
Fターム[3C007JS02]の内容
マニピュレータ、ロボット (46,145) | 制御装置の具体的構成 (854) | 制御盤等を含むシステム全体の構成 (484) | 他のロボット等周辺装置と関連するもの (448)
Fターム[3C007JS02]の下位に属するFターム
ネットワーク対応 (181)
Fターム[3C007JS02]に分類される特許
41 - 60 / 267
料理プロセス指示装置及び料理プロセス指示方法
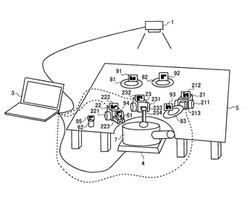
【課題】料理タスクを実行するロボットに対して料理プロセスを簡単な方法で指示することが可能な技術を提供する。
【解決手段】少なくとも材料の投入、材料の混ぜ又は返し、及び、材料の加熱を含む、複数の料理タスクを実行するロボットに対して、料理プロセスを指示するための料理プロセス指示装置であって、前記各料理タスクに対応するアイコンと、前記アイコンを並べるための時間軸と、を表示し、ユーザにポインティングデバイスの操作で前記アイコンを前記時間軸上に並べさせる料理プロセス入力部と、前記料理プロセス入力部において前記時間軸上に並べられた前記アイコンの種類及び位置に基づいて、前記ロボットに該並べられたアイコンに対応する料理タスクを実行させる順番及びタイミングと前記ロボットに該料理タスクを実行させるための動作とを計算し、前記ロボットに対して制御命令を送出する制御部と、を備える。
(もっと読む)
教示ライン補正装置、教示ライン補正方法、及びそのプログラム

【課題】基準部位の相関関係が異なっていた場合も、その誤差の影響を緩和し、ティーチングデータを精度良く補正するための教示ライン補正装置、教示ライン補正方法、及びそのプログラムを提供する。
【解決手段】予め設定された基準部位の第1基準位置aと第2基準部位の第2基準位置bとを通る線を含む平面であり、且つ、第3基準部位の第3基準位置cで決定される第1平面を規定し、検出した第1基準部位の位置a´と、検出した第2基準部位の位置b´とを通る線を含む平面であり、且つ、検出した第3基準部位の位置c´で決定される第2平面を規定し、第1基準部位を原点とし、原点の前記第1基準部位の前記第1基準位置が、検出した原点の前記第1基準部位の位置と同じ位置になり、且つ、該第1平面が該第2平面と同一平面上となる補正量を算出し、該算出した補正量に基づいて、動作ポイントが教示された基準座標を補正する教示ライン補正部とを備える。
(もっと読む)
N個のロボットを同時に制御するロボット制御装置
【課題】ロボットを容易に追加および削除できると共に低コストで小型にする。
【解決手段】N個(N≧2)のロボット(R1〜Rn)を同時に制御するロボット制御装置は、メイン制御ユニット(MCU)を具備し、メイン制御ユニットは、N個のロボットのそれぞれの動作指令を作成するメインプロセッサ(MP)と、メインプロセッサにより作成された動作指令に基づいてロボットのそれぞれを駆動するサーボモータの動作量を算出するサーボプロセッサ(SP)と、を含んでおり、さらに、メイン制御ユニットに接続された、N個のアンプユニット(AU1〜AUn)を具備し、サーボプロセッサにより算出されたサーボモータの動作量に基づいてN個のロボットのうちの1個のロボットのサーボモータを駆動するサーボアンプ(SA1〜SAn)、を含む。
(もっと読む)
塗装システム
【課題】車体本体に対して揺動可能に連結されたドア等を容易に開状態とすることが可能であり、しかも、作業効率に優れる塗装システムを提供する。
【解決手段】塗装システム10は、塗装ロボット14a〜14dと、オープナーロボット16とを有する。塗装ロボット14a〜14dは、壁24、26に敷設された第1案内レール28に変位自在に係合された走行台車32を介して設けられ、一方、オープナーロボット16は、壁26に敷設された第2案内レール30に変位自在に係合された走行台車34を介して設けられる。このため、塗装ロボット14a〜14dとオープナーロボット16との間には、高低差が存在する。また、オープナーロボット16のアーム部40の先端には、柱状部の先端から互いに逆方向に分岐して延在する第1爪部及び第2爪部を有する略逆T字形状のフック48が設けられる。
(もっと読む)
塗装システム
