
Fターム[3C007KS31]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | 接触 (238)
Fターム[3C007KS31]に分類される特許
221 - 238 / 238
動作生成システム
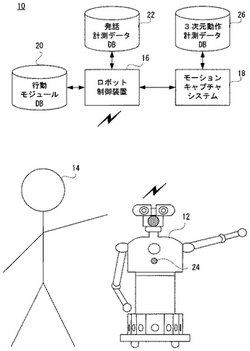
【構成】動作生成システム10は身体表現可能なコミュニケーションロボット12を含み、ロボット制御装置16は、モーションキャプチャシステム18によって計測した人間14とコミュニケーションロボット12の身体動作データおよびマイク24から取得した発話計測データに基づいて、人間14の動作の状態を検出する。そして、人間14の動作に協力的な動作(模倣動作および同調動作)を実現するための複数の行動モジュールが記憶された行動モジュールDB20から、検出された状態に応じた行動モジュールを選択する。行動モジュールの実行によって当該協力的な動作を実現するための制御データが生成され、コミュニケーションロボット12では制御データに基づいて当該協力的な動作が実現される。
【効果】相手の状態に応じて適切な模倣動作や同調動作のような協力的動作をコミュニケーションロボットに実行させることができる。
(もっと読む)
自走式作業ロボット

【課題】 いずれの方向から障害物に接触した場合にも適切、かつ、迅速に対応可能な自走式作業ロボットを提供する。
【解決手段】 床面を自走する走行アセンブリ1と、床に対する作業を行う作業アセンブリ2とを備えた自走式作業ロボットに関する。前記作業アセンブリ2の前面に障害物が接触したのを検知する第1の接触センサと、作業アセンブリ2の側面に障害物が接触したのを検知する第2の接触センサを設け、第1の接触センサの検知信号に基づいて、第1の退避速度で作業アセンブリ2を左右に移動させ、第2の接触センサの検知信号に基づいて第1の退避速度よりも低速の第2の退避速度で作業アセンブリ2を左右に移動させる。
(もっと読む)
対話型ペットロボット
【課題】発話フレーズ数や待受けフレーズ数の制約があっても、会話を促進可能な新規な対話型ペットロボットを提供する。
【解決手段】対話型ペットロボットは、記憶部より読み出されたプログラムの記述にしたがった処理を行う制御部9とを有する。プログラムは、ユーザとの会話の進行手順を分岐付で規定しており、ある質問の内容と、質問に対する返答となる複数の選択肢と、選択肢のそれぞれに対するアクションとが対応付けて記述されている。質問の内容が音声出力された場合、質問に対する返答の候補として、質問に対応付けられた複数の選択肢をディスプレイ3に表示させる。ディスプレイ3に表示された複数の選択肢のうちのいずれかがユーザによって全文が発話された場合、音声認識を行って、ユーザの発話に対応する一の選択肢を特定するとともに、この一の選択肢に対応するアクションを、返答に対して対話型ペットロボットが次にとるべき反応として決定する。
(もっと読む)
センサモジュールおよびこれを用いたロボットハンド
【課題】異なる圧力の作用状態を検出する3種類の感圧センサを所望する位置に円滑に混在させて配置することができるセンサモジュールおよびこれを用いたロボットハンドを提供する。
【解決手段】圧力の作用により抵抗値が個々に減少するように抵抗変化率を異ならせた3数種の感圧ゴム11a〜11cによって電極22を被覆してなる複数の感圧センサ13a〜13cと、これらの感圧センサにより検出された電極に対する抵抗値に基づいて圧力の作用状態を判断するCPUと、このCPUの判断情報を外部に通信によって伝達する接続端子とを備え、上記複数の感圧センサの電極、CPUおよび接続端子を電気的に接続してモジュール化している。
(もっと読む)
移動ロボットの制御装置
【課題】不特定多数の人間が移動する環境下でも、移動する人間と衝突せずに円滑に移動することのできる移動ロボットの制御装置を提供する。
【解決手段】環境情報取得手段(ビデオカメラ3やマイクロフォン4)と、現在位置検出手段(15)と、移動領域内の通路や固定物の配置に関わる情報を記述した地図管理手段(7)とを備え、移動領域内の環境情報を参照しつつ自律的に移動するロボット(1)の制御装置において、環境情報取得手段が認識した対向者と自身との位置関係に基づいてそのままの進路をとると対向者との衝突可能性大と判断された場合は、合図(方向指示灯16)を発して進路を右側へ変更し、且つその衝突回避行動が対向者に伝わったことを確認するものとする。
(もっと読む)
ロボット
本発明は、例えば家の中など障害物がある環境で自由に動き回わるのに適した構造を有するロボットを提供することを目的とし、カメラで得られた画像を基地局に無線で送信することにより、その画像を、基地局を介して、その基地局との間で無線通信を行なう通信端末に送信するとともに、その通信端末の操作によりその画像上に指定された移動目標位置情報を基地局を介して無線で受信する通信部と、その通信部で得られた移動目標位置情報により特定される移動目標位置までロボットを移動させる動作制御部とを備えた。  (もっと読む)
