
Fターム[3C007JS02]の内容
マニピュレータ、ロボット (46,145) | 制御装置の具体的構成 (854) | 制御盤等を含むシステム全体の構成 (484) | 他のロボット等周辺装置と関連するもの (448)
Fターム[3C007JS02]の下位に属するFターム
ネットワーク対応 (181)
Fターム[3C007JS02]に分類される特許
161 - 180 / 267
モーション習得システムおよびモーション習得方法

【課題】従操作者の動きが主操作者に戻ることなく、主操作者の動きを従操作者に十分教示できるようにする。
【解決手段】操作システム31で抽出した操作者Oの動作を、トレーナシステム51で再現する。トレーナシステム51は、操作者Oの動作を第1加速度応答として出力する仮想トレーナ57と、操作者O’の操作力に応じた第1等価加速度が加えられる可動可能なマスタシステム55と、環境E’からの反作用力に応じた第2等価加速度が加えられる可動可能なスレーブシステム56と、を備えている。さらに仮想トレーナ57,マスタシステム55,およびスレーブシステム56の間で、仮想トレーナ57に対して非同期にマスタシステム55とスレーブシステム56を加速度制御するマルチラテラル制御手段63を備えている。
(もっと読む)
工業用ロボット

【課題】工業用ロボットにおいて、補助装置の独立動作時にマニピュレータとの同期を可能とする。
【解決手段】制御装置13は、メインプログラム31によりマニピュレータ11を動作せさるマニピュレータ制御部32と、ポジショナ用プログラム36A,36Bによりポジショナ12A,12Bを制御するポジショナ制御部33A,33Bを備える。メインプログラム35は参照切換手段42A,42Bによりポジショナ用プログラム36A,36Bが算出したポジショナ12A,12Bの目標関節角度Jp_nowを参照可能である。
(もっと読む)
自動機械システムおよびその制御方法
【課題】ネットワークを介して有線通信又は無線通信でコントローラと教示装置を接続する自動機械システムにおいて、複数台のロボットの中から特定のロボットのコントローラと接続する場合には、複数台ロボットの配置図を教示装置上に表示することで、作業者が直感的に特定のロボットを選択することが可能な自動機械システムを提供する。
【解決手段】
1つ以上の駆動機構を備える複数の自動機械1と、前記自動機械を駆動制御するコントローラ2と、前記自動機械を操作する教示装置3と、を備えた自動機械システムにおいて、前記教示装置は、前記コントローラとネットワークを介して通信を行う通信部と、前記複数の自動機械の配置図を表示する表示部8と、接続対象とする自動機械を選択するための選択手段15と、を備える。
(もっと読む)
搬送ロボット、真空装置
【要 約】
【課題】処理対象物を高速で搬出入できる搬送ロボット及び真空装置を提供する。
【解決手段】搬送室21内に、第一、第二の駆動軸35、45に第一、第二のアーム30、40が取り付けられた搬送ロボと23を配置する。第一、第二の駆動軸35、45は、第一、第二のアーム30、40が収縮して最小半径で回転したときに、第一、第二の駆動軸35、45に衝突しない程度に離間させ、且つ、第一、第二のアーム30、40の高さを異ならせ、回転の最小半径が重なる程度に近接させても互いに衝突しないようにしておく。設置面積が少なく、高速搬送可能な搬送ロボット23が得られる。
(もっと読む)
信号通信システム
【課題】娯楽装置と同様に患者のリハビリテーション運動のためのプラットフォームを提供する。
【解決手段】ロボット装置のアクチュエータと通信する動作センサであって、人間に取り付けられており、この人間の動作を測定する動作センサを具え、前記動作センサが電源と送受信機と通信し、前記送受信機が前記ロボット装置の中央処理ユニットと通信し、前記中央処理ユニットがセンサ信号を受信して処理し、前記センサが検出した入力を前記アクチュエータに通信し、前記人間による位置、速度、加速度および力の入力を検出し、前記ロボット装置の動きを前記人間の測定した動作に対応させる。
