にさらに下方の第2下死点Dd2に至り、二つ一組のチャック部はロッド部が第2下死点に至ったときに、それぞれの把持状態と開放状態を切り替え、上死点と第1の下死点までの区間ではその状態を維持する。
(もっと読む)
ワーク搬送装置
【課題】 少ない駆動源でワーク保持部材を3軸方向に移動させることができ、小さな駆動源で軽快な移動動作が可能なワーク搬送装置を提供する。
【解決手段】 X,Y,Z軸の直交座標系において、第1および第2の走行体3,4は、X軸方向のレール2に沿って走行可能である。第1の走行体3は、X軸方向の軸心およびZ軸方向の軸心の2つの軸心回りに揺動自在に第1の揺動アーム5を支持する。第2の走行体4は、Z軸方向の軸心回りに揺動自在に第2の揺動アーム6を支持する。第2の揺動アーム6の先端に、Z軸方向の軸心回りに回動自在に支持部材7を設ける。支持部材7にZ軸方向にスライド自在に支持され、かつ第1の揺動アーム5の先端にX軸方向の軸心およびZ軸方向の軸心の2つの軸心回りに回動自在に支持されたワーク保持部材8を設ける。
(もっと読む)
チャック装置およびロボットアーム
【課題】ワークの搬送効率をより向上することができるチャック装置を提供すること。
【解決手段】チャック装置1は、チャック部10〜50を備える。チャック部10は、3つのチャック11を支持する支持板12が連結部材13によりギア14と連結されてなる。支持板12は、側板62にY方向に沿って上下に移動自在に支持されている。駆動側のギア82の回転によりギア87が回転すると、クランク機構である連結部材13により回転運動が直線運動に変換され、支持板12が上下に往復運動し、チャック11も上下に往復移動する。チャック部20〜50も同様である。チャック装置1は、隣り合うチャック部同士の往復方向における位置にずれが生じるように構成されている。例えば、チャック部20が前進すれば隣のチャック部10が後退する動作を行う。これにより隣り合うチャック部の間隔を広げなくてもチャックの数を増加してワークの搬送効率を向上できる。
(もっと読む)
ロボット制御方法およびロボット制御システム
【課題】主として部品供給トレイなどに搭載された作業対象部品などの位置ずれに起因する「チョコ停」の未然防止を可能とするロボット制御方法およびロボット制御システムを提供する。
【解決手段】ロボット制御方法の一実施形態では、ロボットハンド31の1つ以上の作業対象部品が搭載された部品供給トレイ5が、所定位置に載置された状態で、作業対象部品のすべてが含まれるように撮像し、撮像された画像データから作業対象部品それぞれを検出するとともに、検出された作業対象部品それぞれの正常位置に対する位置誤差が許容範囲内か否かを判定する。位置誤差が許容範囲内と判定された作業対象部品に対しては通常作業を実行するが、位置誤差が許容範囲内ではないと判定された作業対象部品に対しては通常作業を実行しない。
(もっと読む)
ビンピッキングシステム
【課題】ロボットによるビンピッキング作業を良好に行うことができながらも、設備全体の大型化を抑制して小型化の要求に応える。
【解決手段】作業台2上に、直角座標型のロボット3、多数個の部品Wをばら積み状態に収容する部品供給箱4、カメラ6、仮置き領域8、部品載置位置7aを有するコンベア装置7を設ける。ロボット3の手首部16に、水平方向に延びる軸を中心に回動するプレート17を設け、このプレート17に、吸着ノズル19とチャック20とをV字状に開いた形態(角度θが90〜135度)で一体的に有する複合ハンドツール18を取付ける。制御装置21は、部品収容箱4内の部品Wをカメラ6によって認識し、吸着ノズル19により1個ずつピックアップして仮置き領域8に仮姿勢とした上で載置し、チャック20を用いて仮置き領域8の部品Wを最終確定姿勢に変換して部品載置位置7aに載置する。
(もっと読む)
マグネットチャック及び多関節ロボット、ワーク搬送装置
【課題】複数のワークの吸着搬送を簡単に可能とする。
【解決手段】マグネットチャック10は、回転機構11によって回転制御される回転軸12と、その回転軸12に放射方向へ連結される支持部材13,14と、を有し、各支持部材13,14の先端に、吸着面を放射方向外側へ向けて吸着及びその解除作業が単独で制御可能な電磁石15を夫々取り付けて、ワークWの吸着又はその解除動作を行うことにある。
(もっと読む)
ロボットハンド
【課題】チャックの開閉を検出するセンサに接続される電線の断線の可能性を低減させるロボットハンドを提供する。
【解決手段】ロボットハンドは、産業用ロボットのアームに装着されるハンド本体部31と、ハンド本体部31に接続されるとともに、被把持物を把持するチャック4の取付けが可能なハンド先端部32とを備え、ハンド先端部32は、チャック4に設けられ当該チャック4の動作を検出可能なセンサSNに電線84を介して接続される副プリント基板64を有し、ハンド本体部31は、副プリント基板64と電気的に接続される主プリント基板61を有している。
(もっと読む)
ロボットハンド
【課題】ロボットハンドの周りに配置されるハンド着脱手段およびチャックへのエアー供給用の外部配管構成を簡素化できるロボットハンドを提供する。
