
Fターム[3C007JT07]の内容
マニピュレータ、ロボット (46,145) | 操縦桿 (385) | 従部と電気的に接続されているもの (361) | 他に設定機能を有するもの (30)
Fターム[3C007JT07]に分類される特許
1 - 20 / 30
マスタスレーブマニピュレータ及び医療用マスタスレーブマニピュレータ
【課題】冗長関節を有するマスタスレーブマニピュレータであっても逆運動学計算にかかる負荷を低減可能なマスタスレーブマニピュレータを提供すること。
【解決手段】マスタ操作入力装置10の操作部11に、スレーブアーム31の冗長関節の駆動量を操作者が指令するための操作部材としての第1ロール関節102を設ける。スレーブアーム31が冗長関節を有していない場合には、スレーブアーム31の全体としての逆運動学を解くことによって各関節の駆動量を求める。また、スレーブアーム31が冗長関節を有している場合には、先端の冗長関節202がないものとして逆運動学を解くことによって冗長関節202以外の関節の駆動量を求める。冗長関節202についてはマスタ操作入力装置10からの指令値に対応した駆動量とする。
(もっと読む)
マスタ・スレーブ型ロボット操作システム

【課題】安価で操作性に優れたマスタ・スレーブ型ロボット操作システムを提供する。
【解決手段】マスタ・スレーブ型ロボット操作システムは、操作者によって操作されるマスタ操作装置10と、遠隔操作されるスレーブロボット装置と、マスタ操作装置とスレーブロボット装置との間で両装置の状態情報を双方向通信する情報通信手段30とを備える。スレーブロボット装置は、任意の姿勢又は動作を実現するために複数のアクチュエータを備えている。マスタ操作装置10は、スレーブロボット装置が備える構造に対応する構造を備えることでスレーブロボット装置が取り得る任意の姿勢又は動作と同様の姿勢又は動作を実現可能であり、且つ、スレーブロボット装置に設置された複数のアクチュエータに対応した複数のアクチュエータ13a〜13hを備えている。
(もっと読む)
マスタ・スレーブ方式マニピュレータの制御装置及びその制御方法
【課題】マスタマニピュレータの操作対象のスレーブマニピュレータを、切替操作により他のスレーブマニピュレータに切り替えた場合に、当該マスタマニピュレータの姿勢を、新たな操作対象のスレーブマニピュレータの姿勢に合わせる処理を効率的に行うマスタ・スレーブ方式マニピュレータの制御装置及び制御方法を提供すること。
【解決手段】マスタ・スレーブ方式マニピュレータの制御装置を次のように構成する。マスタマニピュレータに操作者3の手が位置しているか否かを検出する接触センサ311R,311Lと、接触センサ331R,331Lによって、マスタマニピュレータに操作者3の手が位置していないことが検出された場合に、マスタマニピュレータの姿勢を、スレーブマニピュレータの姿勢に合わせるように、マスタマニピュレータを移動させる制御を行うマスタ制御回路300と、を具備させる。
(もっと読む)
ロボットの操作方法及びロボット操作用デバイス
【課題】ワークをツールでグリップしたロボットを、操作者がワークを直接動かすのと同じ感覚で操作すること。
【解決手段】ロボットのグリッパ17でグリップしたワーク21の対向する2面に、着脱ユニット63の吸着盤63aを用いてロボット操作用デバイス60のベース61をそれぞれ固着する。ベース61に力覚センサ65を介して取り付けられた各ロボット操作用デバイス60の操作ハンドル67を両手で把持した操作者が、ワーク21を動かす操作力を各操作ハンドル67にそれぞれ加える。各操作力を方向別に力覚センサ65で検出してその検出信号をロボットの制御装置に出力し、制御装置は検出信号に基づいてロボットを動作させる。
(もっと読む)
ロボット制御装置
【課題】操作者の操作によりワークを所望の姿勢や位置に移動させ易くすること。
