
Fターム[3C007KS31]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | 接触 (238)
Fターム[3C007KS31]に分類される特許
21 - 40 / 238
ロボット及びその制御方法
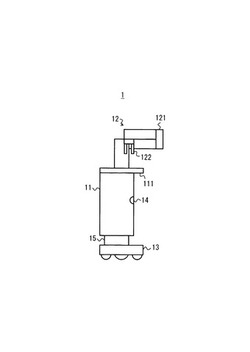
【課題】簡易な構成により作業時の安定性を確保できるロボット及びその制御方法を提供すること。
【解決手段】本発明にかかるロボット1は、ロボット本体11、アーム12、台車13、センサ14を備える。アーム12は、ロボット本体11に連結され、関節機構及び伸縮機構のうち少なくともいずれか一方を有する。センサ14は、ロボット本体11の周囲に存在する物体を検知する。ロボット1は、アーム12が稼働する場合、台車13によりセンサ14が検知した物体に接近し、ロボット本体11の一部を当該物体に当接させる。
(もっと読む)
把持搬送装置

【課題】接触センサ自体が、周囲の物体との干渉要因になり難いようにするとともに、複数の把持爪で対象物を把持する時に、当該対象物もしくはこれの周囲にある物体と当該把持爪との接触を検出できるようにする。
【解決手段】対象物を把持する複数の把持爪3と、把持爪3を動作可能に保持して移動する保持移動体5と、物体との接触を検出する接触センサ7とを備える。接触センサ7は、その一部が把持爪3の内部に配置されるように把持爪3の先端部に組み込まれている。
(もっと読む)
産業用ロボット
【課題】ハンドの先端と周辺機器とが衝突したときの衝撃が大きい場合であっても、ハンドの損傷を軽減することが可能な産業用ロボットを提供する。
【解決手段】搬送対象物2を搬送する産業用ロボット1は、搬送対象物2が搭載されるハンド3と、産業用ロボット1の周辺機器にハンド3の先端が衝突したことを検知するための検知機構とを備えるとともに、ハンド3が所定方向を向いた状態で略直線状に移動するように構成されている。ハンド3は、ハンド3の先端部分を構成するとともに周辺機器にハンド3の先端が衝突したときにハンド3の基端側に向かって移動可能な衝撃吸収部材20を備えている。
(もっと読む)
把持搬送装置および把持搬送方法
【課題】把持機構を支持する支持移動体と障害物の衝突を検知できるとともに、衝突時のオーバートラベル量による支持移動体の損傷を防止できる把持搬送装置を提供する。
【解決手段】支持移動体5の外面に取り付けられる衝撃吸収センサ9を備える。衝撃吸収センサ9は、弾性体と、該弾性体に組み込まれた衝突検出部と、を有する。衝突検出部は、該弾性体の弾性変形により衝突信号を出力する。衝突信号を受けることで、前記支持移動体5の移動を停止させる制御を行う制御装置11をさらに備える。支持移動体5が設定速度で移動している時に衝突信号が出力されてから、支持移動体5が停止するまでに支持移動体5が移動する距離をオーバートラベル量として、弾性体の最大弾性変形量は、オーバートラベル量以上である。
(もっと読む)
ロボットシステム
【課題】板厚が未知の場合であってもワークの撓みを抑えた状態でスポット溶接ロボットの溶接点教示位置を自動で修正し、溶接品質を向上させる。
【解決手段】ロボット1に溶接点位置を教示するに際し、可動電極21と固定電極22とによって溶接点を挟む位置にスポット溶接ガン2を移動させる第1の処理と、モータ駆動により可動電極21を被溶接部材Wに向けて伸ばし、モータへのトルク指令に基づいて可動電極21と被溶接部材Wとの接触を検出し、接触検出後に可動電極21の動作を停止させる第2の処理と、モータ駆動により可動電極21が被溶接部材Wと接触した状態を保ちながら、ロボット1を可動電極21側へ動作させて固定電極22を被溶接部材Wに接近させ、ロボット1の関節に作用する外乱トルクによって固定電極223被溶接部材Wとの接触を検出し、接触検出後にロボット1の動作を停止させる第3の処理 とを含む。
(もっと読む)
