
Fターム[3C007JS02]の内容
マニピュレータ、ロボット (46,145) | 制御装置の具体的構成 (854) | 制御盤等を含むシステム全体の構成 (484) | 他のロボット等周辺装置と関連するもの (448)
Fターム[3C007JS02]の下位に属するFターム
ネットワーク対応 (181)
Fターム[3C007JS02]に分類される特許
101 - 120 / 267
除塵システム及び除塵ロボット
【課題】除塵作業後の被除塵物に粉塵が再付着するのを抑止する。
【解決手段】粉塵拭き取り用又は粉塵掃き取り用のワイプ部材4を備える除塵ロボット6を設け、搬送手段により搬送される被除塵物2をワイプ部材4で除塵する除塵用動作を除塵ロボット6に実行させる構成にするとともに、被除塵物2から離れた位置に設定した清掃域でワイプ部材4の清掃が実施可能なように、除塵用動作後のワイプ部材4を清掃域に移動させる清掃用動作を除塵ロボット6に実行させる構成にする。
(もっと読む)
自動機械システム

【課題】シフト動作を簡単に実現する自動機械システムを提供する。
【解決手段】ワークをクランプする1台のマスタ自動機械と、マスタ自動機械と連動して動作しそれぞれ溶接トーチが取り付けられた1台以上のスレーブ自動機械とから構成されワークに対して多層盛溶接を行う自動機械システムであって、スレーブ自動機械の座標系上におけるワークのセット誤差によるワークのずれ量を検出し、これに追従するように教示位置を反映させるためのスレーブ座標系シフト量を入力するスレーブ座標系シフト量入力部と、スレーブ座標系シフト量をマスタ自動機械の座標系上のシフト量に変換するマスタ座標系シフト量変換部と、を備えて構成する。
(もっと読む)
手術マニピュレータシステム
【課題】目標となる操作点への処置具の移動を簡易かつ迅速に行うことができ、術者にかかる負担を低減する。
【解決手段】患者Aの術部を抑えるスタビライザ9を先端に備えるスタビライザ用マニピュレータ4と、該スタビライザ用マニピュレータ4により抑えられた術部を処置する処置具10を先端に備える1以上の操作用マニピュレータ5と、これらマニピュレータ4,5を制御する制御装置6とを備え、スタビライザ用マニピュレータ4および操作用マニピュレータ5が、相互に対応づけられた座標系を有し、スタビライザ用マニピュレータ4に備えられたスタビライザ9に処置すべき目標位置の位置座標が固定され、制御装置6は、術部にスタビライザ9が配置されて術部が抑えられたときに、スタビライザ9に固定されている目標位置近傍に処置具10を配置するように操作用マニピュレータ5を制御する手術マニピュレータシステム1を提供する。
(もっと読む)
ボルト締付装置
【課題】機械的に対策することなく、ナットランナによってボルトをパルス締付により締め付ける際に、ナットランナが取り付けられたロボットの振動を低減することができるボルト締付装置を提供すること。
【解決手段】ロボット30に取り付けたナットランナ20によってボルトをパルス締付により締め付けるボルト締付装置10において、ロボット30の動作を制御するロボットコントローラ35と、ナットランナ20の動作を制御するナットランナコントローラ21と、を有し、ナットランナコントローラ21は、ナットランナ20によるボルトの締付制御情報をロボットコントローラ35へ送信し、ロボットコントローラ35は、ボルトのパルス締付の際に発生するロボット30の振動を低減するように、ロボット30の動作を制御するための制御信号を締付制御情報に基づいて生成し、その制御信号をロボット30に送信する。
(もっと読む)
移動体の位置情報取得システム及び取得方法
【課題】移動体の位置情報を正確に取得することができる移動体の位置情報取得システムを提供する。
【解決手段】本発明の移動体の位置情報取得システム1は、移動体の装着体8に設けられたイナーシャセンサ3と、床7の裏面又は表面に敷設され、位置情報を有する無線IDタグ2と、移動体の装着体8に設けられ、無線IDタグ2の位置情報を読み取る無線IDタグリーダ4と、無線IDタグ2の位置情報に基づいて移動体の現在の位置情報を取得すると共に、イナーシャセンサ3の検出情報に基づいて移動体の移動軌跡の近似式を作成し、無線IDタグ2の位置情報に基づいて近似式を補正し、当該補正した近似式を用いて移動体の将来の予想位置情報を取得する処理手段5と、イナーシャセンサ3の検出信号、移動体の位置情報及び移動ロボット10の移動経路情報を格納する記憶手段6と、を備える。