【解決手段】操作レバーの操作によりロボット装置のツールセンターポイントを旋回させる際の回転中心となる回転軸を、回転軸切換スイッチのオンオフ状態の切り換えによって、ワーク101の中央に設定された第1の回転軸θ1と、ワーク101の右上の取付孔101dに設定された第2の回転軸θ2との間で切り換える。ワーク101の取付孔101dがボード201の取付ピン201dに対向する位置にワーク101を移動させた状態で、回転軸切換スイッチ11をオフからオンに切り換え、操作レバー8を右方向に傾動させてワーク101をボード201に対して右回転させると、ワーク101の取付孔101dがボード201の取付ピン201dに対向する位置を保ったまま、ワーク101の他の取付孔101a〜101cが対応するボード201の取付ピン201a〜201cに近づく。
(もっと読む)
マニピュレータ
【課題】開閉するエンドエフェクタを機械的に駆動操作する操作部における操作性を向上させる。
【解決手段】マニピュレータ10は、グリッパ軸入力部104を含む操作部14bと、エンドエフェクタ1300の向きを変える1以上の姿勢軸を含む先端動作部12と、操作部14bと先端動作部12を連結する連結シャフト18と、姿勢軸を駆動するモータ60、62と、グリッパ軸入力部104の人手による操作を機械的に伝達して、エンドエフェクタ1300を駆動するエンドエフェクタ駆動機構1320aとを有する。グリッパ軸入力部104は、開閉軸106を基準にして開閉する第1指掛部108及び第2指掛部110を備える。第1指掛部108は固定され、第2指掛部110が第1指掛部108に対して相対的に開閉動作し、第1指掛部108と第2指掛部110が閉じることによってエンドエフェクタ1300が閉じる。
(もっと読む)
マニピュレータ装置
【課題】オペレータがマニピュレータ装置のアームユニットの位置を的確に認識することができ、操作を容易にすることができる。
【解決手段】マニピュレータ装置が、ハンド側旋回動作軸を回転中心として旋回可能に腕部の他端に連結されたハンド部を備えるアームユニットと、使用者の手により操作される操作部と、ハンド側旋回動作軸と同じ方向に配置された操作側旋回動作軸を回転中心として操作部を旋回可能に腕部に連結する連結部と、操作部と連結部との間に介在して配置され、操作側旋回動作軸回りに作用する回転力を検出する力検出用センサとを備える操作ユニットと、力検出用センサにより検出された回転力の大きさに応じてハンド部を旋回させる駆動装置と、駆動装置によりハンド部に付与される駆動力を操作部に伝達し、ハンド部の回動角度に応じて、操作部を旋回させる連動機構とを備える。
(もっと読む)
マニピュレータ装置
【課題】オペレータがマニピュレータ装置のアームユニットの位置を的確に認識することができ、操作を容易にすることができる。
【解決手段】マニピュレータ装置が、ハンド側旋回動作軸を回転中心として旋回可能に腕部の他端に連結されたハンド部を備えるアームユニットと、使用者の手により操作される操作部と、操作部を腕部に連結する連結部と、操作部と連結部との間に介在して配置され、ハンド側旋回動作軸と同じ方向に配置された操作側旋回動作軸回りに作用する回転力を検出する力検出用センサとを備える操作ユニットと、力検出用センサにより検出された回転力の大きさに応じてハンド部を旋回させる駆動装置とを備える。
(もっと読む)
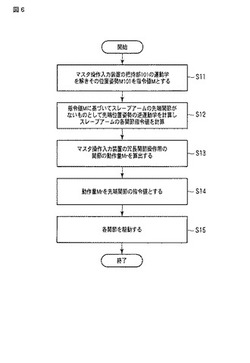
マニピュレータの操作評価装置及びこれを備えたパワーアシスト装置
【課題】マニピュレータの操作性を客観的に評価することのできる操作評価装置と、これを備えたパワーアシスト装置を提供する。
【解決手段】操作者により操作される操作部1、2と、該操作部1、2の操作入力に基づいて複数の動作を行う動作部11とを備えたマニピュレータに於いて、前記操作部1、2によるマニピュレータの操作性を評価するための操作評価装置であって、前記動作部11を基準位置から目標位置にまで到達させる一の動作を行わせるために要した操作部1、2の操作時間と、前記動作部11が到達した位置と目標位置との差と、前記操作部1、2の操作入力に、前記動作部11に他の動作を行わせるための操作入力が付加された場合に於いて該付加された操作入力量とを評価要素としてマニピュレータの操作性を評価する評価手段を備えている。