【課題】例えば、車体本体に対して揺動可能に連結されたドア等を容易に開状態とすることが可能であり、しかも、作業効率に優れる塗装システムを提供する。
【解決手段】塗装システム10は、塗装ロボット14a〜14dと、オープナーロボット16とを有する。例えば、塗装ロボット14a〜14dは、壁24、26に敷設された第1案内レール28に変位自在に係合された走行台車32を介して設けられ、一方、オープナーロボット16は、壁26に敷設された第2案内レール30に変位自在に係合された走行台車34を介して設けられる。
(もっと読む)
ロボット装置及びロボットシステム並びに対象物のハンドリング方法
【課題】より小型でありながらも揺動可能な対象物を安定してハンドリングすることができるようにした、ロボット装置及び対象物のハンドリング方法を提供する。
【解決手段】揺動可能な対象物を支持する第1支持部35を有する第1マニピュレータ21と、第1マニピュレータ21に併設され、揺動可能な対象物を支持する第2支持部35を有する第2マニピュレータ22と、第1マニピュレータ21と第2マニピュレータ22とを動作制御して、対象物を揺動させるロボットコントローラ104と、を有して構成する。
(もっと読む)
ロボット制御装置、ロボット制御システム及びロボット制御方法
【課題】複数のロボットの協調動作における各ロボット制御装置間の同期を精度良く確立する。
【解決手段】複数のロボット4−1〜4−3と、各ロボットを制御する複数のロボット制御装置2、3−1、2とを用い、ロボット制御装置毎に設定される制御周期に同期させて各ロボットを協調動作させるシステムのロボット制御装置であって、マスタ側のロボット制御装置2の制御周期における所定のタイミングで生成された同期信号の入力タイミングと、スレーブ側のロボット制御装置3−1、2の制御周期における所定のタイミングで生成された保持信号の入力タイミングとを検出するタイミング検出部32と、保持信号の出力から所定期間経過後に同期信号と保持信号の各入力タイミングのタイミング差を読み込み、それ基づいてスレーブ側のロボット制御装置3−1、2の制御周期を変化させる制御部31とを備えている。
(もっと読む)
ロボット制御システム
【課題】
操作者がコントローラに設けられた第1接続確認操作手段を操作すると、コントローラの第1表示手段と、可搬式操作部に設けられた第2表示手段が同時に第1接続確認操作手段が操作される前の第1表示状態から第2表示状態に変化するため、操作者が把持している乾式操作部とコントローラの接続関係の誤認識を確実に防止できるロボット制御システムを提供する。
【解決手段】
コントローラ20AとTP10と通信接続が完了した後、コントローラ20Aが教示モードに設定されている際に、操作者がコントローラ20Aに設けられた運転準備ボタン58aを押すと、運転準備ボタン58aの運転準備ボタン表示灯63と、TP10の非常停止ボタン表示灯141aが同時に消灯から点滅パターンに変わるので、操作者が把持しているTP10とコントローラ20Aの接続関係の誤認識を確実に防止できる。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】簡易な構成で容易にロボットを制御するロボット制御装置を得ること。
【解決手段】データを入出力するI/Oエリア内での位置であるI/O番号3Aと、このI/O番号3Aの位置に書き込まれるデータ4Aと、によって定義された指示情報30Aを、所定のプログラム言語で動作するPLC1から受信すると、指示情報30A内の、I/O番号3Aとデータ4Aに基づいて指示情報30Aに応じた動作をロボット5に行なわせるロボットCPU21を有する。
(もっと読む)
溶接ロボット
【課題】従来の、PLC機能を内蔵している産業ロボットにおいて、PLC機能はあくまで入出力状態に関するシーケンス制御を行う機能のみとなっており、溶接を行う溶接ロボットにおける溶接出力データやロボット運転情報をPLC機能でのシーケンス制御に取り込んで処理するといったことはできない。
【解決手段】PLC部と溶接制御部を備え、溶接出力データとロボット運転情報の少なくとも一方をPLC部で動作するシーケンス制御プログラムに基づいて処理できる。また、PLC部で動作するシーケンス制御プログラムで行う処理は、溶接出力データとロボット運転情報の少なくとも一方に対しての上限下限の監視、外部ネットワークへの出力、PLC変数への格納としている。
