
Fターム[3C007KS31]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | 接触 (238)
Fターム[3C007KS31]に分類される特許
41 - 60 / 238
ロボットのキャリブレーション方法および装置
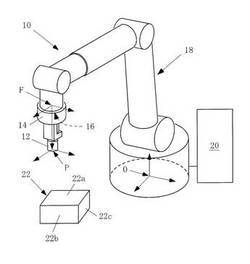
【課題】作業者の熟練度に依存することなく、高い精度で治具とロボットのTCPのキャリブレーションを行うことができるロボットのキャリブレーション方法および装置を提供する。
【解決手段】ツール12と、該ツールとワークとの接触を検出するセンサ14と、6自由度に数値制御可能なロボット18と、センサ計測値やツール接触時のロボット位置姿勢を記憶しロボットを制御する制御装置20と、ツールの作動範囲内に固定され互いに直交もしくは既知の角度で交差する3平面を有する治具22を備える。制御装置20により、3平面22a,22b,22cにツール12を接触させ各接触点の3次元座標を記憶するタッチセンシング工程と、3平面が交差する点を原点とする座標系を補正する座標系設定工程と、ロボット手先フランジ面16に対するツール12の基準位置を算出するツールパラメータ設定工程と、から構成されるシーケンスを実施する。
(もっと読む)
光学式位置検出装置、ハンド装置およびタッチパネル

【課題】比較的簡素な構成および信号処理で、対象物体の位置や、対象物体が至近位置に到達したことを確実に検出することのできる光学式位置検出装置、並びに当該光学式位置装置を備えたハンド装置およびタッチパネルを提供すること。
【解決手段】光学式位置検出装置10では、光源装置11が透光部材40において対象物体Obが位置する第1面41側とは反対側の第2面42側から検出光L2を出射して第1面41側に第1面41に対する法線方向で強度が変化する離間距離検出用光強度分布L2Zabを形成する。また、対象物体Obで反射して透光部材40の第2面42側に透過してきた反射光L3を光検出器30で検出する。透光部材40の第1面41は、弾性および対象物体Obに対する吸着性を備えている。
(もっと読む)
触覚提示付ロボット
【課題】 ユーザの状況に応じた多様な情報を擬人的かつ触覚的に提供する。
【解決手段】 触覚提示付ロボット10は、ロボット本体10Aおよびこれをユーザに装着するためのベルト10Bを備える。ロボット本体10Aにはユーザに対して視覚的および聴覚的に作用する視聴覚アクチュエータ(36−56)が、ベルト10Bにはユーザに対して触覚的に作用する触覚アクチュエータ(74−78)が設けられ、そしてユーザの位置,動き,環境,バイタルサインなどを検知するセンサ(62−70,80)がロボット本体10Aおよびベルト10Bに設けられる。コンピュータ(30)は、ユーザの状況をセンサで検知し(S3−S21)、状況に応じた情報をユーザに対して視聴覚アクチュエータおよび触覚アクチュエータで擬人的かつ触覚的に提示する(S25−S33,S37−S41)。
(もっと読む)
ロボット装置、ロボット装置の行動制御方法及びプログラム
【課題】 学習対象物の共有(共同注意)を可能として、適切に学習対象物を特定することを可能にする。
【解決手段】 ロボット装置は、学習対象物を特定する学習対象物特定手段として機能するセグメンテーション処理部132及び学習対象物検出部133が特定した学習対象物の情報を連想想起記憶部に記憶し、行動制御部により、新たな検出した物と連想想起記憶部に記憶した学習対象物の情報とに基づいて行動をする。
(もっと読む)
移動ロボット
【課題】 移動ロボットのボディが物体に接触した場合を直ちに検知できるとともに、物体と移動ロボットとの接触で作用する力を緩衝することができる移動ロボットを得る。
【解決手段】 移動ロボット本体部の少なくとも下部の周囲を覆うカバーと、カバーの上部を移動ロボット本体部のフレームに、該カバーの面方向において可動に取り付けるカバー上部支持部と、前記カバーの下部を移動ロボット本体部のフレームに、弾性支持するカバー下部支持部と、前記カバーの変位を検出することで、移動ロボットが物体へ接触したことを検知する検知部とを有する。
(もっと読む)
接触検出装置及びロボット
【課題】外部から加えられる力に対する接触センサの耐久性を従来よりも高めること。
【解決手段】ロボットに対する物体の接触を検出する接触検出装置であって、ベース層51と、ベース層51上に積層されると共に、少なくとも部分的に粗面を有する抵抗層52と、抵抗層52上に積層されると共に、抵抗層52の粗面に対応する粗面を有する抵抗層54と、ベース層51上に積層されると共に、抵抗層52、54間に層間空間を形成するスペーサ層53と、を備え、抵抗層52、54間の間隔は、抵抗層52、54の少なくとも一方の変形時、抵抗層52の粗面と抵抗層54の粗面間に摩擦が生じるように設定されている。この構成を採用することによって、外部から加えられる力に対する接触センサの耐久性を従来よりも高めることができる。