(もっと読む)
機器制御システム
【課題】操作端末を複数の機械装置で共用化することができ、尚且つ安全性の高い機器制御システムを提供する。
【解決手段】複数のロボット装置1−1〜1−nと、任意に選択した一台のロボット装置に対して動作を教示するティーチングペンダント2とを備える産業用ロボットシステムであって、複数のロボット装置1−1〜1−nそれぞれは、自機器に固有のキーが挿入されることによってのみ第1の状態と第2の状態との切り替えが可能となるシリンダーを有し、ティーチングペンダント2は、各ロボット装置に固有のキー4−1〜4−nのいずれが挿入されても教示が行える状態と教示が行えない状態との切り替えが可能となるマスターシリンダー10と、教示対象となるロボット装置に対して接続要求を送信する接続要求送信手段とを有している産業用ロボットシステム。
(もっと読む)
干渉チェック制御装置および干渉チェック制御方法
【課題】制動動作中におけるロボットの構成部分同士の干渉の有無を高精度に判定する。
【解決手段】動作領域に重複部分を有するロボット同士の干渉チェック制御装置であって、速度・位置記憶手段910と、干渉判定領域の閾値をあらかじめ記憶する干渉判定用閾値記憶手段918と、速度・位置データに基づいて制動開始から停止までに必要な時間を計算する制動時間計算手段911と、制動開始から制動完了までの各構成部分間の最近接距離の履歴を、接近する各構成部分の速度に基づいて推定するロボット間距離推定手段916と、各構成部分間の最近接距離の履歴と干渉判定領域の閾値とを比較し、制動期間中の干渉の有無を判定する干渉判定手段917と、干渉判定結果に応じて各ロボットに対する移動指令値を作り出すとともに、ロボットの速度・位置データを速度・位置記憶手段に記憶させる指令値生成手段919とを備える。
(もっと読む)
乗員保護装置
【課題】ロボット側の負荷を抑制しつつ、適切なタイミングでロボットのエアバックを展開することができる乗員保護装置の提供。
【解決手段】本発明は、車両に同乗するロボット10を備える乗員保護装置1であって、前記ロボットは、該ロボットと人間との乗車位置関係から車両衝突時に人間と衝突する可能性がある部位にエアバック14と、該エアバックを制御する制御装置12とを備え、該制御装置は、車両衝突の発生を表す車両衝突信号を車両側から通信により受信した場合に、前記エアバックを展開することを特徴とする。
(もっと読む)
オフライン教示データの作成方法及びロボットシステム
【課題】ロボット、特に当該ロボットを搭載したスライダの適切な教示データを自動的かつ効率的に作成する。
【解決手段】ロボットの据付ベースを移動させるスライダを動作させながらワークに対して連続した作業を行なうロボットシステムにおいてスライダ位置を決定する方法は、初期位置等を設定するステップ(S100〜S103)と、ロボット原点を通る探索平面内にて離散的に設定された格子点が、ワーク上の作業位置に合致するようにスライダの位置を設定して、そのスライダの位置における各格子点の評価値を算出するステップ(S106)と、評価値が最高値である格子点が溶接点になるように、スライダの位置を決定するステップ(S109)とを含む。探索平面は作業位置を中心として回転させることで、最適なスライダの位置を設定できる。
(もっと読む)
画像認識装置を使用した安全監視システム
【課題】壁状のエリアセンサーを通過しない進入者や進入物は感知することができず、その状態で作業用ロボットが作動してしまい事故となる危険性を有していた。
【解決手段】外部から区分けされた一定の作業エリアEの全部を監視可能な撮影機10と、撮影機10と接続する画像処理装置11と、画像処理装置11と接続する治具制御盤9、治具制御盤9と接続するロボット制御盤8とを有し、撮影機10により全ての作業エリアEを撮影してその作業エリアEの画像を画像処理装置11に送り、作業者2がワークセットエリア内で治具にワークセットを行う場合、作業用ロボットを停止させるとともに、作業用ロボット5が稼働中は、作業エリアE内に進入物を画像処理装置が認識した場合、作業エリアE内の全ての電源遮断、作業用ロボット5の非常停止させる画像認識装置を使用した安全監視システムによる。
(もっと読む)
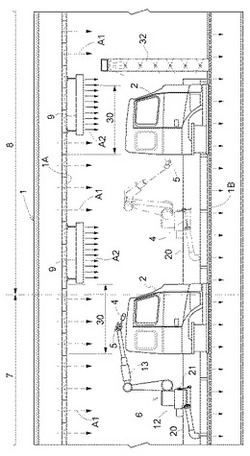
直列および/または並列配置された複数の多軸ハンドリング装置からなる複合装置の制御方法ならびにデータ記憶媒体、制御システムおよび複合装置
