
Fターム[3C007KS31]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | 接触 (238)
Fターム[3C007KS31]に分類される特許
61 - 80 / 238
ロボットアーム及びロボットアーム装置
【課題】ロボットアームに加わる衝撃力を緩和する装置を製作する際に、その装置を構成する部品の加工時間や、それらの部品を組み立てたり、調整したりする時間がかかるという課題がある。
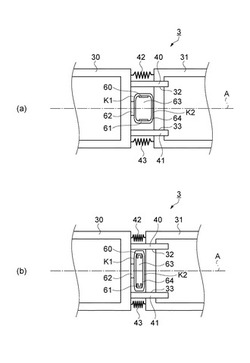
【解決手段】ロボットアーム3は、軸Aの方向に直列に並ぶ2つのアーム部分30,31と、2つのアーム部分30,31を連結する連結部と、軸Aの方向の力を検出するセンサとしての圧電素子62と、圧電素子62の電気的変化を検出し、信号を出力する検出回路と、信号によって電源回路を遮断する遮断回路と、電源回路に接続され、電圧の変化によって伸縮する電歪ポリマー63と、電歪ポリマー63を包んだ状態で外形形状が変化する包装部64と、を備え、包装部64の軸Aの方向と直交する両側の面K1,K2が、2つのアーム部分30,31のうちの一方のアーム部分と、他方のアーム部分または連結部に当接して備えられる。
(もっと読む)
脚式移動ロボット及びその制御方法

【課題】ロボットが着床の際に床面から受ける衝撃を可能な限り緩和する。
【解決手段】脚式移動ロボットは、少なくとも下肢と、該下肢の上方に配設された上体とで構成され、下肢の運動により各種の動作パターンを実現する。移動ロボットは、離床期間を検出する検出手段と、離床期間中に関節アクチュエータのインピーダンスを低下させるとともに、着床を検出したことに応答して関節アクチュエータのインピーダンスを元の値に戻す制御手段とを備える。離床期間中に関節アクチュエータのインピーダンスを低下させ、関節アクチュエータが緩衝材として機能するような状態で着床を待機する。
(もっと読む)
ロボットハンド及びロボットハンドの制御装置
【課題】単純な構造かつ簡単な制御によって、多種多様な形状の把持対象物を把持可能なロボットハンド及びその制御装置を提供する。
【解決手段】屈曲可能な指部と、低剛性状態と高剛性状態との間で可逆的に制御可能な剛性付与部と、把持対象物に接触可能でかつ膨張可能な当接部とを備える指を複数個、ベース部に配置し、剛性付与部が低剛性状態のとき指部を屈曲させて把持対象物に当接部を接触させ、剛性付与部を高剛性状態に硬化させ、当接部を膨張させ、把持対象物と剛性付与部の間に把持力を発生させて把持対象物の把持を行う。
(もっと読む)
触行動認識装置及び触行動認識方法、情報処理装置、並びにコンピューター・プログラム
【課題】機器が外環境と1以上の箇所で接触した際に特定の触行動を認識する。
【解決手段】前処理として、複数の接触点をクラスタリングし、1つのパターンとみなせる接触点を群として抽出し、さらに各接触点群について複数の特徴量を抽出する。次いで、自己組織化マップを重層的に用いることによって、非線形且つ組み合わせ可能な触行動認識を行なう。全身に触覚を分布させたロボットに対する接触インタラクションや接触検出デバイスを介して、複数の指の特徴的な動きによる機器操作に適用することができる。
(もっと読む)
指骨接触ロードセル
【課題】許容される大きさで、一軸を超えて作用するロボットの手の指が受ける負荷を測定するセンサーを提供する。
【解決手段】ロボットシステムの指骨に掛かる負荷を測定する接触ロードセル10は、指骨にそのロードセル10を搭載するのに使用できる第一及び第二端部30,34と、中央部32とを有しているフレキシブルひずみ素子12を備えている。ひずみ素子12は、また、第一端部30及び中央部32に接続される少なくとも3つの部位を有する第一S形状部材110と、第二端部34及び中央部32に接続される少なくとも3つの部位を有する第二S形状部材112とを備えている。ロードセル10は、また、8対のひずみゲージを備えており、そのひずみゲージの各対は、各S形状部材110、112の各部位の1つの対向する両面に搭載されており、ひずみゲージの各対は、6つの自由度におけるひずみ測定値を提供している。