(もっと読む)
作業ロボットと、ティーチング方法
【課題】作業ロボットを設置する作業の効率の低下を抑制し、効率よくティーチングできる、作業ロボット及びティーチング方法を提供することを課題とする。
【解決手段】ロボットアーム10に装着される溶接機20aを、ワークWkに対して作業可能な位置に配置したときの溶接トーチ24のヘッド位置情報をコントローラ30に教示する。そして、コントローラ30は、教示されたヘッド位置情報を、ワークWkの作業部位を示す作業位置情報として、ティーチングデータを作成することを特徴とする作業ロボットとした。
(もっと読む)
案内面指示装置及び作業補助アーム
【課題】簡易な構成で実現することができ、かつアームを動作させる案内面を簡単な操作で指示することが可能な案内面指示装置及びこれを用いた作業補助アームを提供する。
【解決手段】水平軸及び鉛直軸周りに回動自在にアーム手先13に取り付けられた操作桿16と、操作桿16の水平軸及び鉛直軸周りの回転角度を検出する角度検出器22a,22bと、角度検出器22a,22bにて検出された回転角度を用いて、操作桿16を含む案内面を規定する案内面情報を算出し、制御装置33に設定する案内面演算部36とを備えた。
(もっと読む)
マニプレータシステム
【課題】マスタースレーブ方式のマニプレータにおいて、作業者の労力を軽減する。
【解決手段】マスターアーム10と、マスターアーム10の動作に追従するスレーブアーム30とを備えたマニプレータシステム1であって、マスターアーム10は、自由度7以下の腕部11、ハンド部20及び先端の位置が検出可能な自由度8以上の紐状センサ17を有する。作業者Pがマスターアーム10に動作を入力する動作入力部は、マスターアーム10のハンド部20に設けられている。
(もっと読む)
マニプレータシステム
【課題】マスタースレーブ方式のマニプレータにおいて、作業者の労力を軽減する。
【解決手段】マスターアーム10と、マスターアーム10の動作に追従するスレーブアーム30とを備えたマニプレータシステム1であって、マスターアーム10は、自由度7以下の腕部11、ハンド部20及び先端の位置が検出可能な自由度8以上の紐状センサ17を有し、作業者Pがマスターアーム10に動作を入力する動作入力部が、マスターアームのハンド部20に設けられ、紐状センサ17の一端175が作業者Pの頭、首、または体幹に装着され、他端176がマスターアーム30の腕部11の先端部若しくはハンド部20、又は作業者Pの手、手首部若しくは前腕部に取り付けられている。
(もっと読む)
操作機構及び該操作機構を備えるマニピュレータ
【課題】入力部を基準位置へと確実に復帰させることができ、操作性を一層向上させることができる操作機構及び該操作機構を備えるマニピュレータを提供する。
【解決手段】マニピュレータ10は、操作指令部14と、操作指令部14から延在する連結シャフト48と、連結シャフト48の先端に設けられ、操作指令部14の操作に基づいて、先端部の延在方向の軸線を中心として回動可能な回転機構を備える作業部16とを備える。操作指令部14は、人手によって把持されるグリップハンドル26と、指で所定の二方向に移動させることで入力操作を行う複合入力部34とを備え、複合入力部34は、ベース体102と、ベース体102に対して回転自在に係合されるシャトルリング100と、シャトルリング100を基準位置の方向へと付勢する一対のばね124a、124bと、ばね124a、124bの溝部125外への伸長を阻止する阻止部材131とを有する。
(もっと読む)
パワーアシスト装置及びその制御方法
【課題】急停止・急発進に伴うワークの揺れによってワークと相手ワークとが接触することを防止できるパワーアシスト装置及びその制御方法を提供する。