【課題】柔軟性に優れ同時に信頼性に優れた複合装置のための制御方法を提供する。
【解決手段】方法では、それぞれ多次元の作業運動および/またはハンドリング運動を行なうための直列および/または並列配置された複数の多軸ハンドリング装置(1)と、対象物(3)を一緒に運ぶための少なくとも1つの搬送装置(2)とからなる複合装置が柔軟性よくかつ最適に制御される。ハンドリング装置(1)が、それぞれ運ばれる対象物(3)の拾上げ、加工および降ろしのために設けられている。本発明によれば、一緒に運ばれる対象物(3)の1つ以上の搬送装置(2)におけるハンドリング装置装置(1)の多次元の運動系列のための案内値が、例えば印刷機、製紙または圧延設備等におけるように同期動作をともなう分散された多軸システムにおける案内値のようにモデル化される。
(もっと読む)
ロボットシステム
【課題】大サイズのワークを複数のロボットによって支持しても、所望の作業軌跡に沿った加工作業を行うことができるロボットシステムを提供にする。
【解決手段】ワークを工具で加工する加工装置と、加工制御装置と、ワーク把持用ハンドを備えた複数のロボットと、加工制御装置および複数ロボットを制御するロボット制御装置とを備え、複数ロボットによってワークを移動させながら工具でワーク上の目標加工線に沿って加工を行うロボットシステムにおいて、ハンド先端を原点とするツール座標系における目標加工線に対応する基準点の移動軌跡を演算周期毎に求め、第1ロボットのハンド先端位置を演算して、第1ロボットのハンド先端位置をその位置へ移動させ、第2ロボットのハンド先端位置が第1ロボットのハンド先端位置と相対的な位置関係を一定に保って工具の軌跡が目標加工線と一致するようにワークを工具に対して移動させるようにした。
(もっと読む)
ロボット制御システム、ロボット制御システムの実行方法およびそのプログラム
【課題】ロボットセルの機能変更に伴う、ハードウェアおよびソフトウェアの変更作業を簡素化することができるロボット制御システムを提供する。
【解決手段】N個(但し、NはN≧2となる整数)のロボットセルCEと、N個のロボットセルCEからアクセス可能な共有メモリマップを有するインターロックサーバ10と、から成るロボット制御システムSYであって、共有メモリマップは、N個のロボットセルCEのうち、アクセス可能なM個(但し、Mは2≦M≦Nとなる整数)のロボットセルを示すロボットコードと、当該M個のロボットセル間におけるインターロック制御のために当該M個のロボットセルのみによって読み書きされるインターロック情報と、を対応付けたものである。
(もっと読む)
ロボット制御システム
【解決手段】 第1支持手段7の第1ベース11の支持面には碁盤目状の縦横の仮想線が想定され、それらの各交点はアタッチメントA1〜A3を取り付け可能な取り付け位置となっている。各アタッチメントA1〜A3の底面には係合ピンAbが突設されており、それを上記取り付け位置のいずれかの係合孔11Aに嵌合することで、各アタッチメントA1〜A3をベース11に取り付けることができる。
オペレータは、作業開始前に予め各アタッチメントA1〜A3の取り付け位置のアドレスを制御装置6に教示する。制御装置6は上記教示内容を認識した上で、ロボット3のグリッパ3Bで各容器B1〜B3を把持して他の位置へ移送する。
【効果】 形状が異なる容器であっても、アタッチメントを交換するだけで容器の位置を容易に教示することができる。
(もっと読む)
制御装置
【課題】ロボットを停止させる条件を容易に設定できる制御装置を得ること。
【解決手段】ロボットの制御を行なう制御装置において、使用者の操作に応じたロボット停止に関する第1の信号を出力する装置内停止指示入力部2と、第1の信号および装置外停止指示入力部4から送られてくる使用者の操作に応じたロボット停止に関する第2の信号がロボット停止条件を満たす場合に、ロボットを停止させるための通常停止信号12を出力する停止制御回路10と、停止制御回路10から通常停止信号12が出力された場合に、ロボットの動作を停止させるコンタクタ制御回路9と、ロボット停止条件を変更する条件変更指示が外部入力されると、条件変更指示に応じた回路となるよう停止制御回路10の回路を変更する停止条件変更部3と、を備える。
(もっと読む)
ワークの把持方法および装置
【課題】柔軟物であるワークの形状や位置を認識し、把持するための方法および装置の提供。