ロボット装置およびロボット装置による把持方法
【課題】対象物の位置情報に誤差が含まれる場合にも、確実に対象物を把持することが可能なロボット装置を提供する。
【解決手段】このロボット装置100は、ロボットアーム10と、ロボットアーム10の先端に設けられ、力制御を行うための力センサ21a、22aおよび23aを有する多指ハンド部20と、視覚センサ30による検出により、把持対象物110の少なくとも位置情報を取得する画像処理部43と、画像処理部43により取得した把持対象物110の少なくとも位置情報に基づいてロボットアーム10を移動させて把持対象物110に多指ハンド部20を近づけていき、多指ハンド部20の力センサ21a、22aおよび23aの出力に基づいて把持対象物110に対する実際の接触位置を検出し、検出した接触位置の情報に基づいて把持対象物110の位置情報を修正する制御装置40とを備える。
(もっと読む)
ロボットの接触種類判別システム
【課題】簡単な構成で接触の種類を判別することができるロボットの接触種類判別システムを提供する。
【解決手段】本発明に係るロボットの接触種類判別システム100は、ロボット1への接触によって外力が作用する際に、接触の種類を判別する接触種類判別システムである。接触種類判別システム100は、ロボット1に搭載された、外力の力学特性を示す3軸方向以上の成分を検出する第1の検出部110と、第1の検出部110の検出結果に基づいて特徴量を算出する特徴量算出部152と、特徴量と予め接触の種類に対応するように取得したサンプル特徴量とをパターンマッチングし、ロボット1への接触の種類を判別する接触種類判別部153と、を備える。
(もっと読む)
接触検出装置および接触検出装置を適用したロボットシステム
【課題】ノイズに強く、アプリケーションに応じて接触検出器の数の増減が容易で、接触位置も特定可能な接触検出装置を提供する。
【解決手段】 2接点スイッチと抵抗値のそれぞれ異なる抵抗器から構成される複数の接触検出器を、リファレンス電源線、アース線および信号線からなる接続ケーブルで信号処理部に接続する。信号線には接触有無と接触時のその位置を表す信号が検出され、この信号から信号処理部で接触状態と接触位置を判別し検出する。また、この接触検出装置をロボットの腕、胴、頭など各部位に装着しその接触状態を検出する。
(もっと読む)
静電容量型センサおよびセンサ取付構造
【課題】柔軟で、荷重の測定レンジが広い静電容量型センサを提供することを課題とする。
【解決手段】静電容量型センサ5は、エラストマー製であって、積層方向のばね定数が異なる複数の誘電層500、501が積層されてなる誘電体50と、誘電体50の表側に配置され、エラストマーと、エラストマーに充填される導電性フィラーと、を有する表側電極01X〜12Xと、誘電体50の裏側に配置され、エラストマーと、エラストマーに充填される導電性フィラーと、を有する裏側電極01Y〜12Yと、を備える。
(もっと読む)
ロボットの教示手順校正装置および方法
【課題】ロボットの特徴である高速性を失わずに作業対象物に接触するとともに接触位置検出し、エンコーダ分解能程度のサブミリ単位の高精度検出することで、高速高精度なロボットの作業座標系のキャリブレーション(校正)方法を提供する。
【解決手段】弾性変形領域を持ったプローブを用いて、位置姿勢誤差発生前後において接触位置検出処理を所定回数繰り返すことで、ロボット座標に対する作業対象物の位置姿勢を算出し、位置姿勢誤差を計算し、位置誤差発生前の教示データを修正するという手順で処理する。
(もっと読む)
ロボットの作業成否判定装置、および方法
【課題】周辺環境の影響を受けず、作業の邪魔になり難く、ワークの個体差やラッチ有無の影響を受けずにロボットによる作業の成否を判定する作業成否判定装置及び方法を提供する。