(もっと読む)
ロボットシステム
【課題】回転軸に対して切削工具を位置決めする構造を不要とし、なおかつ、切削工具を交換した際のティーチングデータの修正を不要としながらも、加工精度の低下を抑制することができるロボットシステムを提供する。
【解決手段】多軸のアームの軸端が回転軸に構成され、或いは、当該軸端に回転軸が付加され、当該回転軸にワークを加工するカッター刃ユニット14を着脱自在に支持し、予めティーチングされたティーチングデータにしたがって前記カッター刃ユニット14の姿勢制御を行うロボット5と、前記カッター刃ユニット14の切れ刃25の前記回転軸周りの位置と、前記ティーチングデータにおける前記回転軸周りの基準位置θsとのずれ量Δ下を検出する検出ユニット21と、を備え、前記ずれ量Δθに基づいて、前記回転軸周りに前記カッター刃ユニット14の切れ刃25の位置を補正するバリ取りシステム1を構成した。
(もっと読む)
移載ロボット
【課題】ワークを確実にストレージ体に保持させることができ、またストレージ体からワークをマテハン部で確実に把持して移載することことができる移載ロボットを提供すること。
【解決手段】ストレージ体2(3)から別のストレージ体3(2)へワーク100を移載するために用いられる移載ロボット1である。移載ロボット1は、ワーク100を把持するマテハン部5と、これをを移動させるためのアーム15とを備える。マテハン部5は、ワーク100を把持するクランプ部51、52と、ワーク100を把持した状態でマテハン部5に付与される鉛直方向の荷重を検出して検出信号Pを送信する第1ロードセルと、マテハン部5に付与される水平方向の荷重を検出して検出信号Qを送信する第2ロードセルとを有する。移載ロボット1は、検出信号P及び/又は検出信号Qに基づいて、マテハン部5の作動を制御するように構成されている。
(もっと読む)
ロボット装置及びロボット装置の制御方法
【課題】設置後の微調整を自動的に行うロボット装置であって、操作者の熟練を要せず、作業対象との距離や作業対象の傾きについて正確に補正でき、また、ロボット装置の設置位置が所定の位置から大きくずれていても位置補正が行えるロボット装置を提供する。
【解決手段】作業対象が設置される平面102と同一平面上の一直線上にない3箇所の接触点102a,102b,102cにマニピュレータ1の手先を接触させ接触点102a,102b,102cの位置を検出し、この位置に基づいて平面102の傾き及び高さ位置を計測し、マニピュレータ1の手先の撮像手段6の光軸を平面102に垂直として平面102上のマーカ103を撮像し、撮像されたマーカ103の画像を画像処理してマーカ103の位置及び回転方向を計測し、次に、平面102の傾き、高さ位置、平面102上におけるマーカ103の位置及び回転方向に基づき、マニピュレータ1を制御する。
(もっと読む)
ロボットハンドの指構造
【課題】ロボットハンドの指構造を効果的に小型化すること。
【解決手段】ロボットハンドの指構造10は、ロボットハンドの指付根部11の関節12を回転駆動する付根駆動部1と、指本体3の関節13を回転駆動する指本体駆動部2と、指本体3の長手方向に沿って配設され、相互に歯合する歯車列4と、を備えている。また、指付根部11の近傍には、付根駆動部1及び指本体駆動部2が併設されている。さらに、指本体駆動部2は、歯車列4を介して、指本体3の関節13を回転駆動する。
(もっと読む)
真空用接触センサ
【課題】構成簡易ながら検知範囲を広く設定し得る上に死角が少なく、かつ接近感知部を軽量とすることが可能な真空用接触センサを得る。