(もっと読む)
移動装置、ならびにその制御システム、制御プログラムおよび監督システム
【課題】人間等の物体の挙動変化を誘発する頻度を抑制しながら、当該物体との接触を回避して移動または行動しうる移動装置等を提供する。
【解決手段】判定面において基準空間要素Q0に接触する可能性があるという接触条件を満たす第1空間要素Q1の有無が判定される。基準空間要素Q0および第1空間要素Q1のそれぞれはロボット1および物体xのそれぞれの現在像を表す。その結果、当該判定面において接触条件を満たす第1空間要素Q1が存在すると判定された場合、当該判定面において基準空間要素Q0が第2空間要素Q2との接触を回避しながら移動しうる経路が新たな「第1行動計画要素」として設定される。
(もっと読む)
移動装置、ならびにその制御システム、制御プログラムおよび監督システム
【課題】人間等の物体の挙動変化を誘発する頻度を抑制しながら、当該物体との接触を回避して移動または行動しうる移動装置等を提供する。
【解決手段】ロボット1の代表点軌道のうち少なくとも一部を含む判定面において、基準空間要素Q0に接触する可能性があるという接触条件を満たす第1空間要素Q1の有無が判定される。基準空間要素Q0および第1空間要素Q1のそれぞれはロボット1および物体xのそれぞれの現在像を表す。その結果、接触条件を満たす第1空間要素Q1が存在すると判定された場合、代表点軌道の変更を伴う第2行動計画要素が仮定された上で新たな判定面において接触条件を満たす第1空間要素Q1の有無があらためて判定される。その結果、当該新たな判定面において接触条件を満たす第1空間要素Q1が存在しないと判定された場合、当該仮定どおりに新たな「第2行動計画要素」が設定される。
(もっと読む)
部品ハンドリング装置、システム及び方法
本発明は、部品をハンドリングするため、例えば、プレス・ラインに部品をローディング及びアンローディングするために、使用される改善された部品ハンドラ装置に係る。この部品ハンドラは、二つの産業用ハンドラまたはロボット(R1,R2)の内の第一に、取り付けられて設けられ、且つ前記産業用ハンドラのベースと、前記産業用ハンドラのグリッパ(G)手段を有するエンド・エレメントとの間の、動力学的なチェインを形成する。この部品ハンドラは、前記産業用ハンドラ(R1,R2)のアームのエンド・エレメントに接続されるようにデザインされたリジッドなアーム、及び、前記産業用ハンドラのエンド・エレメントに対する、前記リジッドなアームの径方向の動きのための、少なくとも一つのスイベル手段(2)を、更に有している。 (もっと読む)
無線通信及びロボット工学を利用して空間内の位置を正確且つ精密に突き止めてマーキングするためのシステム
マスターステーションと、マスターステーションの制御下に置かれているサブステーションを備えているシステムは、多次元空間のグラフィック図をリアルタイムで生成することができる。多次元空間の物理的寸法諸元と同空間の中の物体及び/又は構造物の所在位置と方位に関する情報は、両ステーションの間でやり取りされる。マスターステーションは、自動的に、多次元空間のN次元グラフィック表示を、リアルタイムで、即ち、サブステーションから情報を受信しながら、そして、自身の測定装置を用いて情報を取得しながら、生成することができる。マスターステーションは、ユーザーに多次元空間を表示し、これにより、ユーザーが多次元空間内を案内される(即ち、進んでいくことができる)ようにする。 (もっと読む)
移動ロボット及び移動ロボットの制御装置
【課題】移動中に無線基地局との通信が切断される状態を回避する移動ロボットを提供する。