【解決手段】作業成否判定装置は、ロボットによる作業対象物に対する所定の作業の実行後、ロボットの手先に取り付けられた弾性変形領域を持つ位置・姿勢検出手段が、作業対象物に関連する所定の位置に接触するよう、ロボットの手先を移動させる位置指令を生成する位置指令生成部と、手先に印加される外力の値と位置・姿勢検出手段の先端位置とから所定の位置に接触する際の位置・姿勢検出手段の先端位置(接触位置)を算出する接触位置検出部と、接触位置が所定の範囲内に収まる場合に所定の作業が成功したと判定し、そうでない場合に所定の作業が失敗したと判定する作業成否判定部とを備える。
(もっと読む)
ロボットキャリブレーション装置及びキャリブレーション方法
【課題】 ロボットキャリブレーションにおける精度を維持しつつ作業負荷を低減することを目的とする。
【解決手段】 ロボットの先端に弾性変形領域を持つプローブを取り付け、キャリブレーション用の定盤平面に垂直になる位置を教示することで、ロボットと定盤の位置関係をラフに教示し、さらにプローブ先端位置一定動作を生成し、位置検出動作指令を生成し、位置検出動作を実行し、プローブ先端位置一定動作時の精度(誤差)を計算し、測定したプローブ先端位置一定動作時の精度(誤差)と幾何学的パラメータ誤差からキャリブレーションを自動実行する。
(もっと読む)
ロボットの制御装置およびロボットを制御する方法
【課題】ロボットがラフな寄り付きでそのまま精密な作業をすることができるための作業教示データ修正方法、および装置を提供する。
【解決手段】ロボットが行うべき作業対象物に対する作業手順を記憶する作業手順記憶手段と、再生時のロボットと作業対象物との相対的位置及び相対的姿勢が、別の位置及び姿勢となったことを位置・姿勢検出手段によって検出したことに応じて、位置及び姿勢の変化量を獲得し、算出値に基づいて作業手順を修正する作業手順修正手段とを備え、修正される作業手順が、接触状態検出手段によって検出された作業対象物の位置及び姿勢をもとに得られる、ロボットを基準とした座標から作業対象物を基準とした座標への同次変換行列を用いてロボットを基準とした座標上での作業手順として与えられる、ロボットの制御装置。
(もっと読む)
ロボットの把持制御システム及びロボット
【課題】把持の成否の判定基準を、物体やタスクに応じて適切な基準となるように柔軟に変更可能とすること。
【解決手段】本発明に係るロボット10の把持制御システムは、物体と、その物体に応じた目標把持状態を含む把持方法情報とが対応付けて記憶された把持方法DB30と、把持方法DB30に記憶された把持方法情報に従って物体をハンドにより把持させる際に当該把持の成否の判定に利用する判定基準情報で、目標把持状態に対するセンサ11で検出される把持状態の一致度に関する判定基準情報が、物体と対応付けて記憶された把持判定基準DB40と、把持判定基準DB40を参照して、指令される物体に応じた判定基準情報を取得して把持判定基準情報として決定する把持判定基準決定器60と、一致度が、決定された把持判定基準情報に基づいて把持の成否を判定する把持成否判定器70と、を備える。
(もっと読む)
作業マニピュレータのセンシング動作生成方法及びセンシング動作生成装置
【課題】円弧部分を有する作業ワークであっても、適切なセンシング動作の自動生成をして、センシング動作データの修正、再設定作業の負荷を軽減する。
【解決手段】本発明の作業マニピュレータのセンシング動作生成方法は、円弧部分Cを有する作業ワークWに接触可能な接触式センサ3を備えた作業マニピュレータ2がセンシング動作を行う際に用いられるセンシング動作データを生成する際に好適なものである。センシング動作生成方法は、作業ワークWの円弧部分Cが離散点Dで近似された離散ワークモデルDMにもとづいて、離散点D間が補間されたリアルワークモデルRMを推定し、推定されたリアルワークモデルRMをもとに作業マニピュレータ2のセンシング動作データを生成する。
(もっと読む)
歩行支援装置
【課題】ユーザに違和感を与えることなく歩行動作を歩行支援装置を提供する。