(もっと読む)
ロボット用ドライブレコーダ装置
【課題】 ロボットに係る情報を記録し、事故発生時における事故原因の究明に有効な情報を記録する「ロボット用ドライブレコーダ装置」を提供する。
【解決手段】 ロボット用ドライブレコーダ装置1は、自ロボットの稼動時の周辺環境を撮像するカメラ5、マイクロフォン6、ロボットセンサ4、各データを記録する記録装置9と、自ロボットに接近或いは接触する物体を検出しその検出結果から異常状態にあるか否かを判断するCPU2と、ネットワーク11を介して外部データベース12に通信可能な通信部10とを備え、CPU2が異常状態であると判断したときは、記録装置9に記録された各種データを通信部10によって外部データベース11に送信するものである。
(もっと読む)
触覚センサー装置およびそれを用いたロボット
【課題】より正確な力の検出が可能な触覚センサー装置およびそれを用いた構造が簡単で小型のロボットを得ること。
【解決手段】触覚センサー81,82の検出期間がそれぞれ異なるので、他の触覚センサー81または82の振動の伝達による検出時のSN比の低下を抑えることができる。したがって、より正確な力の検出が可能な触覚センサー装置1000を得ることができる。また、触覚センサー81,82を順次駆動するので配線が少なくてすみ、前述の効果を備え、構造が簡単で小型のロボット100を得ることができる。
(もっと読む)
5指型ハンド装置
【課題】人間の手と同様の動作を実現し且つ小型軽量化を可能とすることにより、ヒューマノイドロボットに好適に採用できる5指型ハンド装置を提供する。
【解決手段】示指機構6と中指機構7との何れか一方又は両方及び拇指機構5に、指先部に作用する力を検出する力センサ21を設ける。力センサ21を備える指機構を、指先でのつまみ動作を含む器用動作を行う器用指とする。器用指以外の指機構は、器用指の動作に応じて握り動作を含む力動作を行う力指とする。
(もっと読む)
脚補助装具
【課題】ユーザに違和感を与えることなく立ち上がり動作や着座動作を補助することのできる脚補助装具を提供する。
【解決手段】脚補助装具は、リンク機構、アクチュエータ、角度センサを備えている。リンク機構は、大腿リンクと下腿リンクがジョイントによって揺動可能に連結されている構造を有している。大腿リンクと下腿リンクを夫々ユーザの大腿と下腿に固定すると、ジョイントがユーザの膝関節に隣接して位置する。アクチュエータはジョイントを駆動する。脚補助装具は、ジョイントを駆動することによって、大腿リンクと下腿リンクが揺動して脚の動作を補助する。角度センサは、ジョイントの角度を検出する。本発明の脚補助装具は、検出された初期ジョイント角から予め定められた最終目標角まで、等加速等減速の三角速度パターンでジョイントを駆動することを特徴とする。
(もっと読む)
ロボットアーム、ロボットアームの接触検知方法、及び、ロボットアームを備えた装置
【課題】他の物体への接触を検知する信頼性、経済性、及び、稼働率などを向上させることができ、接触トラブルによる損害をより低減することの可能なロボットアーム、ロボットアームの接触検知方法、及び、ロボットアームを備えた装置の提供を目的とする。
【解決手段】ロボットアーム10は、駆動モータ2a、2b、2cと、モータ軸用の角度センサ22a、22b、22cと、減速機と、出力軸用の角度センサ32a、32b、32cと、ロボットアーム部4a、4b、4cと、モータ制御手段50とを備えた構成としてある。
(もっと読む)
ロボットハンド用撮像装置内蔵フィンガ
【課題】発光手段を用いなくとも対象物との接触部位を撮像することのできるロボットハンド用撮像装置内蔵フィンガを提供することにより、コストの低減を図ることを課題とする。
【解決手段】対象物10を把持することで変形する弾性外皮12と、弾性外皮12を支持するフィンガ本体11と、フィンガ本体11の内部に設けられて弾性外皮12の変形状態を撮像する撮像装置13とを有する。さらに、ロボットハンド用撮像装置内蔵フィンガ101において、フィンガ本体11は、外部から撮像装置13の撮像範囲F1に光を導入する光透過部11及び12を備える。
(もっと読む)
マニピュレータ
【課題】衝突において安全なマニピュレータを提供する。
【解決手段】気体を充満した中空材と、中空材を被い中空体に張力を作用させる複数本の形状記憶合金ばねからなるアームリンクを構成する。障害物を検出した時は中空材内部の気体を放出すると共に衝突部位に応じて形状記憶合金ばねに供給する電流を制御してその張力を変化させ、障害物と中空体の衝突部位が離れるように中空体を屈曲させ衝突を回避する。
(もっと読む)
搬送ロボット
【課題】高価な力センサや複雑な信号処理を不要にしつつ、吸着部材を適切な力で対象物に確実に押し付けた状態で対象物を吸着把持できる搬送ロボットを提供する。
【解決手段】