(もっと読む)
搬送システム,ロボット装置及び搬送方法
【課題】小型のロボットを用いながらも相対的に大重量のワークの搬送を自動化できるようにした、搬送システム,ロボット装置及び搬送方法を提供する。
【解決手段】ワークWを懸垂して支持するクレーンユニット102を水平方向に移動可能とするクレーン移動機構103と、ワークWを支持したクレーンユニットを保持して移動させるマニピュレータユニット101と、を有し、第1位置にあるワークWをクレーンユニットにより支持させ、ワークWを支持したクレーンユニット102を第2位置側に移動させて、支持したワークWを第2位置に載置する。
(もっと読む)
タイヤ又はタイヤ構成部材の製造装置及び製造方法
【課題】タイヤ又はタイヤ構成部材の製造において、ロボットアームによる物体の移動範囲を広くして、ロボットによる作業領域を拡大する。
【解決手段】ロボット1の一対のロボットアーム20を駆動してロボットハンド15を移動させ、ロボットハンド15により物体を保持して移動させる。ロボット本体10を、昇降装置30により上下方向に移動させ、かつ、移動装置40により水平面内の直交する2方向に移動させて、ロボット本体10に設けられたロボットアーム20を、互いに直交する3方向の各方向に移動させる。基部11を中心に胴体部12を旋回させて、ロボットアーム20を旋回させる。制御装置50により3方向への移動や旋回を制御して、ロボットアーム20を各方向に変位させ、ロボットハンド15をロボットアーム20の稼動範囲と変位範囲の任意の位置に移動させる。
(もっと読む)
自動作業システムにおけるロボットの診断方法及び診断プログラム
【課題】 位置決めロボットと作業ロボットとの協調作業の際に生じ得る位置ズレ量を検出してこのズレ量に基づいて位置決めロボット又は作業ロボットに異常が生じたか否かを診断する。
【解決手段】位置決めロボット100が保持ツール105により保持したワークを作業ツール205の目標位置に搬送して位置決めするとともに、作業ロボット200がワークに対し所定の作業を行う際、ロボット制御装置300が、第1のロボットアーム110の先端部位又はワークに設けられた慣性センサ106において検出される慣性力に基づいて保持ツール105の位置ズレ量を検出し、検出した位置ズレ量ΔP1を用いて位置決めロボット100に異常が発生したか否かを検出する。
(もっと読む)
ロボットの制御方法
【課題】 ロボットと位置検出カメラ間の座標軸の回転方向のずれを修正するロボットの制御方法を提供する。
【解決手段】 XY平面上に設定した3点以上の計測位置と前記XY平面に垂直なZ軸方向に設定した2点以上の計測位置に対し、前記ロボットを操作し前記三次元位置計測装置によって前記各計測位置の位置座標を計測し、前記三次元位置計測装置の座標系における各計測位置の位置座標と前記ロボットの動作量に基づいて、前記三次元位置計測装置の座標系から前記ロボットの座標系への変換係数を算出し、前記三次元位置計測装置より計測した対象物の位置情報を前記変換係数によって変換し、この変換した値に基づいて前記ロボットを動作させる。
(もっと読む)
ロボット制御システム及びロボット制御プログラム
【課題】物体の搬送作業を行えるロボットを好適に制御できるロボット制御システムを、提供する。
【解決手段】カメラ画像が表示されているタッチスクリーン上の或る範囲を指定する操作が行われた場合、カメラ画像に対する画像セグメンテーション処理結果を利用して、カメラ画像中の、ユーザが指定した範囲内に所定割合以上の部分が含まれているセグメント群からなる画像を探索し、探索した画像を、搬送対象物の画像として特定(S102)し、特定した画像に基づき搬送対象物をロボットに搬送させる制御処理(S110)を行う。
(もっと読む)
付加軸付きロボットのオフラインプログラム作成装置
【課題】付加軸付きロボットの指定作業動作に基づいて、周辺機器との干渉回避等を考慮した動作プログラムをオフラインで生成するプログラム生成装置を提供する。