【解決手段】移動ロボットは、予め作成された無線環境マップを利用して、自己位置認識部201によって認識したスタート位置と、管理用コンピュータによって指示された目的位置とによって定められる移動経路上における無線環境マップに記録された無線環境データに基づいて、最大移動速度決定部204によって、移動経路を移動するときの最大移動速度を決定する。そして、移動速度指示部205によって、最大移動速度決定部204で決定した最大移動速度を上限とする移動速度で移動するように移動制御部130に指示し、移動機構を駆動して移動する。
(もっと読む)
移動ロボット、並びに、移動ロボットの制御装置、移動ロボットの制御方法及び移動ロボットの制御プログラム
【課題】無線通信が切断される場所に移動した場合であっても、自律的に無線通信を復旧できる場所に移動することが可能な移動ロボットを提供する。
【解決手段】移動ロボットは、移動領域の地図データと、当該移動領域における無線環境に関連する複数の無線環境データで構成した総合無線環境データとを対応付けた無線環境マップを記憶した記憶部140と、移動領域内における自己位置を認識する位置認識部201と、無線環境の状態を監視する監視部202と、無線通信が切断された状態となった場合に、無線環境マップに基づいて、無線通信の接続が可能な復旧位置を探索する探索手段203と、自己位置から復旧位置までの移動を移動制御部130に指示する移動指示部204aと、を備える。
(もっと読む)
複数のロボット制御装置用電源装置からなる電源システム
【課題】ロボット制御装置用電源装置の台数によらずリモートコントロール信号のドライブ能力は1台分でよく、さらに上位コントローラを使用しなくても同期制御することができる複数のロボット制御装置用電源装置からなる電源システムを提供する。
【解決手段】ロボット制御装置用電源装置4は、次段のロボット制御装置用電源装置4に対してリモートコントロール出力信号を出力するリモートコントロール信号出力部3と、+24V系の第1のリモートコントロール信号入力部2と、+5V系の第2のリモートコントロール信号入力部15を備え、第1のリモートコントロール信号入力部2のリモートコントロール信号と第2のリモートコントロール信号入力部15の電源コントロール信号の2系統のコントロール信号に基づいて直流電源8をオン/オフ制御する。
(もっと読む)
ロボットシステム
【課題】ロボットが高い精度で自己位置を認識し、デッドレコニングの累積誤差を補正することができるロボットシステムを提供する。
【解決手段】ロボット1と環境装置24とを含み、ロボット1は、通信部4を介した環境装置24からの動作指令に従って移動部21により動作環境を移動し所定の動作を行うロボットシステムであって、通信部2、4は、光信号の点滅により情報を授受する光通信手段を備え、ロボット1は、画像認識部を備え、画像認識部にて光信号の点灯位置を認識することにより動作環境における自己の位置を補正する。
(もっと読む)
移動するワークピースを加工するための加工システム
加工システム(10)が、産業用ロボット(16)によって、移動するワークピース(12)の加工を行い、産業用ロボット(16)を、ワークピース(12)及び/又は移動可能なワーク担持ユニット(14)に一時的に固定結合させることができ、産業用ロボット(16)は、非結合動作位置(42)で、能動的に作用する駆動ユニット(20)によってワークピースとは無関係に移動させることができる担持デバイス(18)によって担持され、結合動作位置(44)で、浮動軸受システム(22)によって、担持デバイス(18)に対して浮動に取り付けられ、さらに、産業用ロボット(16)の制御ユニット(36)及び/又は少なくとも1つの製造ユニット(40)が、担持デバイス(18)上に配置されることを特徴とする。 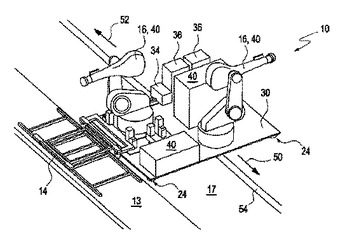 (もっと読む)
(もっと読む)
ロボット装置及びその制御方法
【課題】 ロボット間でコミュニケーションをとることができるロボット装置及びその制御方法を提供する。
