
Fターム[3C007EV23]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 付加機能を有するもの (310) | 補助当接部材を別途有するもの (84)
Fターム[3C007EV23]に分類される特許
1 - 20 / 84
ロボットハンド
【課題】種々の大きさや形状の部品を十分な把持力で把持することが可能なロボットハン
ドを提供する。
【解決手段】互いの距離を変更可能に設けられた複数の指部の間で対象物を把持する動作
を行うロボットハンドにおいて、複数の指部の間に、指部の根元側と指部の先端側とを結
ぶ方向に沿って移動可能な掌部を設けておく。こうすれば、複数の指部の間に対象物を把
持するとともに、把持した対象物に掌部を当接させることができる。従って、対象物と複
数の指部との間に生ずる摩擦力と、掌部が対象物を支持する力とによって、種々の大きさ
や形状の対象物を十分な把持力で把持することが可能となる。
(もっと読む)
ワーク取り出し方法

【課題】ワークの状態に関係なく密集した複数のワークの中から任意のワークを簡単に取り出すことができるワーク取り出し方法を提供する。
【解決手段】本発明に係るワーク取り出し方法によれば、検出されたワークWの位置及び姿勢に基づき任意のワークWが第1方向D1に押し動かされる。こうしてワークW上に第1チャック15aで把持可能な第1把持領域A1が確保される。その結果、第1チャック15aはワークWの第1把持領域A1を確実に把持することができる。その後、ワークWの一端が持ち上げられて、第2チャック15bが把持可能な第2把持領域A2が確保される。その結果、第2チャック15bはワークWの第2把持領域A2を確実に把持することができる。こうしてワーク取り出し装置1は、ワークWの状態に関係なく密集した複数のワークWの中から任意のワークWを簡単に取り出すことができる。
(もっと読む)
荷搬送アームおよび荷搬送アームを備えた荷搬送ロボット
【目的】複雑な制御を必要とせず荷物を傷つけずに保持できる荷搬送アームおよび荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体には、左右一対のアームを設け、アームの前腕21には、荷を当接支持する手先部30を軸35に回転可能に設けた。手先部30は、荷に当接する当接面30Aを有し、当接面30Aを前腕21の長手方向に垂直に付勢するねじりコイルバネ36の一端を固定し、ねじりコイルバネ36の他端は前腕21に固定されている。荷搬送ロボットは、荷の表面に当接面30Aを当接させるように前腕21を可動させ、荷の表面の向きに合わせて手先部30を軸35を中心に回転させる。当接面30A全体を荷の表面に当接させた状態で、前腕21を可動させ、手先部30を介して軸35にて荷の荷重を受けて、荷を移動させる。
(もっと読む)
ワーク搬送方法および装置
【課題】姿勢矯正手段を用いる必要なしに、ワークを常に適正に、かつ十分強固に把持して、所期した通りの姿勢で所定の作業ステーションまで、ワークを常に確実に搬送することができるワーク搬送方法を提供する。
【解決手段】中空もしくは中実の軸部3と、軸部3の中間部に設けられたフランジ部4とを具え、基準面1上に載置されるワーク2の、フランジ部4を基準面1と直交する向きに押圧して、該フランジ部4の周面を基準面1上に線もしくは面接触させて、前記軸部3の中心軸線を基準面1に平行にした状態で、開閉駆動される一対のフィンガー12,12により、ワーク2のフランジ部4の周面を把持して、該ワーク2を所定の作業ステーションまで搬送する。
(もっと読む)
荷搬送ロボット
【目的】荷物を安定して支持することができる荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、左右一対のアーム17を設けるとともに荷物の下面を支持するための台座部25を突出するように設けた。アーム17は本体16に対し、2つの回転軸にて回転可能な肩18と、肩18に対し1つの回転軸にて回転可能な中腕20と、中腕20に対し1つの回転軸にて回転可能な前腕21とを有している。また前腕21の先端には荷を当接支持する手先部30を設けた。アーム17は肩18、上腕19、中腕20、前腕21を介して手先部30を変位させて荷物を本体16に引寄せるように移動させるとともに、台座部25の上面を荷物の下面に位置させる。荷搬送ロボットは、手先部30にて荷物を当接支持するとともに、台座部25にて荷物の下面を支持するため、荷物を安定して支持することができる。