支持体5が取り付けられ、支持体を移動させるように動作する動作機構7と、吸着部材3を対象物に押し付けるために、吸着部材と支持体のうち吸着部材を移動方向前方側にして、吸着部材を対象物に向けて移動させる押付移動を動作機構に行わせる動作制御部11と、押付移動により吸着部材が対象物に押し付けられることで、吸着部材が弾性的に支持体側へ押し戻された量が所定量に達したかを検知する押付検知部9とを備える。押付検知部が、吸着部材の押し戻された量が所定量となったことを検知した時に、動作制御部は、押付移動を停止させる。
(もっと読む)
ロボットの制御装置およびロボット
【課題】力センサを用いることなく、ロボットと障害物との接触を高精度に検出可能で安全性を向上させるロボットの制御装置を提供する。
【解決手段】
ロボットの駆動力を制御するロボットの制御装置であり、制御装置は所望の動作軌跡と速度を出力し、駆動力が所定時間内にロボットに対してした仕事量である制御仕事量を算出し、エネルギー推定値を算出し、所定時間内のエネルギー変化の推定値を算出し、制御仕事量とエネルギー変化推定値とに基づいてロボットへの動作指令速度を調整または停止指令または警報を発生するように構成する。
(もっと読む)
ロボット制御装置及び方法
【課題】コストの増加等の問題を生ずることなく、把持動作の成功率を向上させる。
【解決手段】本発明に係るロボット制御装置は、ロボットの体幹部に搭載され作業領域の画像情報を取得する撮像装置2と、撮像装置2により取得された画像情報に基づいて物体の位置を認識する物体位置認識部3と、物体位置認識部3により認識された物体の位置に基づいてアーム部を動作させるアーム制御部4と、撮像装置3により取得された画像情報に基づいてハンド部、物体、及び撮像装置の相対的な位置関係を認識し、この位置関係に基づいてハンド部が適正位置にあるか否かを判定するハンド位置判定部5と、ハンド部が適正位置にあると判定された場合にハンド部に物体を把持する動作を実行させるハンド制御部6と、ハンド部が適正位置にないと判定された場合にアーム部にハンド部を適正位置に移動させる動作を実行させるアーム修正動作部7とを備える。
(もっと読む)
移送システム
【課題】本発明は、異形の混在した箱物の大きさを検出して、正確に移載するロボットシステムを提供する。
【解決手段】
カセットに積載された箱物3を移載する移送システムであって、前記箱物3を積載した前記カセットと、前記カセットに少なくとも2つのアーム7R、7Lを挿入し、前記箱物3を移載する双腕ロボット1との間に、コンベア2を介して対向するように配置されたものである。
(もっと読む)
ロボットハンド
【課題】 精度良く物体を選別し、物体を把持することを提供することにある。
【解決手段】 支持部40と、支持部40に設けられ、物体100を把持するための対向する第1及び第2の把持部110と、第1及び第2の把持部110にそれぞれ設けられ、物体100に光を照射するための対向する第1及び第2の光源90と、支持部40に設けられ、且つ、第1及び第2の把持部110を含む平面によって挟まれた領域に設けられ、且つ、光によって照射された物体100を撮像して物体100の画像を取得する撮像装置50と、撮像装置50に接続され、且つ、撮像装置50で取得した画像を処理する画像処理装置とを備えたことを特徴とするロボットハンド。
(もっと読む)
把持部を有するロボットハンドシステム
【課題】把持部を有するロボットハンドシステムにおいて、センサを複数必要とせずに、最小限の把持力で対象物を把持することを可能とすることである。
【解決手段】ロボットハンドシステム10のハードウェアの部分は、1つの昇降アクチュエータ12と、複数の把持アクチュエータ14と、複数の多関節部17の各先端の把持端部にそれぞれ設けられる探触子20を含んで構成される。探触子20に接続される接触・滑り度検出部50は、探触子20に対象物が全く接触していない非接触状態と、探触子20と対象物が相対的に移動していない接触把持状態と、探触子20と対象物が相対的に移動していわゆる滑っている滑り状態とを区別して検出する機能を有する。この機能を用いて、制御部70は、最小限の把持力で対象物を把持するように、把持アクチュエータ14を駆動する。
(もっと読む)
ロボットの制御装置
【課題】ロボットの接触状態の判定を元に位置制御と力制御を使い分けロボットの位置や姿勢だけでなく力加減を非接触状態から接触状態まで連続的に制御、教示し、再生することができるロボットの制御装置を提供する。
【解決手段】先端にエンドエフェクタを取り付けたロボット101を教示装置108により誘導して接触を伴う作業を教示し、教示した作業を再生するロボットの制御装置において、作業の教示時に、エンドエフェクタまたは把持対象物103が作業対象物104に接触していない場合にはロボット101を位置制御にて誘導し、教示点の登録の際にロボット101の位置を記憶し、エンドエフェクタまたは把持対象物103が作業対象物104に接触している場合にはロボット101を力制御で誘導し、教示点の登録の際に力の大きさを記憶する。
(もっと読む)
41 - 60 / 238
[ Back to top ]