【解決手段】 ロボット装置の内部状態を示す信号パターンを記憶する信号パターン記憶回路4と、他のロボット装置の内部状態を示す信号パターンを検出する信号検出回路2と、上記信号検出回路2により検出された情報と上記信号パターン記憶回路4に記憶されている情報とを信号比較回路5により比較して、上記他のロボット装置の内部状態を認識する。
(もっと読む)
自律移動型ロボット
【課題】屋外での広範囲における監視を効率的に行うことを可能とする自律移動型ロボットを提供する。
【解決手段】周辺状況を観測しつつその観測情報に基づいて自律して移動可能な自律移動型ロボットRにおいて、自己の行動地域M−Aを記憶する行動地域記憶手段5Eと、他の自律移動型ロボットとの間で行動地域をやりとりする通信手段5G,10と、自己の行動地域M−Aと他の自律移動型ロボットの行動地域M−B,・・・とに基づいて、自己の担当監視地域Raを決定する担当監視地域決定手段5Fと、自己の担当監視地域Ra内で異常を検出する異常検出手段5L,5Mと、を備え、異常検出手段5L,5Mにより異常が検出されたときに、所定の通報先への通報及び警告の少なくともいずれかを行う。
(もっと読む)
ロボットの制御装置およびロボットの軌跡制御方法
【課題】溶接線の途中からウィービング動作や溶接条件を変化させ、溶接施工継手に適応した溶接を行う。
【解決手段】教示時に、ウィービング動作の方向と、始点におけるウィービング動作の第1の振幅Xおよび終点におけるウィービング動作の第2の振幅Yと、溶接線上に存在し終点から所定距離離れた点Nとを指定し、ロボットが始点から指定点に到達するまでは第1の振幅Xでウィービング動作するとともに、指定点Nから終点に到達するまでは、第1の振幅Xから第2の振幅Yへ振幅を補間しつつウィービング動作する。
(もっと読む)
自律移動装置と遠隔制御装置の間の通信システムおよび自律移動装置
【課題】複数の基地局の何れかを経由して自律移動装置と遠隔制御装置の間で通信を行う通信システムにおいて、通信を中継する基地局を切換える際の回線断を抑制する。
【解決手段】本発明の通信システムは、自律移動装置と、その自律移動装置と無線を介して通信可能な複数の基地局と、その複数の基地局のそれぞれと通信可能であって、その複数の基地局のうち何れかを経由して自律移動装置との間で通信を行う遠隔制御装置と、その複数の基地局のそれぞれと通信可能であって、その複数の基地局を制御する基地局制御装置を備えている。その自律移動装置は、少なくとも所定の時間間隔で電波を送信する。その基地局制御装置は、自律移動装置からの電波のそれぞれの基地局における受信状態に応じて、遠隔制御装置と自律移動装置の間の通信を中継する基地局を切換える。
(もっと読む)
溶接ロボットシステム
【課題】溶接機の接続状態の設定において、手入力による設定ミスを削減し、設定ファイルを選び易くする溶接ロボット制御装置を提供する。
【解決手段】溶接ロボット制御装置から接続している各溶接機に順に駆動命令を送信し、ワイヤ送給装置から受信する信号の変化により、当該溶接機に対応しているマニピュレータを特定し、溶接ワイヤの材質及びワイヤ径の情報を入手し、当該溶接機が返信する情報により、当該溶接機の機種及び当該溶接機に接続されているワイヤ送給装置の種別を入手することで手入力を減らして設定ミスを削減し、収集した情報から条件に合う設定ファイルを選択して表示することで選び易くする。
(もっと読む)
ロボットシステム
【課題】教示対象として選択を意図してないロボットの動作を防止する。
【解決手段】複数のロボット101,102と、各ロボットの駆動源を駆動するサーボアンプ31,32と、各ロボットの教示操作を行うための一台の操作装置20と、教示対象となる一台のロボットを選択するための第一の選択手段91,92及び第二の選択手段21,22と、第一の選択手段と第二の選択手段とでそれぞれ選択されたロボットが一致する場合にのみに当該ロボットに対して前記教示操作に基づく動作制御を行う制御回路50とを備えている。
(もっと読む)
161 - 180 / 267
[ Back to top ]