(もっと読む)
荷搬送ロボット
【目的】荷物を安定して支持することができる荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、左右一対のアーム17を設けるとともに荷物の下面を支持するための台座部25を突出するように設けた。アーム17は本体16に対し、2つの回転軸にて回転可能な肩18と、肩18に対し1つの回転軸にて回転可能な中腕20と、中腕20に対し1つの回転軸にて回転可能な前腕21とを有している。また前腕21の先端には荷を当接支持する手先部30を設けた。アーム17は肩18、上腕19、中腕20、前腕21を介して手先部30を変位させて荷物を本体16に引寄せるように移動させるとともに、台座部25の上面を荷物の下面に位置させる。荷搬送ロボットは、手先部30にて荷物を当接支持するとともに、台座部25にて荷物の下面を支持するため、荷物を安定して支持することができる。
(もっと読む)
基板搬送装置および基板搬送システム
【課題】基板カセットと基板受け渡し先との間でガラス基板の受け渡しを効率良く行うことのできる廉価でコンパクトな構成の基板搬送装置を提案すること。
【解決手段】基板搬送装置2は、ガラス基板7の縁端をクランプしエアー浮上させた状態で、基板カセットからガラス基板7を引き抜くので、狭い間隔で高密度に収納されているガラス基板を引き抜くことができ、エアー浮上状態でガラス基板7を移動させるので、ガラス基板に損傷、異物付着が生じない。基板載置面に引き込まれたガラス基板を基板支持アームで支持し、この状態で基板搬送装置2が収納先の基板カセットまで移動し、基板支持アームによってガラス基板を引き渡し先に渡す。一台で基板カセットからのガラス基板の引き抜き、移送、基板受け渡し先への引き渡しを行うことができ、設置スペースが少なくて済む廉価でコンパクトな基板搬送システムを構築できる。
(もっと読む)
搬送ロボット
【課題】ワークを搬送するときの位置決め精度を確保することができると共に、ワーク運搬用箱を搬送する際にエンドエフェクタに対して作用するモーメント荷重をほとんどなくすことができ、エンドエフェクタに必要とされる許容モーメントを小さくすることができる搬送ロボットを提供すること。
【解決手段】搬送ロボット1は、把持部5によってワークを把持するときには、ロック機構部6によってバランスハンド部4を原位置に固定してエンドエフェクタ21を移動させるよう構成してある。搬送ロボット1は、把持部5によってワーク運搬用箱8Bを把持するときには、ロック機構部6によってバランスハンド部4の原位置への固定を解除することにより、バランスハンド部4、把持部5及びワーク運搬用箱8Bを合わせた重心Gが揺動軸42の下方に位置するようバランスハンド部4が揺動した状態で、エンドエフェクタ21を移動させるよう構成してある。
(もっと読む)
クランパ、水室内作業装置およびクランプ方法
【課題】管材を安定的にクランプ保持できるクランパ、水室内作業装置およびクランプ方法を提供すること。
【解決手段】このクランパ23は、管板137に配置された管材132に挿入されて管材132をクランプする。また、クランパ23は、管板137あるいは管材132に当接可能な当接部2311bを有すると共に挿入部2311aを管材132に挿入して管材132をクランプするクランプ機構231と、クランプ機構231を挿入部2311aの挿入方向に昇降させる昇降機構232とを備えている。
(もっと読む)
把持装置、ロボットシステム及び把持方法
【課題】把持対象物を把持する際に把持対象物を高精度に位置決めすること。
【解決手段】多指ハンド3は、掌部12と関節17,18を有する複数の指部13とを備え、掌部12及び複数の指部13で工具7を把持する。掌部12は、工具7の把持対象物側接触面25に接触させる掌部側接触面12aを有している。掌部側接触面12aには、把持対象物側接触面25に設けられた突起部26,27が挿入される穴部19,20が設けられている。そして、穴部19,20に突起部26,27が挿入されることにより、掌部側接触面12aの接線方向Tに対する工具7の位置決め及び掌部側接触面12aの法線nを回転軸心とした回転方向Rに対する工具7の位置決めがなされる。