【解決手段】操作ハンドル6と、力センサ7と、ウィンドウ2を保持するロボットアーム3と、ロボットアーム3を駆動するアクチュエータ11と、ロボットアーム3を搬送する搬送手段14と、を備え、搬送手段14を組立ライン上を移動しているボディ100と同期して移動させて、ウィンドウ2をボディ100に組付けるパワーアシスト装置50の制御方法であって、ボディ100の動作状態が、移動状態を継続している通常時には、搬送手段14がボディと同期して移動するように制御し、ボディ100の動作状態が、移動状態から停止状態もしくは停止状態から移動状態へと変化した場合には、ロボットアーム3の駆動を、所定時間の間停止させ、所定時間が経過後、ロボットアーム3の駆動を再開する。
(もっと読む)
マニピュレータ、マニピュレータの駆動方法、マニピュレータシステム及び微小操作対象物の操作方法
【課題】容易な位置決めとインジェクションとを同時に満たすことができるマニピュレータを提供する。
【解決手段】このマニピュレータ1は、操作試料に対してインジェクションを行なうものであって、XYZ軸方向に駆動可能であり、少なくともインジェクションを行なう軸方向の圧電素子6を駆動源とするナノポジショナ7と、圧電素子に対して信号を印加することにより圧電素子を微動動作させる制御部10aと、を有する。
(もっと読む)
ロボット制御システム
【解決手段】 制御装置5のプログラム記憶部5Dには、ロボットハンド3Aを正確に水平にさせるための姿勢制御プログラムが予め記憶されている。
まず、操作者は、操作手段2を介しての遠隔操作によりロボットハンド3Aの把持部3Bを容器Bに接近させる。次に、その状態において、操作者が操作手段2のプログラム実行スイッチ2Bを押すと、上記姿勢制御プログラムが実行される。つまり、作動制御部5Bにより、ロボットハンド3Aの姿勢が正確に水平となる。
【効果】 操作者の作業負担を軽減させることができる。
(もっと読む)
マニピュレータ、マニピュレータシステム、マニピュレータ用画像表示装置及びマニピュレーションシステム
【課題】細胞等の微小微小対象物に対しキャピラリによるインジェクション操作を行う際に、かかる操作のための動作を確実に精度よく繰り返して行うことが可能なマニピュレータ及びマニピュレータシステムを提供する。
【解決手段】このマニピュレータは、ナノポジショナの構造を有し、キャピラリの微動動作を行うことで微小対象物に対するインジェクションが可能であって、キャピラリの動作を制御する制御部43と、制御部に対しキャピラリの動作を指示するために操作者により操作される操作部47,49と、を備え、操作部が、その指示の少なくとも一部を押されることで実行するボタン操作部47a,47bを有し、ボタン操作部を押すことで、キャピラリによるインジェクション操作の少なくとも一部の動作が行われる。
(もっと読む)
マニプレータシステム
【課題】マスタースレーブ方式のマニプレータにおいて、簡便な手法で作業者とマスターアームの干渉を無くし、作業者の動作範囲を広く確保する。
【解決手段】腕部11及びハンド部20を有するマスターアーム10と、マスターアーム10の動作に追従するスレーブアーム30とを備えたマニプレータシステム1であって、作業者Pがマスターアーム10に動作を入力する動作入力部が、マスターアーム10のハンド部20に設けられ、マニプレータシステム躯体へのマスターアーム10の取付部が、ハンド部20を挟んで、作業者Pの操作位置A1に対向するように設けられている。
(もっと読む)
ロボットの教示システム
【課題】 多関節型ロボットの教示を、低コストな手段でより簡単に行うことができる教示システムを提供する。
【解決手段】 ロボット2が有するアーム7〜12に夫々対応する教示用のアーム15〜20を有する操作部3を備え、作業者が、教示用アームの先端を変位させてロボット2に対する教示作業を行なう。その際、操作部3のアーム15〜20の変位量に応じてロボット2のアーム7〜12が連動し、アーム20先端の操作盤28にある液晶パネルにはアーム12先端のビデオカメラ13で撮像された画像が表示される。作業者が教示用アーム15〜20を変位させると、各関節J1〜J6のエンコーダ及びヨーレートセンサが夫々の変位量に応じた検出信号を出力し、パソコン4が座標変換処理を行ない教示用データを生成する。
(もっと読む)
1 - 20 / 30
[ Back to top ]