【解決手段】接近感知部10は、互いに接触または近接すると電気的に導通するように構成された可撓性を有する第1および第2の導電性薄板11,12を、内外方向に互いに離間した状態でアーチ状に湾曲形成してなるものであり、マニピュレータ3の先端表面部の全域を覆うように配置されている。マニピュレータ3が他物体と衝突する前に接近感知部10が他物体に当接して変形し、第1および第2の導電性薄板11,12が互いに接触または近接して電気的に導通したことを導通検出回路部20が検出することにより、マニピュレータ3が他物体と接近したことを検知する。
(もっと読む)
ロボットハンド装置
【課題】ワーク置き場にワークを置く際に、ワークが受ける衝撃を小さくすることができ、かつ電気的構成が簡単なロボットハンド装置を提供することを課題とする。
【解決手段】ロボットハンド装置1は、アーム部2とハンド部3とワーク置き場4とを備えており、ワークWを所定の場所からワーク置き場4まで搬送する搬送モードと、ワークWを解放しワーク置き場4に置く載置モードと、に切り替え可能である。ロボットハンド装置1は、アーム部2、ハンド部3、ワーク置き場4、ワークWのうち、少なくとも一つを導通経路とする電気回路50を備えている。載置モードにおいては、ハンド部3に把持されたワークWがワーク置き場4に既に置かれているワークWに接触することにより、電気回路50が導通し、電気回路50の導通をトリガーとして、ハンド部3がワークWを解放する。
(もっと読む)
ロボットフィンガ及びこれを備えるロボットハンド
【課題】ワークを把持し易いロボットフィンガ及びロボットハンドを提供する。
【解決手段】本発明に係るロボットフィンガ3は、ワーク40を把持するための指本体6と、該指本体6の先端から突出するよう設けられた接触部材10とを備え、指本体6に、その先端の一部から接触部材10の突出方向に延びる突出部31が設けられている。
(もっと読む)
作業座標系の設定方法及び作業座標系の異常検出方法
【課題】本発明は、ハンドと対象ワークとの相対的位置精度が高く、再現性に優れる作業座標系の設定方法及び作業座標系の異常検出方法を提供する。
【解決手段】ロボット1と対象ワークの相対的な位置関係を規定する作業座標系の設定方法において、ロボット1のハンド4が対象ワークに接触したことを検出するために力センサ6を用いることと、力センサ6からの検出値が予め設定された閾値を超えたときにハンド4が対象ワーク9に接触したと判断することと、接触位置を記憶することと、接触位置から作業座標系Cを算出すること、を備える。
(もっと読む)
触覚センサを有するロボット
【構成】ロボット10は、たとえば、触覚インタラクションのために触覚センサ(58,76)を備えるコミュニケーションロボットである。ロボット10は、複数の姿勢領域のそれぞれに対応付けられた、動作データと触覚センサ出力データの関係を示す線形モデルを記憶している。ロボット10が運動する際には、ロボット10は動作データすなわち関節角度データを取得し、現在の姿勢領域に対応する線形モデルを選択し、当該線形モデルを用いて触覚センサ出力データを推定する。そして、ロボット10は、実際に取得された触覚センサ出力データから推定値を差し引くことによって、自己動作に起因するノイズを除去する。
【効果】自己動作に起因する触覚ノイズを除去することができる。
(もっと読む)
物品取り出し装置
【課題】安価でありながら高速かつ正確に、バラ積み状態からの物品の取り出しが可能な物品取り出し装置を提供する。
【解決手段】画像処理部22の対象物検出部22aは、ビデオカメラ18で撮影された画像を画像処理し、部品を検出する。対象物選定部22bは、複数検出された部品の内、ある規則に従い取り出し対象の部品を選定する。視線方向計算部22cは、選択された部品への視線方向を計算する。対象物位置推定部22dは、選択された部品の画像上でのサイズ情報から高さを含む位置を推定し、次に把持補正量計算部22eが、ロボットによる部品の把持に必要な補正量を計算する。
