
Fターム[3C007HT03]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | 可撓性部材 (556) | チェーン (25)
Fターム[3C007HT03]に分類される特許
1 - 20 / 25
産業用ロボット
【課題】2本のアームを個別に伸縮させることが可能であっても、2本のアームの伸縮動作や本体部に対する回動動作を安定させることが可能な産業用ロボットを提供すること。
【解決手段】第1アーム5は、第1アーム部11と、第1アーム部11に保持される第2アーム部12とを備え、第2アーム6は、第3アーム部13と、第3アーム部13に保持される第4アーム部14とを備えている。ロボット1では、第1アーム5と第2アーム6とを個別に伸縮させることが可能となっている。また、ロボット1では、第1アーム部11の回動中心と第3アーム部13の回動中心とは同軸上に配置されるとともに、第1アーム5と第2アーム6とは、第1アーム5および第2アーム6が縮んでいる状態で仮想線Lに対して略線対称になるように構成され、第1アーム部11と第3アーム部13と第2アーム部12と第4アーム部14とは、上下方向においてこの順番で配置されている。
(もっと読む)
多関節アームおよび搬送装置

【課題】並進する多関節アームを提供する。
【解決手段】多関節アーム100は、ベース10と第1のリンク110で連結した第1のアーム101と、第1のアーム101と中間リンク130で連結した第2のアーム102と、第2のアーム102と第2のリンク120で連結したエンドエフェクタ200とを含む。第1のリンク110は、第1のアーム101に対して同期して動く第1の駆動歯車111と、ベース10に対して同期して動く第1の伝達歯車112とを含む。中間リンク130は、第2のアーム102に対して同期して動き、第1の伝達歯車112とタイミングベルト139により接続された中間の駆動歯車131と、第1のアーム101に対して同期して動く中間の伝達歯車132とを含む。第2のリンク120は、エンドエフェクタ200に対して同期して動き、中間の伝達歯車132とタイミングベルト129により接続された第2の駆動歯車121を含む。
(もっと読む)
作業具の移動装置およびローダ装置
【課題】 共通の駆動源で作業具を2軸方向に移動可能で、構成が簡略な作業具の移動装置を提供する。
【解決手段】 移動装置1は、作業具2を、レール3に沿って移動させ、かつレール3と交差する方向に移動させる。走行用駆動源7,8を搭載し、レール3上を走行する第1および第2走行体4,5と、これら第1および第2走行体4,5の間に位置し、レール3上を走行する中央走行体6と、この中央走行体6にレール3方向と交差する方向に移動自在に設けられ、作業具2が取付けられる移動部材12とを備える。一端が第1走行体4に固定され、中間部が、中央走行体6に設けた第1案内点15、移動部材12に設けた中間案内点17、中央走行体6に設けた第2案内点16の順に巻き掛けられ、他端が第2走行体5に固定された巻掛体18を設ける。
(もっと読む)
ロボットアームおよびロボット
【課題】 小型化および軽量化を図るのに好適なロボットアームを提供する。
【解決手段】 ロボットアーム300は、ナット324を直線運動させるリニアアクチュエータ310と、リニアアクチュエータ310の直線運動方向の一端に配置され、リニアアクチュエータ310の直線運動方向と直交する方向を軸心として回転関節14に固定されたプーリ350aと、リニアアクチュエータ310の直線運動方向の他端に配置され、プーリ350aの軸方向を軸回りに回転可能なプーリ350bと、プーリ350a、350bに取り付けられ、ナット324が固定されたベルト360とを備える。
(もっと読む)
パレタイザーのためのハンドリングロボット