(もっと読む)
ロボット
【課題】 人の生体情報を検出できる機能を備えることにより、医療関係ロボット、アミューズメントロボット、産業用ロボット等としてより高機能のロボットを提供する。
【解決手段】 ロボットの指の部分に生体情報をセンシングできるセンサ部1を設けている。このセンサ部1は、人の脈拍や血圧等を測るための脈波センサである発光装置11及び受光装置12と、人体のインピーダンスを測定するための電流印加用電極15及び電圧検知用電極16とからなる。そして、受光装置12からの脈波信号や電流印加用電極15及び電圧検知用電極16により測定された人体のインピーダンス値に基づいて、心電、血圧、脈拍、脈波、体温、呼吸、体脂肪、骨密度、脳波、血中酸素濃度、血糖値等の生体情報を演算等により求める。
(もっと読む)
自律走行移動体
【課題】 走行空間内の壁際や隅についても探索走行ができ、自律走行移動体を用いて作業を行うことができるとともに、走行空間内を探索移動するために必要な検知手段や検出手段の数をできるだけ減らし、小型化することが可能な自律走行移動体を提供することである。
【解決手段】 自律走行移動体1は、移動体本体10と、移動体本体10を走行させる駆動輪12と駆動モータ14と、駆動モータ14を制御する制御部20と、移動体本体10を走行させるための走行情報が入力され、かつ、入力された走行情報に基づいて駆動モータ14を制御するための制御情報を制御部20に与える操作ユニット50とを備える。
(もっと読む)
触覚センサを有するロボットの教育
【課題】作業環境内で正確に仕事を行うために、ロボットを教育および/または較正するために有益な方法および装置を提供する。
【解決手段】本発明は、ロボット12に連結して作動し、ロボット12の作業環境内の1つ以上の所望位置に位置付けられる1つ以上の触覚センサデバイス38を備える。本発明の1つの構成によれば、作業環境内にタッチ感応面(タッチ感応ゾーン)を設け、このタッチ感応面を対象物に接触させ、前記タッチ感応面に対する接触位置を示す信号を発生させ、発生した前記信号を含む情報を用いて、前記作業環境内の接触位置をロボット12に教える、各工程を含むことを特徴とする。  (もっと読む)
(もっと読む)
ロボットの接触力検出装置
【課題】 簡単かつ信頼性の高い構成で、アームの任意の箇所に加えられた接触力を検出可能な、ロボットアームの接触力検出装置を提供する。
【解決手段】 ロボット本体1においては、ロボットアーム101の根元部のロボットベース102に力検出器103を設けて、ロボットアーム101に加わる力を検出する。制御装置2においては、接触力算出部250を設けて、ロボットアーム101に加わる力からロボットアーム101自身の動作による内力を差し引くことにより、ロボットアーム101に作用する接触力を算出し、また関節回避量算出部220を設けることにより、前記接触力を用いて接触力回避動作を算出し、さらに動作制御部230およびモータ制御部240を設けることにより、ロボットアーム101の接触力回避動作を実行させる。これにより、ロボット本体1の安全な動作を達成する。
(もっと読む)
人間型ロボットの制御装置
【課題】 物体を押しながら安定して歩容することができる人間型ロボットの制御装置を提供する。
【解決手段】 床に置かれた対象物を継続的に押す人間型ロボットの制御装置において、両脚が地面に着いた両脚支持期に対象物を押し、片脚のみが地面についた片脚支持期では対象物を押さない制御を行う制御手段を備える。また、床に置かれた対象物を継続的に押す人間型ロボットの制御装置において、両足が地面に着いた両脚支持期に手先反力を制御することにより対象物を押し、片足のみが地面に着いた片脚支持期では対象物を押すことなく、先に対象物を押した量だけステップする制御を行う。
(もっと読む)
ロボット環境間力作用状態呈示装置
【課題】 拘束状態におけるスレーブロボットと環境との間の力の作用状態を推定かつ表示する。
【解決手段】 予測モデルによりスレーブロボットの予測された運動予測画像と、モニタ用カメラにより、ロボットにより力が作用される環境が撮影して得られた実画像とを重ねてモニタに表示する。スレーブロボット側から出力された、スレーブロボットの手先が環境から受ける力の絶対値が、所定の閾値以上か否かを判断し、所定の閾値以上と判断された場合には、スレーブロボットの手先は環境に拘束された拘束状態にあると判断して、予測運動画像内における、スレーブロボットの手先の環境内へのめり込み量を算出し、このめり込み量に基づいて、スレーブロボットの手先が環境に加える所定時間後の接触力及びモーメントを予測する。そして、予測された接触力及びモーメントに基づいて、予測力矢印FA及び予測モーメント矢印MAを、運動予測画像に代えて、実画像に重ねてモニタで、呈示する。
(もっと読む)
食事支援装置
【課題】食物の盛り付け方や照明等の環境条件の変動によらず、利用者の食事が円滑に進むことを支援する。