【解決手段】フィンガーの姿勢変換を3自由度で行うワークの把持装置であって、ロボットアームへの取付面(105)を有し、取付面(105)に対する法線方向に中心軸をもつ回転軸駆動部(101)と、回転軸駆動部(101)に、回転軸駆動部(101)の中心軸と所定の角度α1を構成する中心軸をもつように接続された回転駆動部(102)と、回転軸駆動部(102)に、回転軸駆動部(102)の中心軸と所定の角度α2を構成する中心軸をもつように接続された回転駆動部(103)と、回転駆動部(103)に接続された柔軟物であるワークを保持するためのフィンガー機構と、これらの作動を制御するロボットコントローラと、を備え、前記ロボットコントローラは、フィンガー機構の姿勢を計算することによりワークを所望の把持姿勢で把持するワークの把持装置。
(もっと読む)
ロボットおよびプレス機械を含むシステム、複数のロボットを含むシステム、ならびにそのようなシステムにおいて使用されるロボットの制御装置
【課題】同期動作を続行して、システムの作業効率が低下するのを避ける。
【解決手段】互いに協働するロボットとプレス機械と(以下、ロボット等)を含むシステム(1)は、時刻を周期的に更新する基準時計(6)を備えており、ロボット等は、内部時計(19)と、ロボット等の動作時におけるロボット等のそれぞれの位置を前記内部時計の時刻に対応して記憶した教示プログラム(25)と、内部時計の時刻が基準時計の時刻に一致するように内部時計の時刻を補正する内部時計補正手段(21)と、内部時計補正手段によって内部時計の時刻を基準時計の時刻に一致させられない場合には、内部時計の時刻が基準時計の時刻に一致するように基準時計の時刻を補正する基準時計補正手段(23)と、教示プログラムと内部時計の時刻とに基づいて、ロボット等の補間時間毎の動作指令を算出することにより、ロボット等を基準時計に同期して動作させる動作手段と、を具備する。
(もっと読む)
三次元自動領域によるマルチアームロボットシステムの干渉検査
【課題】衝突回避制御システムにおいて、三次元およびリアルタイムの衝突検出、ロボット運動の前もったロボットシステムへの通信、衝突しないプログラム軌道の条件および重要な工程経路の保護を提供する。
【解決手段】本発明によるシステムは一連の命令を含み、その一連の命令は干渉検査自動領域方法を行うために、一連の命令を実行するコントローラに格納されている。干渉検査自動領域方法は、第一のプログラム経路に沿った第一ロボットの動作時に占有される、共通空間の第一の部分を決定する工程と、第二のプログラム経路に沿った第二ロボットの動作時に占有される、共通空間の第二の部分を決定する工程と、第一の部分および第二の部分の間に重複部分が存在するか否か決定するために、第一の部分および第二の部分を比較する工程と、重複部分の存在に対応して第一ロボットおよび第二ロボットを動作させる工程とを含む。
(もっと読む)
ロボット用位置同定方法および装置
【課題】ロボットの与えられた作業動作を環境に合わせて補正可能として、簡易な設置方法でのロボットの運用を可能とするとともに、ロボットを環境の変化に迅速に対応させ得るようにすることにある。
【解決手段】作業用の複数の撮像手段7と作業腕4とを持つ移動可能なロボット1の、少なくとも作業台Tを含む位置同定対象物に対する相対位置を同定するに際し、前記位置同定対象物に設けたマークCMを前記複数の撮像手段で互いに異なる複数の方向から撮像し、前記マークを撮像した複数の方向に基づき前記相対位置を求めることを特徴とする、ロボット用位置同定方法である。
(もっと読む)
荷役物搬送装置
【課題】大きな設置スペースを必要とせず、設備コストが少ない、常に作業者が操作する必要がなく、ジブクレーンとロボットの動作を同期させるための特別な制御が必要なくロボットに過大な負荷がかかるリスクが少ない荷役物搬送装置を提供。
【解決手段】それぞれ床30に固定された、荷役物搬送用バランサーアーム 6と、教示された動作プログラムに基づいてプレイバック再生運転可能なロボット 7と、からなり、バランサーアーム 3を駆動するエアーシリンダ 4の圧力は、ハンド装置 2が把持する荷役物 1の荷重に応じて調節されるようにされ、ロボット 7の先端の接続機構 9とバランサーアーム 3先端25のハンド装置 2を被接続機構11とを結合又は固着させた状態で、ロボット 7を作動させてバランサーアーム 3の先端25を動かしてハンド装置 2を作動させて荷役物 1を把持し、搬送するようにした。
(もっと読む)
101 - 120 / 267
[ Back to top ]