(もっと読む)
ロボットハンド用触覚センサー機構及びそのロボットハンド用触覚センサー機構を備えるロボット
【課題】少ないセンサーまたは小さなセンサーで感知領域を広くしたロボットハンド用触覚センサー機構及びそのロボットハンド用触覚センサー機構を備えるロボットを提供する。
【解決手段】ロボットハンド用触覚センサー機構1は、本体部2と、本体部2に接着されたシリコンゴムからなる外皮部3と、本体部2に固定されると共に外皮部3内に収容されたセンサー固定部5と、センサー固定部5に設けられた感圧センサー6とから構成されている。感圧センサー6は、外皮部3の内面3aに接するセンサー素子7と、センサー固定部5に固定された基盤8とから構成されている。外皮部3は、その断面が蛇腹状の形状を有している。外皮部3は、その内面3aのうち、蛇腹形状の谷底部3a1がセンサー素子7に接するように、部分的にセンサー素子7に接している。
(もっと読む)
ぬいぐるみロボット
【課題】玩具としてだけでなく、人間にとって癒しの効果を有し、かつ、人間とコミュニケーションをとることのできるぬいぐるみロボットを提供する。
【解決手段】弾力性を有する充填材料4からなる動作部2と、充填材料4の内部を貫通するように、又は充填材料4の外側に沿うように配設された少なくとも1本の糸3(3a〜3c)と、糸3の巻き取り、巻出しを行うモータと、糸3(3a〜3c)の長さを検出するエンコーダと、糸3(3a〜3c)の張力を検出するセンサ部と、エンコーダ及び前記センサ部から検出された値に基づいて、モータを制御する制御部とにより、ぬいぐるみロボットを構成する。
(もっと読む)
物体接触面を有するロボットハンド
【課題】対象物と接する物体接触面を有するロボットハンドにおいて、位置推定のための発光手段を不要としてコストを低減する。
【解決手段】ロボットハンドは、対象物170と接する物体接触面P1を有する。物体接触面P1には光センサ140が設けられる。物体接触面P1が対象物に接触すると、物体接触面P1に設けられる光センサ140は対象物170の作用表面171と物体接触面P1とによって周囲を覆われるため、検出される光は弱くなる。これに応じて、制御部160は、物体接触面P1が対象物170に接触していると判定する。
(もっと読む)
ロボットアーム、ロボット及び制御方法
【課題】打楽器の演奏だけでなく他の作業も可能とするロボットアームを提供すること。
【解決手段】本発明の一態様に係るロボットアームは、動作部と、前記動作部が回動自在に連結された支持部と、前記動作部の回動運動を直線運動に変換して、移動部材に伝達する変換機構と、前記移動部材の移動距離を検出する距離センサと、前記距離センサで検出された前記移動部材の移動距離に基づいて、前記動作部の動作を制御する制御部とを備えるものである。
(もっと読む)
ロボット、ロボットプログラム共有システム、ロボットプログラム共有方法およびプログラム
【課題】共有プログラムデータベースからプログラムを検索する際に、簡単な操作でプログラムを取得できるロボットプログラム共有システムを提供する。
【解決手段】ロボット200の、所定の事象を検知するイベント入力部205と、イベント入力部205で所定の条件に適合する事象を検知した場合に、その条件に応じて、プログラム取得指令またはプログラム実行指令のいずれかを含む指令を生成するコマンド生成部206と、プログラム取得指令を生成した場合に、イベント入力部205で検知した事象に応じて共有プログラムデータベース100から所定のプログラムを検索してダウンロードするプログラム検索部212と、プログラム実行指令を生成した場合に、ロボット200に格納しているプログラムを実行するプログラム実行部204と、を備える。特に、イベント入力部205は、動作を表す明示的な言語の媒介によらない事象を検知する。
(もっと読む)
61 - 80 / 238
[ Back to top ]