(もっと読む)
ICタグホルダー着脱装置、ICタグホルダーの装着方法ならびにICタグホルダーの取り外し方法
【課題】ICタグを装着したICタグホルダーを管体に着脱するICタグホルダー着脱装置を提供する。
【解決手段】複数の支持脚4を有し、該複数の支持脚4が開脚しようとする弾性力により管体内部に定着されるICタグホルダー3を固定可能な保持具8を先端に有するアーム7と、該保持具8によるICタグホルダー3の固定および固定の解除を操作する保持具操作手段と、前記アーム7に対して摺動可能、かつ、前記管体に挿入可能に設けられた筒状体5とを有し、該筒状体5のアーム7に対する摺動により、前記保持具8で固定したICタグホルダー3の支持脚4を前記筒状体5へ出し入れして、該支持脚4の開閉を可能としたことを特徴とするICタグホルダー3の着脱装置。
(もっと読む)
ロボットハンド、およびロボット
【課題】グリッパー型ロボットハンドと同程度に単純な構造でありながら、人間型ロボッ
トハンドのように高い汎用性を有するロボットハンドを提供する。
【解決手段】指部の先端側の腹部の一部を、別部材(指先部材)を用いて構成し、この指
先部材は、指部に収納した状態と、指部から突出した状態とに切り換え可能とする。また
、把持する対象物を検出する圧力センサーは、指先部材に設けておく。こうすれば、大き
な対象物や重い対象物については、指先部材を収納して指部の腹部で把持することで、し
っかりと把持することができる。また、小さな対象物については、指先部材を突出させて
、指先部材で把持する。何れの場合でも圧力センサーは1つでよいので、構造を単純化す
ることができる。
(もっと読む)
把持装置と方法
【課題】一度に、複数の対象物を把持して搬送できるようにすることにある。
【解決手段】対象物1を挟んで把持する1対の把持爪3a、3bと、1対の把持爪を動作可能に支持して空間内を移動する支持移動体7と、を備える。1対の把持爪3a、3bは、支持移動体7に対して往復動方向に駆動されることで、互いに近接して対象物1を挟み、または、互いに離間して該対象物を解放するようになっている。さらに、1対の把持爪3a、3bの間に位置し、1対の把持爪が把持した対象物1を保持する保持機構8を備える。1対の把持爪3a、3bに把持された対象物1が、当該把持から解放されるように保持機構8内の奥側に移動させられて、当該奥側で保持機構8に保持され、この状態で、1対の把持爪3a、3bが、別の対象物1を把持できるように構成されている。
(もっと読む)
ハンドリング装置およびハンドリング方法
【課題】
あるワークと挟持方向に弾性を有する他のワーク とを同時に挟持可能である軽量なハンドリング装置およびハンドリング方法を提供する。
【解決手段】
第1ワークと挟持方向に弾性を有する第2ワークとを挟持するハンドリング装置であって、連動された第1可動爪と第2可動爪と、対向配置された固定爪とを備え、第1可動爪と固定爪との間隔、および第2可動爪と固定爪との間隔とが、所定の条件を具備し、第1可動爪と固定爪とで第1ワークを挟持し、第2可動爪と固定爪とで第2ワークを挟持する。
(もっと読む)
搬送装置及び真空装置
【課題】搬送物や周囲の雰囲気温度が比較的低い環境下においても当該温度が高い環境下においても搬送物を確実に保持して高速搬送を図るとともに、搬送物の搬送時におけるダストをできるだけ少なくする技術を提供する。
【解決手段】本発明の搬送装置50は、駆動源からの動力が伝達される複数のアームを有する伸縮自在なリンク機構20と、リンク機構20の動作先端部において第3の左アーム3L、第3の右アーム3Rを介して連結され基板10を載置するための載置部5とを備える。載置部5の基板搬送方向下流側の部位に、リンク機構20の動作に伴い、基板10の側部と当接して基板10をリンク機構20に向かう方向へ付勢する下流側付勢機構7が設けられ、載置部5の基板搬送方向上流側の部位に、リンク機構20の動作に伴い、基板10の側部と当接して基板10を基板搬送方向へ付勢する上流側付勢機構9が設けられている。
(もっと読む)
搬送装置及び搬送方法
【課題】収容物の出し入れを行う面を下側とし、その面のフラップの封止を行うことなく、かつ、収容物の脱落を防止しつつ箱体を搬送する。