【解決手段】歩行支援装置100は、ユーザの下肢に装着される下肢リンク12、足に装着される足リンク20を備える。足リンク20はジョイント14によって下肢リンク12に揺動可能に連結されている。足リンク20は、モータ16によって揺動する。モータ16はコントローラ10によって制御される。足リンク20には、足が接地しているか否かを検知する接地センサ22が備えられている。コントローラ10は、接地センサ22の出力に基づいて脚が遊脚期間にあるか立脚期間にあるかを判定する。そして、コントローラ10は、立脚期間には出力トルクが目標トルクに一致するようにモータ16をトルク制御する。他方コントローラ10は、遊脚期間には足リンク20の揺動角度が目標角度に一致するようにモータ16を角度制御する。
(もっと読む)
ロボット用事故解析システム
【課題】ロボットに発生した事故状態を客観的にとらえることができるロボット用事故解析システムを提供する。
【解決手段】ロボット2に発生した事故状態を再現するロボット用事故解析システムであって、ロボット2に設けられ、自ロボットの稼動状態情報を認識する稼動情報認識部と、ロボットとは別に設けられた撮像手段6によって撮像されたロボット2とその周辺環境との画像データを環境情報として認識する環境情報認識部とを有し、前記稼動状態情報と前記環境情報とを記録するロボット用レコーダ装置3と、ロボット用レコーダ装置3に記録された稼動状態情報及び環境情報に基づいて事故状態を再現するロボット用シミュレータ装置4とを備える。
(もっと読む)
歩行補助装置
【課題】 膝関節と足首関節を補助する動作と、膝関節の補助をなくし、足首関節を補助する動作とを実行することができる歩行補助装置を提供する。
【解決手段】 ユーザの上腿から下腿にかけて装着できるように構成されており、膝関節にトルクを加えるアクチュエータ38を有する膝装具30と、ユーザの下腿から足にかけて装着できるように構成されており、足首関節にトルクを加えるアクチュエータ58を有する短下肢装具50を備えており、膝装具30が短下肢装具50から分離されていることを特徴とする歩行補助装置10。
(もっと読む)
触覚センサおよびそれを備えたロボット
【課題】検知部の破損および弾性部材の剥離を防止可能な触覚センサを提供する。
【解決手段】触覚センサ10は、基板1と、酸化膜2と、検知部3(31,32)と、弾性部材4と、金属プレート5とを備える。酸化膜2は、基板1上に形成される。検知部3(31,32)は、酸化膜2上に配置される。弾性部材4は、金属プレート5から突出した突出部41,42を有する。弾性部材4は、突出部41,42がそれぞれ検知部31,32を覆うように基板1および酸化膜2上に配置される。金属プレート5は、弾性部材4の突出部41,42と所望の間隔を隔てて突出部41,42の周囲および弾性部材4上に配置される。
(もっと読む)
作業マニピュレータのセンシング動作生成方法、センシング動作生成装置及びセンシング動作生成プログラム
【課題】実際の作業ワーク情報と教示データとの誤差が大きい場合でも、適切なセンシング動作の自動生成をして、センシング動作データの修正、再設定作業の負荷を軽減する。
【解決手段】作業ワークWに接触可能な接触式センサ3を備えた作業マニピュレータ2がセンシング動作を行う際に用いられるセンシング動作データを生成する。作業マニピュレータ2の接触式センサ3が作業ワークWに接触するセンシング姿勢Sにおいて、接触式センサ3が接触する作業ワークWの接触面Tを抽出すると共に、この接触面Tを構成する一つのエッジEを選択し、選択された一つのエッジEの位置と、接触式センサ3の基端3b側に設定した設定位置6を接触面Tに射影した位置WPとが一致するように、作業マニピュレータ2のセンシング姿勢Sを再設定し、再設定されたセンシング姿勢Sを含むように作業マニピュレータ2のセンシング動作データを生成する。
(もっと読む)
21 - 40 / 238
[ Back to top ]