本発明によれば、ハンドリングロボットは垂直伸縮マスト(11)を含み、垂直伸縮マスト(11)は、垂直に固定されたベース(20)及び同期された動作の複数のセクション(21〜23)を備え、前記動作は速度及び加速度が制御され且つ重力伸長動作及び動力退避動作を含み、それぞれのセクションは個々に駆動され、最後のセクション(23)はパレットに載せられる製品(3)を把持するためのヘッド(13)を担う。該ロボットは、異なるセクション(21〜23)を動かすための共通の駆動シャフト(30)を含み、前記シャフト(30)は、それらがそれぞれ伝達部材を経由して操作するセクション(21〜23)の移動に適した直径を有するホイールを含む。ホイール(31、32)及びそれらのセクション(21、22)の間の伝達部材は、対応するホイール上に巻き付くベルトから構成される。把持ヘッドを担う最後のセクション(23)に関しては、伝達動作がチェーンにより実行される。ハウジング(46)は、各動作伝達チェーンの自由端を受容して、格納し、それぞれ曲がったらせん経路を規定するノッチを備えたブロックの形態で作られる。 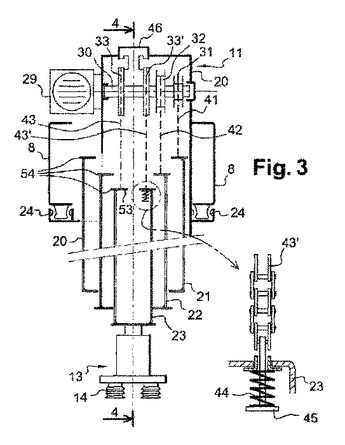 (もっと読む)
(もっと読む)
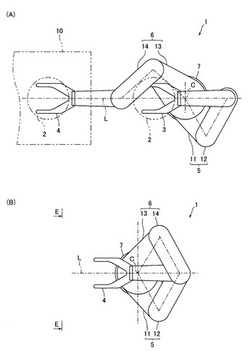
搬送用ロボット
【課題】機器間のスペースが少なくても設置することができ、且つ、製造コストを少なくすることができる搬送用ロボットを提供すること。
【解決手段】第1アーム14の基端を基部11に対して回転可能に連結すると共に、第1アーム14の先端を第2アーム16に対して回転可能に連結した。また、第1アーム14の回転軸(第1回転軸13)と、第2アーム16の回転軸(支軸15)を平行にした。そして、基部11に第1プーリ24を固定すると共に、支軸15を中心として、第2プーリ25を第2アームと一体的に回転するように固定した。さらに、第2アームの基端に、第1アーム14に対して回転しないように第3プーリ28を固定すると共に、第2回転軸32を中心として、保持部が取り付けられる第4プーリ30を第2アームの先端に回転可能に固定した。
(もっと読む)
平行リンク駆動機構及びこの駆動機構を備えた搬送装置
【課題】アームの長さを長くしても小さい駆動力でスムーズに移動できる駆動手段を有する平行リンク駆動機構を提供すること。
【解決手段】一対の第1、第2アーム41、42と、一対の第1、第2連結アーム43、44とを平行に配設し、第1、第2連結アームのいずれか一方を静止アーム、他方を運動アームとして、静止アームの端部と第1、第2アームの一端部とを第1、第2支軸61、62及び第1、第2アームの他端部と運動アームの他端とを第3、第4軸支63、64をそれぞれ回動自在に支軸した平行リンク機構3と、この平行リンク機構を駆動する駆動手段と、を有し、静止アーム43には駆動手段GMを設け、駆動手段と運動アームの第3、第4支軸63、64との間に、伝動部材5を襷掛けに懸架して、駆動手段GMの駆動により、第3、第4支軸63、64のいずれか一方の支軸に結合された部分の伝動部材5A、5Bを牽引して運動アーム44を移動させる。
(もっと読む)
溶接ロボット
【課題】いろいろな大きさのパネルに対応可能な溶接ロボットを提供する。
【解決手段】パネル1上に仮設でき且つ直列に接続可能なレール2と、パネル1上を転動する車輪14を有する台車3とを備え、レール2と同方向に延びる長尺部材をパネル1に固着するためのMIG溶接トーチ5を台車3に装着し、ローラチェーン8をレール2の全長にわたって取り付け、ローラチェーン8に噛み合って転動し得る駆動スプロケット16を台車3に設けている。
(もっと読む)
多関節ロボット
【課題】自重及びワーク質量による撓みを減少させ、アームの全長が長く設定されていても、ワークの長距離の搬送を精度良く行う。
【解決手段】多関節ロボット10は、水平に回動する第1アーム50と、第1アーム50の回動中心に対して同軸の扇形の支持板18と、第1アーム50と平行なサブアーム58と、第1アーム50及びサブアーム58の各先端に接続された連結部材52とを有する。支持板18には円弧レール40が設けられている。第1アーム50、サブアーム58及び連結部材52は平行リンクを構成する。円弧レール40は、第1アーム50の上面に設けられた係合部100と係合する。連結部材52には第2アーム54が回動自在に設けられ、該第2アーム54の先端には第3アーム56が回動自在に設けられいている。第3アーム56の先端には、ワークWを吸着するエンドエフェクタ59が設けられている。
(もっと読む)
ロボットの関節機構
【課題】1つの駆動源により複数の関節をそれぞれ駆動させることができる関節機構を提供することを課題とする。