【解決手段】開閉自在な左右一対のフラップ201を底面に有する箱体200の搬送装置であって、前記箱体200を保持する保持ユニット10と、保持ユニット移動手段とを備え、前記保持ユニット10は、前記箱体200の上面又は側面において前記箱体200を保持し、前記箱体200を昇降させる昇降手段11と、前記一対のフラップ201のそれぞれに当接し前記フラップ201の開放を規制する一対の当接部材14と、前記一対の当接部材14が前記箱体の下方において互いに近接して前記フラップ201の開放を規制する開放規制位置と、前記一対の当接部材が前記箱体の下方において互いに離間して前記フラップの開放を許容する開放許容位置と、の間で前記一対の当接部材を移動させる当接部材開閉作動手段12とを備えた。
(もっと読む)
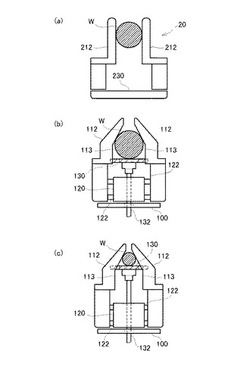
被把持体の把持装置
【課題】本発明は、被把持面と前記被把持面と交わる端面を有する柱状の被把持体を把持する把持装置であって、鉛直軸に沿い長軸が配置される前記被把持体の被把持面を把持する把持部と、前記被把持体の端面が当接する当接部を有する把持装置において、被把持体を所望の姿勢で把持可能なコンパクトな被把持体の把持装置を提供することを目的としている。
【解決手段】本発明に係わる被把持体の把持装置は、被把持面と前記被把持面と交わる端面を有する柱状の被把持体を把持する把持装置であって、鉛直軸に沿い長軸を位置決めすべき前記被把持体の被把持面を開閉して把持する把持部と、前記被把持体の端面が当接する当接部と、前記被把持体の端面と前記当接部を離接させるとともに前記当接部と前記被把持体の端面との間に所定の間隙を形成する間隙形成部とを有することを特徴とする被把持体の把持装置である。
(もっと読む)
ウェーハ搬送装置及びウェーハ搬送方法
【課題】本発明の目的は、ウェーハ収納用カセット内に載置されているウェーハの載置位置がずれている場合であっても、容易に、ウェーハの位置を修正し、ウェーハを保持・搬送できるウェーハ搬送装置及び方法を提供することにある。
【解決手段】ロボットハンド10が、ウェーハ下方の空間32内を水平移動可能でかつ、水平移動時に保持すべきウェーハ20の周縁部の高さ位置HWよりも大きな高さ寸法HYをもつウェーハ位置調整手段13とを有することを特徴とする。
(もっと読む)
治具用ロボットハンドとこれを用いた治具の取付け/取外し方法
【課題】ワークの位置や姿勢にばらつきがある場合でも、ワークと干渉することなく、ワークに治具を正確に取付け/取外しすることができる治具用ロボットハンドとこれを用いた治具の取付け/取外し方法を提供する。
【解決手段】ワーク1に治具8を取付け/取外しする治具用ロボットハンド10。ワーク1又はこれに固定された固定部材5に設けられた嵌合孔7と嵌合する嵌合部分12bを先端部に有し、嵌合部分12bと嵌合孔7との嵌合により、治具の取付け/取外し方向にその軸線が位置決めされる円筒形のガイドロッド12と、搬送ロボット9のハンド取付部9aに取り付けられ、ガイドロッドの末端部12eをガイドロッドの移動及び揺動に追従可能に保持する追従機構14と、治具8を把持/開放可能な把持装置16と、把持装置をガイドロッドの軸線に沿って昇降させる昇降装置18とを備える。
(もっと読む)
把持装置
【課題】溝形部材の把持後に溝形部材の姿勢調整を必要としない把持装置を提供することを課題とする。
【解決手段】把持装置40は、ロアサッシュ12の底壁71に当接する第1当接部43と、連結部材18の下面73に当接する第2当接部45と、第1電動モータ46で回転させられることでロアサッシュ12の側壁72の凸部15に係合する第1凹部49及び側壁75の凸部16に係合する第1凹部48が設けられている第1係合部51と、第2電動モータ52で回転させられることで凸部15、16に係合する2つの第2凹部が設けられている第2係合部56とを備えている。
【効果】把持装置40に対するロアサッシュ12の位置決め精度が向上するので、把持装置40に対するロアサッシュ12の姿勢調整が不要になる。したがって、ロアサッシュ12の把持後にロアサッシュ12の姿勢調整を必要としない把持装置40を提供することができる。
(もっと読む)
1 - 20 / 84
[ Back to top ]