【解決手段】ロボットハンド3は、産業用ロボットのアームに装着されるハンド本体部31と、エアーEfを用いたシリンダCLの駆動によってワークを把持するチャック4の取付けが可能なハンド先端部32とで構成されている。ハンド本体部31は、エアーEfを用いたシリンダ380の駆動によりハンド先端部32の着脱を行う着脱部38を有し、外面に設けられたエアー入口開口350から供給されるエアーEfをエアー溜め5eに溜める。そして、エアー溜め5e内のエアーEfがチャック4のシリンダCLおよび着脱部38のシリンダ380に供給される。これにより、ロボットハンド3の周りに配置される着脱部38およびチャック4へのエアー供給用の外部配管構成を簡素化できる。
(もっと読む)
作業具の移動装置およびローダ装置
【課題】 共通の駆動源で作業具を2軸方向に移動可能で、構成が簡略な作業具の移動装置を提供する。
【解決手段】 移動装置1は、作業具2を、レール3に沿って移動させ、かつレール3と交差する方向に移動させる。走行用駆動源7,8を搭載し、レール3上を走行する第1および第2走行体4,5と、これら第1および第2走行体4,5の間に位置し、レール3上を走行する中央走行体6と、この中央走行体6にレール3方向と交差する方向に移動自在に設けられ、作業具2が取付けられる移動部材12とを備える。一端が第1走行体4に固定され、中間部が、中央走行体6に設けた第1案内点15、移動部材12に設けた中間案内点17、中央走行体6に設けた第2案内点16の順に巻き掛けられ、他端が第2走行体5に固定された巻掛体18を設ける。
(もっと読む)
ロボットハンド
【課題】チャックの把持制御に用いる電磁弁の有効利用が図れてコストダウンに寄与できるロボットハンドを提供する。
【解決手段】ロボットハンド3は、産業用ロボットのアームに装着されるハンド本体部31と、ハンド本体部31に着脱自在で、エアーEfを用いたシリンダCLの駆動によってワークを把持するチャック4の取付けが可能なハンド先端部32とで構成されている。そして、ハンド本体部32は、外面に設けられたエアー入口開口350を始端とする1本の流路35pからエアーEfが供給される流路5pの終端に接続する入力ポートと、ハンド本体部31の内部に形成された流路5q、37pを介してハンド先端部32にエアーEfを供給する出力ポートとを備えた電磁弁50を有している。これにより、別個のハンド先端部32間でハンド本体部31の電磁弁50の共有化が促進されるため、電磁弁50の有効利用が図れてコストダウンに寄与できる。
(もっと読む)
保持手段駆動装置
【課題】電子部品を順次移動させ工程処理を施すにあたり、電子部品に対する精密な荷重管理を可能とし、荷重制御の高精度化を実現可能な保持手段駆動装置を提供する。
【解決手段】ボイスコイルモータ1403は、電圧と加える推力が比例関係であることを利用して、制御装置1406を通じて所定の電圧が加えられることで、操作ロッド1401に対して一定の推力を与えている。このボイスコイル1403では、操作ロッド1401に加える一定の推力の範囲内において、操作ロッド1401により吸着ノズル1101を介して電子部品3に荷重を加えることで反作用的に加わる当該操作ロッド1401からの反作用荷重が必要以上に大きくならないよう保障する。
(もっと読む)
ロボットハンド
【課題】ロボットハンドの周りに配置されるチャックへのエアー供給用の外部配管を削減できるロボットハンドを提供する。
【解決手段】ロボットハンド3は、産業用ロボットのアームに装着されるハンド本体部31と、エアー駆動によりワークを把持するチャック4の取付けが可能なハンド先端部32とで構成されている。このロボットハンド3の内部には、外面に設けられた1つのエアー入口開口350を始端とする1本の流路35pから、電磁弁50の入力ポートに終端が接続した流路5pにエアーを供給する経路が形成されるとともに、電磁弁(切換弁)50の出力ポートからチャック取付け面320のエアー出口開口32jまで各流路5q、37p、32pが形成されている。このようなロボットハンド3の内部配管を設けることにより、ロボットハンド3の周りに配置されるチャック4へのエアー供給用の外部配管を削減できる。
(もっと読む)
塗装用ロボット
【課題】必要な塗装ガンに切り換えできる塗装用ロボットを提供する。
【解決手段】ロボット10は、塗料を噴射する第1噴射口11aを先端部に有する第1塗装ガン11、及び塗料を噴射する第2噴射口12aを先端部に有する第2塗装ガン12を筒状のアーム1の先端部に備える。回転軸3は、軸方向がアーム1の長手方向と略直交してアーム1の先端部に回動自在に支持された第1塗装ガン11の基端部、及び第2塗装ガン12の基端部を両翼に取り付けて、第1噴射口11aと第2噴射口12aとを互いに異なる位置に配置する。第1の駆動手段4は、アーム1の内部に配置されて、回転軸3を回動させる。第1の駆動手段4は、第1塗装ガン11又は第2塗装ガンのいずれか一方が被塗装物を塗装可能に回動させる。
(もっと読む)
1 - 20 / 35
[ Back to top ]