【解決手段】ロータ4を回転して出力軸部材5をステータ2に対し傾動すると、出力軸部材5の傾動に伴って第1節B、第2節C及び第3節Dが互いの相対姿勢を保持したままステータ2に対し傾動する。ロータ4を回転して出力軸部材5をそれ自身の軸回りに回転すると、出力軸部材5の回転に伴って第1の傘歯歯車6が回転することにより、第2の傘歯歯車8が第2関節の軸S1の回りに回転して第2節Cが第1節Bに対し傾動する。また、このとき、第1の傘歯歯車6の回転に伴って第3の傘歯歯車9も回転することにより、第4の傘歯歯車10及び第5の傘歯歯車11を介して第6の傘歯歯車12が第3関節の軸S2の回りに回転して第3節Dが第2節Cに対し傾動する。
(もっと読む)
脚と車輪を有する移動体
【課題】脚で胴体部を支持し、各脚の足部および関節部に車輪を有する移動体であって、同じモータの数で、車輪機能が増し、車輪走行状態、脚歩行状態、いずれにおいても休止しているモータがない移動体を提供する。
【解決手段】移動体10は、脚12で胴体部11を支持し、各脚が関節部で回動可能に連結された上脚12aと下脚12bからなり、各脚の足部、関節部、股部に車輪13を有する。各車輪13にそれぞれ内蔵されかつブレーキを内蔵する複数のインホイールモータ15と、各車輪の回転速度を減速する複数の減速機20と、該減速機による減速速度を連動する連動装置22とを備え、複数のインホイールモータを同期駆動して各車輪を回転させ、複数のインホイールモータを差動駆動して上脚と下脚を揺動させる。
(もっと読む)
ロボットアーム
本発明にかかるロボットアームの代表的な構成は、必要に応じて連結される1つまたは複数の枢動式レバーから形成されるロボットアームであって、枢動式レバーが、支持材、基部、枢動可能な部品および複数の空気圧人工筋を備え、基部が、支持材の一方の端部に強固に接続され、枢動可能な部品が、支持材の長手方向から発散するように位置合わせされる1つまたは2つの軸を中心にして枢動可能である支持材の第2の端部上に装着され、空気圧人工筋が、基部から枢動可能な部品まで伸張し、個別の空気圧人工筋が、枢動可能な部品の枢軸の対向する側で枢動可能な部品に係合し、連結される枢動式レバーの場合には、1つの枢動式レバーの基部が、このように連結される次の枢動式レバーの枢動可能な部品に強固に接続され、
コントローラが、個別の枢動式レバーの位置および個別の空気圧人工筋に印加される圧力を測定して、個別の空気圧人工筋の圧力−変位図と、空気圧人工筋に設けられるすべての枢動式レバーに関する幾何的なレバー比を含むことによって、外部から作用される力を計算し、これらの力を制限することを特徴とする。  (もっと読む)
(もっと読む)
単軸ロボット
【課題】大きな駆動力を有するモータや大型のブレーキが不要とする上下方向駆動型の単軸ロボットを提供する。
【解決手段】上下方向に延びるケース部材に、軸方向に移動可能に取り付けられた可動部材3を有する単軸ロボットにおいて、回転可能なプーリ43をケース部材の上端に設け、一端側に前記可動部材が取り付けられるとともに他端側にバランスウエイト41を取り付けられたベルト部材42を前記プーリに架け渡すことによって、前記可動部材と前記バランスウエイトとがプーリを介して移動可能に構成する。
(もっと読む)
平行保持機構
【課題】リンクの干渉を避け、比較的大きい作業領域を確保することができ、部品点数が少なく組立が容易であり製作コストを減少することができる平行保持機構を提供する。
【解決手段】平行保持機構10は、回転ジョイント22aが固定され所定長dの直径を有するプーリー12aと、回転ジョイント22bが回転ジョイント22aに対して平行を保持する位置に固定され直径dを有するプーリー12bと、両プーリーを各々回転自在な状態で接続したリンク14と両プーリーを繋ぎ且つ両プーリーを同期して回転させるタイミングベルト16とを備えている。固定された状態で両回転ジョイントの長手方向は相互に平行となっている。タイミングベルト16により両プーリーが回転すると、両回転ジョイント長手方向はyz平面内で常に平行となるため平行リンク機構の動きと同様の動きを実現できる。3自由度の空間並進平行保持機構30には平行保持機構10を用いる。
(もっと読む)
溶湯搬送装置
【課題】 一般的に市販されている6軸などの多関節ロボットアームを用い、他の制御機構を設けなくてもよく、アームの先端に駆動力の伝達機構を持つ延長部材を取付けてラドルの駆動制御を行う溶湯搬送装置を提供する。