【解決手段】プログラム生成装置は、ロボットの作業目標に対応するアーム先端の位置姿勢を指定する手段と、付加軸付きロボットと周辺機器との間の最短距離が予め定めた干渉余裕より小さい場合はアーム先端の位置姿勢は保持したまま付加軸を移動させ、付加軸付きロボットと周辺機器との間の最短距離が干渉余裕より大きくなる複数の付加軸位置を算出する手段と、求められた複数の付加軸位置のそれぞれに対し、所定の評価関数により評価値を求め、該評価値が最も高い付加軸の位置を選択する手段と、付加軸付きロボットの作業目標に対応するアーム先端の位置姿勢と選択した付加軸位置から付加軸付きロボットの教示点を作成する手段と、を備える。
(もっと読む)
インストルメントパネルの取付装置及び取付方法
【課題】車室内にインストルメントパネルを高精度に取り付けることを可能にするインストルメントパネルの取付装置及び取付方法を提供する。
【解決手段】ボディ14の取付ブラケット110は側面に開口するインパネ取付孔111a、111bを備える。インストルメントパネル24は、ボルト150がインパネ取付孔111a、111bを介して挿通される側方固定孔25a、25b及び把持穴26を備える。インストルメントパネルの取付装置10は、インパネ支持アーム72と、インパネ支持アーム72の側面に設けられた基準ターゲット77と、側方から撮像する撮影部100とを有し、画像データ144からインパネ取付孔111a、111b及び基準ターゲット77の位置を、位置データ142における基準位置データと比較し、その比較結果に基づいて、基準ターゲット77が許容ずれ範囲となるようにインパネ支持アーム72を駆動する。
(もっと読む)
医療用ロボットシステム
【課題】本発明は、支持する器官の形状の個人差等に対応することができ、しかも部品点数の増加を抑えることができる医療用マニピュレータを備えた医療用ロボットシステムを提供する。
【解決手段】ロボットアーム24と、ロボットアーム24に着脱自在に設けられ、子宮Aを所定の位置に支持するための子宮マニピュレータ34と、ロボットアーム24及び子宮マニピュレータ34を操作するコンソール26と、を備えた医療用ロボットシステム10であって、子宮マニピュレータ34は、基部58に設けられた第1アーム部60と、第1アーム部60よりも先端側に位置して子宮Aを保持する第2アーム部64と、第1アーム部60と第2アーム部64とを連結し、かつ第1アーム部60に対する第2アーム部64の向きを可変可能な連結部68とを備え、第2アーム部64は、長手方向に伸縮可能に形成されている。
(もっと読む)
物品搬送ロボットシステム
【課題】コンベア等の搬送手段上を流れる収納容器内にロボットを用いて効率的に物品を収納することができる物品搬送ロボットシステムを提供する。
【解決手段】容器検出部45は、収納容器20の検出結果に基づいて各収納セルの濃淡分布を計測して、各収納セルの収納状態を検出し、該検出結果を、収納セル毎に対応づけて記憶する。制御装置13の情報管理部41は、制御装置15の容器検出部45から情報を受け取ると、収納セル情報を生成する。情報選択部42が、次に処理する収納セル情報を確認し、これに物品が収納されていない場合にのみ、物品を収納するために収納セル情報を作業実行部43に転送する。作業実行部43は、収納セル情報をもとに物品を選択された収納セルに収納するようにロボット12を制御する。
(もっと読む)
自動作業システムにおける位置ズレ補正方法及び位置ズレ補正プログラム
【課題】位置決めロボットと作業ロボットとの協調作業の際に生じ得る位置ズレを検出して補正する。
【解決手段】アームの先端部位に保持ツール105及び慣性センサ106を具備する位置決めロボット100と、アームの先端部位に作業ツール205を具備する作業ロボット200と、ロボット制御装置300と、を有した自動作業システムにおいて、位置決めロボット100によりワークを保持した保持ツール105をワークの作業位置に応じた保持ツール105の位置決め基準位置P0に搬送して位置決めするとともに、作業ロボット200により当該ワークに対し所定の作業を行う際、ロボット制御装置300は、慣性センサ106の慣性力に基づいて保持ツール105の位置決め基準位置P0からの位置ズレ量ΔP1を検出し、検出した位置ズレ量ΔP1に基づいて保持ツール105の位置決め基準位置を位置ズレ前の位置P0に補正する。
(もっと読む)
41 - 60 / 267
[ Back to top ]