【解決手段】食物を把持する把持機構部36を備え、容器12を複数の領域に分割し、複数の領域の各々について食物の把持が有効となる可能性を示す有効値を算出し、有効性の予測値に基づいて複数の領域から決定した把持位置に対して把持を行うように把持機構部36を制御することで、容器12に盛り付けられた食物を把持して利用者の口元へ運んで利用者の食事を支援する食事支援装置により上記課題を解決できる。
(もっと読む)
電気的なスイッチ装置を備える過負荷防止装置
本発明は、つぎのような過負荷防止装置(1)に関している。この過負荷防止装置は、マニピュレータに設けられるように設計されているハウジング(2)と、このハウジングに可動状態で取り付けられかつツールが設けられるためのツールホルダ(3)と、上記ハウジングと上記ツールホルダとの間に予圧を発生するための予圧装置(4)とを備えている。この場合、上記予圧装置は、媒体を介して作用する圧力ピストンを持つピストンユニットとして構成され、また、上記ハウジングと上記ツールホルダとの間の相対的運動によってスイッチングを行うスイッチ装置(5)を備えている。本発明は、上記スイッチ装置が、少なくとも1つの導電性スイッチ面(6)と、このスイッチ面と電気的に接触することができる少なくとも1つの導電性接点エレメント(7)とを備えていることを特徴としている。この場合、上記スイッチ面(6)と上記接点エレメント(7)とは、上記ツールホルダと上記ハウジングとの互いに対向する表面部分(8)に設けられている。そして、この場合、上記接点エレメント(7)は、上記スイッチ面(6)に対して上記圧力ピストンの少なくとも部分をシールするシールエレメントとして構成されている。  (もっと読む)
(もっと読む)
光学式触覚センサ、光学式触覚センサを利用したセンシング方法、センシングシステム、物体操作力制御方法、物体操作力制御装置、物体把持力制御装置及びロボットハンド
【課題】 製作が容易であり、小型化も容易な光学式触覚センサを提供する。また、1種類のセンサによって複数種類の力学量を同時に測定することが可能な光学式触覚センサを利用したセンシング方法、センシングシステム、物体操作力制御方法、物体操作力制御装置、物体把持力制御装置及びロボットハンドを提供する。
【解決手段】 光学式触覚センサ11は、タッチパッド12と、タッチパッド12の挙動を撮影するCCDカメラ13を備える。CPU23は、CCDカメラ13からの画像情報を画像処理し、接触領域A1の大きさ、形状及び重心に関する情報を抽出し、固着領域A2の大きさに関する情報を抽出する。CPU23は、接触領域A1の大きさから法線力を求め、接触領域A1の形状及び接触領域A1の重心から接線力を求め、接触領域A1の大きさに対する固着領域A2の大きさの割合から摩擦係数を求める。
(もっと読む)
伸縮式の手のひらを有するロボットハンド
【解決手段】ロボットハンドは、指と手のひらとを有する基部を備える。指は可動範囲を定める。ハンドは、手のひらから指の可動範囲までの距離を変化させることによって、指と手のひらとの間で物体を把握することができる。この距離を変化させることは、手のひらを指の可動範囲に向かって動かすか、指の可動範囲を手のひらに向かって動かすことによって達成可能である。手のひらを動かすロボットハンドは、手のひらを基部から指の可動範囲に向かって伸ばすアクチュエータを備える。手のひらに対して指の可動範囲を動かすロボットハンドは、基部に対して平行移動するように構成された共通指支持部に指が取り付けられている。 (もっと読む)
光学式触覚センサ及び該センサを用いた力ベクトル分布再構成法
【課題】
自由曲面からなる触覚部を備えた光学式触覚センサを提供する。
【解決手段】
触覚部と撮影手段とを備えた光学式触覚センサであって、該触覚部は透明弾性体1と該弾性体内に設けた複数のマーカー群とから構成されている。各マーカー群はそれぞれ多数の有色マーカーから構成されており、異なるマーカー群を構成するマーカーは群毎で互いに異なる色を有しており、該弾性体の表面2は自由曲面であり、該マーカー群は該自由曲面に沿って配設されている。該弾性体に物体が接触した際の該有色マーカーの振る舞いを該撮影手段で撮影する。触覚センサは、好ましい例では、指型触覚センサである。
(もっと読む)
ロボット装置及びその制御方法
【課題】マイク、カメラや種々のセンサで検出することが困難であった外部に存在する対象の情報の正確な確認や識別を可能とするロボット装置を提供する。
【解決手段】自律的に行動を出現させると共に、外部からの入力情報に応じて行動が制御されるロボット装置は、外部に存在する対象に設けられた無線タグ、いわゆるRFID(Radio Frequency Identification)タグから、該RFIDタグに記憶されているデータを読み取る無線タグ読取手段であるRFIDリーダ部19と、RFIDリーダ部19により読み取られたデータに応じた上記対象に関連する情報である対象関連情報に対応する状態認識情報に基づいて行動を制御するコントローラ10とを有する。
(もっと読む)
221 - 238 / 238
[ Back to top ]