【解決手段】 多間接ロボットアームの先端にラドルを駆動できるように設けた溶湯搬送装置において、前記多間接ロボットアームの先端にはアームの長さ方向の軸を中心に回転する駆動部が備えられ、前記回転する駆動部の駆動力をラドルの上下駆動に用いることを特徴とする。
(もっと読む)
金属部品取出装置並びに金属部品取出方法
【課題】 容器内での部品間のブリッジ現象の発生を防止するとともに容器内の部品数が少なくなっても適量の部品を取り出すことが可能であり、且つ作業性に優れる金属部品取出装置並びに金属部品取出方法を提供すること。
【解決手段】 上端に開口部を備える一端有底円筒状の容器を回転させるとともに支持する回転基台と、前記開口部を介して前記容器内外へ上下に電磁石を移動させる上下移動機構と、前記電磁石を水平に移動させる水平移動機構からなる金属部品取出装置であって、前記水平移動機構の第1位置において、前記上下移動機構は、前記容器内部に収容された金属部品を取り出すために前記電磁石を上下に移動させ、該電磁石の上下移動が、前記回転基台の回転中心から離れた前記容器の内壁近傍で行われることを特徴とする金属部品取出装置である。
(もっと読む)
チェーン駆動式ロボットアーム
【課題】製品保管および払い出しシステムにおける製品を搬送するロボットアームを開示する。
【解決手段】このロボットアームは、主に、アームを払い出しシステムに接続可能な基部と、基部に接続したスプロケットと、基部に接続した伸縮可能なアームセグメントと、スプロケットと伸縮可能なアームセグメントとを接続したチェーンとを備え、スプロケットの回転によって、チェーンが動き、さらに伸縮可能なアームセグメントが伸長する。このロボットアームは、製品が密に収納された、間隔の狭い棚に適した、コンパクトで効率の良い取り扱いツールを提供する。
(もっと読む)
荷重取扱装置におけるアーム自重のバランス方法とその機構
【課題】 仮想定比槓杆タイプのアーム機構を備えた荷重取扱装置における上記のようなアーム流れ現象を生じさせないアーム機構の新たなバランス方法とそのための機構を提供すること。
【解決手段】 複数のアーム1〜7がリンク結合された仮想定比槓杆タイプのアーム機構Amであって、その姿勢を変化させることができるアーム機構Amのアーム先端側に支持させた負荷Wを、そのアーム機構Amの後端側に伝達される昇降駆動力13によって昇降させるとき、そのアーム機構自体の自重を、前記昇降駆動力13とは別に設けた駆動力24によって支持することにより、当該アーム機構自重と前記の別の駆動力24とを平衡させること。
(もっと読む)
回動伝達装置
回動伝達装置においては、第1遊星ギヤ機構は、第1ギヤ、第2ギヤ、第1遊星ギヤ体及び第1キャリア体を有している。第2遊星ギヤ機構は、第3ギヤ、第4ギヤ、第2遊星ギヤ体及び第2キャリア体を有している。第3ギヤ、第4ギヤ及び第2遊星ギヤ体のピッチ円径比は、第1ギヤ、第2ギヤ及び第1遊星ギヤ体のピッチ円径比と同じである。第1ギヤ、第2ギヤ及び第1キャリア体のうちのいずれか1つである連結要素は、連結要素に対応する要素と一体に回動するようになっている。第1基体側要素は第1基体に接続され、第2基体側要素は第2基体に接続されている。第1基体側要素に対応する要素と第1回動体との間で回動が伝達され、第2基体側要素に対応する要素と第2回動体との間で回動が伝達される。  (もっと読む)
(もっと読む)
水平アームを有するロボット
【課題】水平方向のアームの遊びを除去し、バネ定数を向上させることによって停止時、加減速時の振動及び軌跡の振れを除去して高剛性で制御性の良いアームとすることができる水平アームを有するロボットを提供する。
【解決手段】水平アームを水平面内で回動する駆動軸に片側方向への回動力であるバネ力を付与した水平アームを有するロボットにおいて、このロボットは複数の水平アーム12,13,14を有するとともに、シリンダ31による直線移動をラック30、ピニオン33で回転駆動力に変換し、この駆動力を、隣接するアーム間に設けたチェーン34,35の動力伝達手段を介して各アームの駆動軸に伝達することにより各駆動軸に片側方向への回動力であるバネ力を付与した構成とする。
(もっと読む)
1 - 20 / 25
[ Back to top ]